Online Robot Navigation and Manipulation with Distilled Vision-Language Models
2401.17083
0
0

Abstract
Autonomous robot navigation within the dynamic unknown environment is of crucial significance for mobile robotic applications including robot navigation in last-mile delivery and robot-enabled automated supplies in industrial and hospital delivery applications. Current solutions still suffer from limitations, such as the robot cannot recognize unknown objects in real-time and cannot navigate freely in a dynamic, narrow, and complex environment. We propose a complete software framework for autonomous robot perception and navigation within very dense obstacles and dense human crowds. First, we propose a framework that accurately detects and segments open-world object categories in a zero-shot manner, which overcomes the over-segmentation limitation of the current SAM model. Second, we proposed the distillation strategy to distill the knowledge to segment the free space of the walkway for robot navigation without the label. In the meantime, we design the trimming strategy that works collaboratively with distillation to enable lightweight inference to deploy the neural network on edge devices such as NVIDIA-TX2 or Xavier NX during autonomous navigation. Integrated into the robot navigation system, extensive experiments demonstrate that our proposed framework has achieved superior performance in terms of both accuracy and efficiency in robot scene perception and autonomous robot navigation.
Create account to get full access
Overview
- This paper explores using distilled vision-language models for online robot navigation and manipulation tasks.
- The researchers developed a system that can understand natural language instructions and perform complex robotic actions in real-time.
- Key contributions include a novel distillation approach to create compact vision-language models and demonstrating their use for robotic control.
Plain English Explanation
The researchers in this paper developed a new way for robots to understand and follow natural language instructions, like "Go to the table and pick up the blue cup." They took large, powerful language models that can comprehend human language and made them more compact and efficient, so they can run in real-time on robot hardware.
This allows robots to be controlled using plain, conversational language rather than having to program every step manually. The robots can see their environment, understand what they're being asked to do, and then perform the required navigation and manipulation tasks, like moving to a location and grasping an object.
The core innovation is the distillation process that shrinks down the large language models without losing too much of their language understanding capability. This makes them practical to use on real robots, which often have limited computing power compared to large servers. With this system, robots can take high-level instructions and translate them into the low-level movements needed to accomplish complex tasks.
Technical Explanation
The paper presents a system for using distilled vision-language models to enable online robot navigation and manipulation. The key components are:
-
Vision-Language Model Distillation: The researchers take a large, pre-trained CLIP vision-language model and use a novel distillation technique to create a more compact version that retains the core language understanding and grounding capabilities. This allows the model to run efficiently on robot hardware.
-
Robot Control with Language Instructions: The distilled vision-language model is integrated with a robotic control system. It can accept natural language instructions, understand the semantics, and then generate the appropriate low-level control signals to execute navigation and manipulation tasks.
-
Evaluation on Real Robots: The system is demonstrated on physical robot platforms, showing its ability to follow instructions like "Go to the table and pick up the blue cup" in real-time.
The distillation process involves training the compact model to mimic the outputs of the large CLIP model on a diverse dataset of image-text pairs. This allows the smaller model to retain the powerful language understanding and grounding capabilities, while being much more efficient to run.
Critical Analysis
The paper presents an impressive demonstration of using distilled vision-language models for real-world robotic control. However, a few potential limitations and areas for further research are worth noting:
- The experiments are conducted in relatively simple, controlled environments. Scaling the approach to more complex, cluttered, or dynamic real-world settings may present additional challenges.
- The distillation process, while effective, may lead to some loss of accuracy or robustness compared to the original large model. The tradeoffs between model size, inference speed, and performance should be explored further.
- The paper does not address how the system would handle ambiguous, incomplete, or contradictory language instructions, which can often occur in natural human-robot interaction.
Overall, this research represents an important step towards making language-driven robotic control more practical and accessible. Further work to improve the generalization, robustness, and human-robot interaction capabilities of these distilled vision-language models could have significant implications for a wide range of real-world robotic applications.
Conclusion
This paper demonstrates the feasibility of using distilled vision-language models for online robot navigation and manipulation tasks. By developing a compact version of a powerful language understanding model, the researchers have shown how robots can be controlled using natural, conversational language rather than requiring manual programming of every step.
The key innovation is the distillation process that preserves the core language and grounding capabilities of the original large model, while making it efficient enough to run in real-time on robot hardware. This allows robots to interpret high-level instructions and translate them into the low-level actions needed to accomplish complex tasks.
While the current system has some limitations, this research represents an important step towards more natural and intuitive human-robot interaction. Further advancements in this area could lead to significant improvements in the accessibility and real-world applicability of robotic systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Learning Robust Autonomous Navigation and Locomotion for Wheeled-Legged Robots
Joonho Lee, Marko Bjelonic, Alexander Reske, Lorenz Wellhausen, Takahiro Miki, Marco Hutter
0
0
Autonomous wheeled-legged robots have the potential to transform logistics systems, improving operational efficiency and adaptability in urban environments. Navigating urban environments, however, poses unique challenges for robots, necessitating innovative solutions for locomotion and navigation. These challenges include the need for adaptive locomotion across varied terrains and the ability to navigate efficiently around complex dynamic obstacles. This work introduces a fully integrated system comprising adaptive locomotion control, mobility-aware local navigation planning, and large-scale path planning within the city. Using model-free reinforcement learning (RL) techniques and privileged learning, we develop a versatile locomotion controller. This controller achieves efficient and robust locomotion over various rough terrains, facilitated by smooth transitions between walking and driving modes. It is tightly integrated with a learned navigation controller through a hierarchical RL framework, enabling effective navigation through challenging terrain and various obstacles at high speed. Our controllers are integrated into a large-scale urban navigation system and validated by autonomous, kilometer-scale navigation missions conducted in Zurich, Switzerland, and Seville, Spain. These missions demonstrate the system's robustness and adaptability, underscoring the importance of integrated control systems in achieving seamless navigation in complex environments. Our findings support the feasibility of wheeled-legged robots and hierarchical RL for autonomous navigation, with implications for last-mile delivery and beyond.
5/6/2024
🌐
Efficient Robot Learning for Perception and Mapping
Niclas Vodisch
0
0
Holistic scene understanding poses a fundamental contribution to the autonomous operation of a robotic agent in its environment. Key ingredients include a well-defined representation of the surroundings to capture its spatial structure as well as assigning semantic meaning while delineating individual objects. Classic components from the toolbox of roboticists to address these tasks are simultaneous localization and mapping (SLAM) and panoptic segmentation. Although recent methods demonstrate impressive advances, mostly due to employing deep learning, they commonly utilize in-domain training on large datasets. Since following such a paradigm substantially limits their real-world application, my research investigates how to minimize human effort in deploying perception-based robotic systems to previously unseen environments. In particular, I focus on leveraging continual learning and reducing human annotations for efficient learning. An overview of my work can be found at https://vniclas.github.io.
5/24/2024
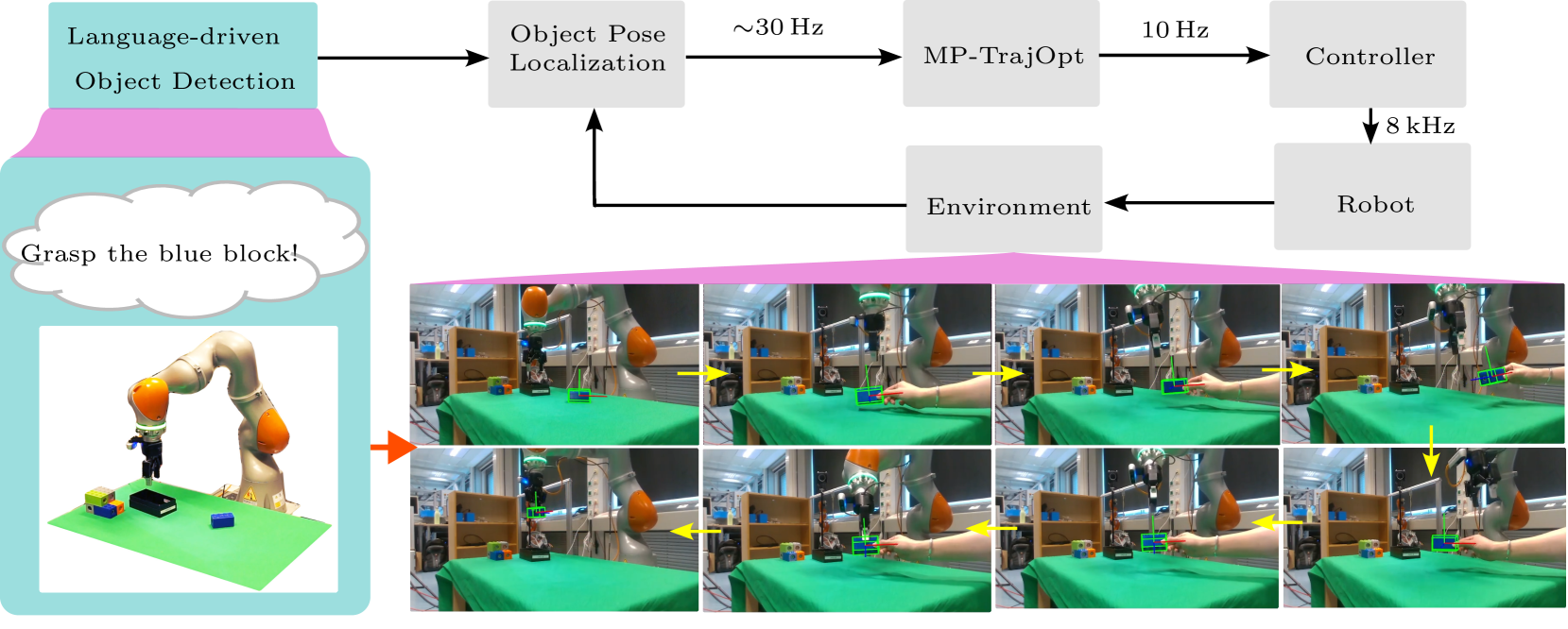
Language-Driven Closed-Loop Grasping with Model-Predictive Trajectory Replanning
Huy Hoang Nguyen, Minh Nhat Vu, Florian Beck, Gerald Ebmer, Anh Nguyen, Andreas Kugi
0
0
Combining a vision module inside a closed-loop control system for a emph{seamless movement} of a robot in a manipulation task is challenging due to the inconsistent update rates between utilized modules. This task is even more difficult in a dynamic environment, e.g., objects are moving. This paper presents a emph{modular} zero-shot framework for language-driven manipulation of (dynamic) objects through a closed-loop control system with real-time trajectory replanning and an online 6D object pose localization. We segment an object within $SI{0.5}{second}$ by leveraging a vision language model via language commands. Then, guided by natural language commands, a closed-loop system, including a unified pose estimation and tracking and online trajectory planning, is utilized to continuously track this object and compute the optimal trajectory in real-time. Our proposed zero-shot framework provides a smooth trajectory that avoids jerky movements and ensures the robot can grasp a non-stationary object. Experiment results exhibit the real-time capability of the proposed zero-shot modular framework for the trajectory optimization module to accurately and efficiently grasp moving objects, i.e., up to SI{30}{hertz} update rates for the online 6D pose localization module and SI{10}{hertz} update rates for the receding-horizon trajectory optimization. These advantages highlight the modular framework's potential applications in robotics and human-robot interaction; see the video in https://www.acin.tuwien.ac.at/en/6e64/.
6/21/2024
🏅
RUMOR: Reinforcement learning for Understanding a Model of the Real World for Navigation in Dynamic Environments
Diego Martinez-Baselga, Luis Riazuelo, Luis Montano
0
0
Autonomous navigation in dynamic environments is a complex but essential task for autonomous robots, with recent deep reinforcement learning approaches showing promising results. However, the complexity of the real world makes it infeasible to train agents in every possible scenario configuration. Moreover, existing methods typically overlook factors such as robot kinodynamic constraints, or assume perfect knowledge of the environment. In this work, we present RUMOR, a novel planner for differential-drive robots that uses deep reinforcement learning to navigate in highly dynamic environments. Unlike other end-to-end DRL planners, it uses a descriptive robocentric velocity space model to extract the dynamic environment information, enhancing training effectiveness and scenario interpretation. Additionally, we propose an action space that inherently considers robot kinodynamics and train it in a simulator that reproduces the real world problematic aspects, reducing the gap between the reality and simulation. We extensively compare RUMOR with other state-of-the-art approaches, demonstrating a better performance, and provide a detailed analysis of the results. Finally, we validate RUMOR's performance in real-world settings by deploying it on a ground robot. Our experiments, conducted in crowded scenarios and unseen environments, confirm the algorithm's robustness and transferability.
4/26/2024