Language-Driven Closed-Loop Grasping with Model-Predictive Trajectory Replanning
2406.09039
0
0
Abstract
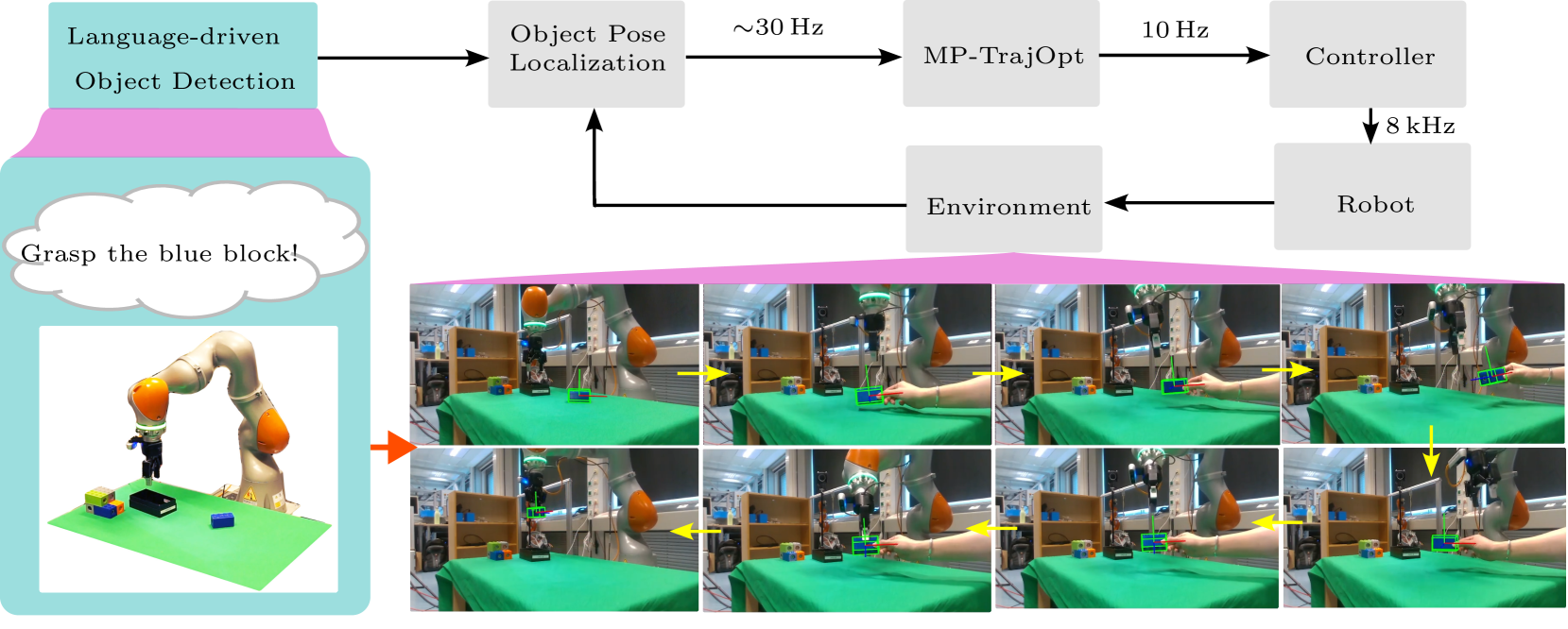
Combining a vision module inside a closed-loop control system for a emph{seamless movement} of a robot in a manipulation task is challenging due to the inconsistent update rates between utilized modules. This task is even more difficult in a dynamic environment, e.g., objects are moving. This paper presents a emph{modular} zero-shot framework for language-driven manipulation of (dynamic) objects through a closed-loop control system with real-time trajectory replanning and an online 6D object pose localization. We segment an object within $SI{0.5}{second}$ by leveraging a vision language model via language commands. Then, guided by natural language commands, a closed-loop system, including a unified pose estimation and tracking and online trajectory planning, is utilized to continuously track this object and compute the optimal trajectory in real-time. Our proposed zero-shot framework provides a smooth trajectory that avoids jerky movements and ensures the robot can grasp a non-stationary object. Experiment results exhibit the real-time capability of the proposed zero-shot modular framework for the trajectory optimization module to accurately and efficiently grasp moving objects, i.e., up to SI{30}{hertz} update rates for the online 6D pose localization module and SI{10}{hertz} update rates for the receding-horizon trajectory optimization. These advantages highlight the modular framework's potential applications in robotics and human-robot interaction; see the video in https://www.acin.tuwien.ac.at/en/6e64/.
Create account to get full access
Overview
- This paper presents a closed-loop grasping system that combines language-driven robot control with model-predictive trajectory replanning.
- The system allows a robot to grasp objects in a cluttered environment based on natural language instructions, using real-time feedback to adjust its trajectory as needed.
- The approach leverages a deep learning model to map language to robot actions, and a model-predictive control algorithm to continuously update the robot's motion plan.
Plain English Explanation
This research describes a robot system that can grasp objects in a cluttered environment based on simple language commands. For example, you could tell the robot "Pick up the red cup on the table" and it would use computer vision and motion planning to figure out how to grab that specific object.
The key innovation is that the robot doesn't just execute a pre-planned motion - it continuously adjusts its trajectory in real-time based on feedback from its sensors. This allows it to adapt to changes in the environment and successfully complete the task, even if the object moves or there are obstacles in the way.
The system uses a deep learning model to translate the language instructions into the appropriate robot actions. It then uses an advanced motion planning algorithm called "model-predictive control" to continuously update the robot's movements and keep it on track. This closed-loop control allows the robot to be very precise and reliable, even in complex, unstructured environments.
Technical Explanation
The paper presents a language-driven closed-loop grasping system with model-predictive trajectory replanning. The system combines a deep learning model that can map natural language instructions to robot actions, with a model-predictive control algorithm that continuously updates the robot's motion plan based on real-time feedback.
The deep learning model takes in a language command (e.g. "Pick up the red cup on the table") and outputs the corresponding robot end-effector pose and gripper state. This allows the robot to execute task-level instructions in a flexible, adaptable way.
The model-predictive control algorithm then plans a trajectory to achieve that desired end-effector pose, while considering the current state of the robot and environment. It continuously re-plans this trajectory based on feedback from the robot's sensors, allowing the system to adapt to changes and obstacles in real-time.
This closed-loop control enables robust grasping even in cluttered, dynamic environments. The robot can precisely manipulate objects based on high-level language commands, without requiring detailed low-level programming.
Critical Analysis
The paper makes a compelling case for the benefits of combining language-driven robot control with closed-loop trajectory replanning. The experiments demonstrate the system's ability to successfully grasp objects in challenging scenarios, outperforming open-loop approaches.
However, the paper does not fully address the computational and hardware requirements of this approach. The real-time trajectory optimization and sensor feedback processing may require significant computational resources, which could limit the system's deployability on resource-constrained robot platforms.
Additionally, the authors acknowledge that their approach relies on a pre-trained language model and assumes a known object set. Extending the system to handle novel objects or open-vocabulary instructions would likely require further research and development.
Overall, this work represents an important step towards more natural, flexible, and robust robot manipulation capabilities. But there are still opportunities to improve the efficiency, generality, and practical deployment of such language-driven closed-loop control systems.
Conclusion
This paper presents a novel approach to robot grasping that combines language-driven control with real-time trajectory replanning. By integrating a deep learning model for mapping language to robot actions with a model-predictive control algorithm, the system can reliably grasp objects in cluttered, dynamic environments based on high-level instructions.
This research demonstrates the potential for language-driven robotics to enable more intuitive, adaptable, and robust manipulation capabilities. As the field of AI and robotics continues to advance, such language-based control systems could become an increasingly important tool for seamless human-robot interaction and collaboration.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Language Models as Zero-Shot Trajectory Generators
Teyun Kwon, Norman Di Palo, Edward Johns
0
0
Large Language Models (LLMs) have recently shown promise as high-level planners for robots when given access to a selection of low-level skills. However, it is often assumed that LLMs do not possess sufficient knowledge to be used for the low-level trajectories themselves. In this work, we address this assumption thoroughly, and investigate if an LLM (GPT-4) can directly predict a dense sequence of end-effector poses for manipulation tasks, when given access to only object detection and segmentation vision models. We designed a single, task-agnostic prompt, without any in-context examples, motion primitives, or external trajectory optimisers. Then we studied how well it can perform across 30 real-world language-based tasks, such as open the bottle cap and wipe the plate with the sponge, and we investigated which design choices in this prompt are the most important. Our conclusions raise the assumed limit of LLMs for robotics, and we reveal for the first time that LLMs do indeed possess an understanding of low-level robot control sufficient for a range of common tasks, and that they can additionally detect failures and then re-plan trajectories accordingly. Videos, prompts, and code are available at: https://www.robot-learning.uk/language-models-trajectory-generators.
6/19/2024

Closed-Loop Open-Vocabulary Mobile Manipulation with GPT-4V
Peiyuan Zhi, Zhiyuan Zhang, Muzhi Han, Zeyu Zhang, Zhitian Li, Ziyuan Jiao, Baoxiong Jia, Siyuan Huang
0
0
Autonomous robot navigation and manipulation in open environments require reasoning and replanning with closed-loop feedback. We present COME-robot, the first closed-loop framework utilizing the GPT-4V vision-language foundation model for open-ended reasoning and adaptive planning in real-world scenarios. We meticulously construct a library of action primitives for robot exploration, navigation, and manipulation, serving as callable execution modules for GPT-4V in task planning. On top of these modules, GPT-4V serves as the brain that can accomplish multimodal reasoning, generate action policy with code, verify the task progress, and provide feedback for replanning. Such design enables COME-robot to (i) actively perceive the environments, (ii) perform situated reasoning, and (iii) recover from failures. Through comprehensive experiments involving 8 challenging real-world tabletop and manipulation tasks, COME-robot demonstrates a significant improvement in task success rate (~25%) compared to state-of-the-art baseline methods. We further conduct comprehensive analyses to elucidate how COME-robot's design facilitates failure recovery, free-form instruction following, and long-horizon task planning.
4/17/2024

Towards Open-World Grasping with Large Vision-Language Models
Georgios Tziafas, Hamidreza Kasaei
0
0
The ability to grasp objects in-the-wild from open-ended language instructions constitutes a fundamental challenge in robotics. An open-world grasping system should be able to combine high-level contextual with low-level physical-geometric reasoning in order to be applicable in arbitrary scenarios. Recent works exploit the web-scale knowledge inherent in large language models (LLMs) to plan and reason in robotic context, but rely on external vision and action models to ground such knowledge into the environment and parameterize actuation. This setup suffers from two major bottlenecks: a) the LLM's reasoning capacity is constrained by the quality of visual grounding, and b) LLMs do not contain low-level spatial understanding of the world, which is essential for grasping in contact-rich scenarios. In this work we demonstrate that modern vision-language models (VLMs) are capable of tackling such limitations, as they are implicitly grounded and can jointly reason about semantics and geometry. We propose OWG, an open-world grasping pipeline that combines VLMs with segmentation and grasp synthesis models to unlock grounded world understanding in three stages: open-ended referring segmentation, grounded grasp planning and grasp ranking via contact reasoning, all of which can be applied zero-shot via suitable visual prompting mechanisms. We conduct extensive evaluation in cluttered indoor scene datasets to showcase OWG's robustness in grounding from open-ended language, as well as open-world robotic grasping experiments in both simulation and hardware that demonstrate superior performance compared to previous supervised and zero-shot LLM-based methods.
6/28/2024
↗️
Language-Grounded Dynamic Scene Graphs for Interactive Object Search with Mobile Manipulation
Daniel Honerkamp, Martin Buchner, Fabien Despinoy, Tim Welschehold, Abhinav Valada
0
0
To fully leverage the capabilities of mobile manipulation robots, it is imperative that they are able to autonomously execute long-horizon tasks in large unexplored environments. While large language models (LLMs) have shown emergent reasoning skills on arbitrary tasks, existing work primarily concentrates on explored environments, typically focusing on either navigation or manipulation tasks in isolation. In this work, we propose MoMa-LLM, a novel approach that grounds language models within structured representations derived from open-vocabulary scene graphs, dynamically updated as the environment is explored. We tightly interleave these representations with an object-centric action space. Given object detections, the resulting approach is zero-shot, open-vocabulary, and readily extendable to a spectrum of mobile manipulation and household robotic tasks. We demonstrate the effectiveness of MoMa-LLM in a novel semantic interactive search task in large realistic indoor environments. In extensive experiments in both simulation and the real world, we show substantially improved search efficiency compared to conventional baselines and state-of-the-art approaches, as well as its applicability to more abstract tasks. We make the code publicly available at http://moma-llm.cs.uni-freiburg.de.
6/12/2024