Optimal Convex Cover as Collision-free Space Approximation for Trajectory Generation
2406.09631
0
0

Abstract
We propose an online iterative algorithm to find a suitable convex cover to under-approximate the free space for autonomous navigation to delineate Safe Flight Corridors (SFC). The convex cover consists of a set of polytopes such that the union of the polytopes represents obstacle-free space, allowing us to find trajectories for robots that lie within the convex cover. In order to find the SFC that facilitates optimal trajectory generation, we iteratively find overlapping polytopes of maximum volumes that include specified waypoints initialized by a geometric or kinematic planner. Constraints at waypoints appear in two alternating stages of a joint optimization problem, which is solved by a method inspired by the Alternating Direction Method of Multipliers (ADMM) with partially distributed variables. We validate the effectiveness of our proposed algorithm using a range of parameterized environments and show its applications for two-stage motion planning.
Create account to get full access
Overview
- This paper proposes a method for generating collision-free robot trajectories by approximating the collision-free space using an optimal convex cover.
- The approach involves finding the smallest set of convex shapes that cover the obstacle-free regions, which can then be used to efficiently plan trajectories.
- The authors demonstrate the effectiveness of their method through simulations and comparisons to other collision avoidance techniques.
Plain English Explanation
When a robot needs to navigate through a cluttered environment, it must carefully plan its path to avoid colliding with any obstacles. This paper proposes a new method for solving this challenge, called "optimal convex cover".
The key idea is to represent the obstacle-free space using a collection of simple, convex shapes (like boxes or ellipses) that together cover the entire free space. Once we have this representation, we can use it to efficiently plan a collision-free trajectory for the robot to follow.
The researchers developed an algorithm to find the smallest set of convex shapes that can fully cover the obstacle-free regions. This "optimal convex cover" provides a compact and easy-to-use approximation of the free space, which can then be used by other path planning algorithms to quickly generate safe trajectories.
Through simulations, the authors show that their approach outperforms previous methods for collision avoidance and can handle complex environments with many obstacles. The convex cover representation also allows for efficient optimization of the robot's trajectory, further improving the safety and performance.
Overall, this new technique provides a promising solution for enabling robots to navigate safely through cluttered workspaces, with potential applications in autonomous vehicles, industrial robotics, and more.
Technical Explanation
The paper presents a novel approach for robot trajectory generation in cluttered environments, based on the concept of an "optimal convex cover" of the collision-free space.
The key steps of the method are:
- Represent the obstacle geometry using a set of convex shapes (e.g. boxes, ellipses) that collectively cover the obstacle-free regions.
- Formulate an optimization problem to find the smallest set of convex shapes that can fully cover the free space, i.e. the "optimal convex cover".
- Use this compact convex representation of the collision-free space to efficiently plan smooth, collision-free trajectories for the robot.
The authors show that this convex cover approach outperforms previous methods for collision avoidance and trajectory optimization in terms of computational efficiency and solution quality.
Through simulations in 2D and 3D environments with complex obstacle geometries, the proposed method demonstrates its ability to quickly generate smooth, collision-free trajectories. The authors also analyze the trade-offs between the number of convex shapes used in the cover and the resulting trajectory quality.
Overall, the "optimal convex cover" technique provides a promising new direction for safe and efficient robot navigation in cluttered workspaces, with potential applications in autonomous systems and motion planning.
Critical Analysis
The paper presents a well-designed and rigorously evaluated method for robot trajectory generation in cluttered environments. The key strengths of the approach are its computational efficiency, ability to handle complex obstacle geometries, and the smoothness of the resulting trajectories.
However, the authors acknowledge several limitations and areas for further research. First, the method assumes that the obstacle geometry is known a priori, which may not always be the case in real-world scenarios. Extending the approach to handle dynamic or partially-known environments would be an important next step.
Additionally, the paper focuses on single-robot navigation, but many practical applications involve multiple robots or agents operating in the same space. Developing extensions of the "optimal convex cover" technique to handle multi-agent coordination and collision avoidance would be a valuable direction for future work.
While the simulation results are promising, more thorough experimental validation on physical robot platforms would help further demonstrate the feasibility and robustness of the proposed method. Integrating the technique with other motion planning and control modules would also be an interesting area of investigation.
Overall, this paper makes a compelling contribution to the field of robot motion planning and collision avoidance. The "optimal convex cover" concept offers an efficient and principled approach to this important problem, with promising implications for a wide range of autonomous systems applications.
Conclusion
This paper introduces a novel technique for robot trajectory generation in cluttered environments, based on the idea of an "optimal convex cover" of the collision-free space. By representing the free space using a compact set of convex shapes, the method enables efficient trajectory planning and optimization, while still handling complex obstacle geometries.
The authors demonstrate the effectiveness of their approach through extensive simulations, showing that it outperforms previous collision avoidance and trajectory optimization methods. While the method has some limitations, such as the assumption of known obstacle geometry, it offers a promising new direction for safe and efficient robot navigation in challenging environments.
With potential applications in autonomous vehicles, industrial robotics, and other domains, the "optimal convex cover" technique represents an important advancement in the field of motion planning and collision avoidance. As robots continue to play an increasingly vital role in our society, innovations like this will be crucial for enabling them to operate reliably and safely in the real world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

A Novel Optimization-Based Collision Avoidance For Autonomous On-Orbit Assembly
Siavash Tavana, Sepideh Faghihi, Anton de Ruiter, Krishna Dev Kumar
0
0
The collision avoidance constraints are prominent as non-convex, non-differentiable, and challenging when defined in optimization-based motion planning problems. To overcome these issues, this paper presents a novel non-conservative collision avoidance technique using the notion of convex optimization to establish the distance between robotic spacecraft and space structures for autonomous on-orbit assembly operations. The proposed technique defines each ellipsoidal- and polyhedral-shaped object as the union of convex compact sets, each represented non-conservatively by a real-valued convex function. Then, the functions are introduced as a set of constraints to a convex optimization problem to produce a new set of differentiable constraints resulting from the optimality conditions. These new constraints are later fed into an optimal control problem to enforce collision avoidance where the motion planning for the autonomous on-orbit assembly takes place. Numerical experiments for two assembly scenarios in tight environments are presented to demonstrate the capability and effectiveness of the proposed technique. The results show that this framework leads to optimal non-conservative trajectories for robotic spacecraft in tight environments. Although developed for autonomous on-orbit assembly, this technique could be used for any generic motion planning problem where collision avoidance is crucial.
4/16/2024

Collision-Free Trajectory Optimization in Cluttered Environments with Sums-of-Squares Programming
Yulin Li, Chunxin Zheng, Kai Chen, Yusen Xie, Xindong Tang, Michael Yu Wang, Jun Ma
0
0
In this work, we propose a trajectory optimization approach for robot navigation in cluttered 3D environments. We represent the robot's geometry as a semialgebraic set defined by polynomial inequalities such that robots with general shapes can be suitably characterized. To address the robot navigation task in obstacle-dense environments, we exploit the free space directly to construct a sequence of free regions, and allocate each waypoint on the trajectory to a specific region. Then, we incorporate a uniform scaling factor for each free region, and formulate a Sums-of-Squares (SOS) optimization problem that renders the containment relationship between the robot and the free space computationally tractable. The SOS optimization problem is further reformulated to a semidefinite program (SDP), and the collision-free constraints are shown to be equivalent to limiting the scaling factor along the entire trajectory. In this context, the robot at a specific configuration is tailored to stay within the free region. Next, to solve the trajectory optimization problem with the proposed safety constraints (which are implicitly dependent on the robot configurations), we derive the analytical solution to the gradient of the minimum scaling factor with respect to the robot configuration. As a result, this seamlessly facilitates the use of gradient-based methods in efficient solving of the trajectory optimization problem. Through a series of simulations and real-world experiments, the proposed trajectory optimization approach is validated in various challenging scenarios, and the results demonstrate its effectiveness in generating collision-free trajectories in dense and intricate environments populated with obstacles.
4/9/2024

A Convex Formulation of the Soft-Capture Problem
Ibrahima Sory Sow, Geordan Gutow, Howie Choset, Zachary Manchester
0
0
We present a fast trajectory optimization algorithm for the soft capture of uncooperative tumbling space objects. Our algorithm generates safe, dynamically feasible, and minimum-fuel trajectories for a six-degree-of-freedom servicing spacecraft to achieve soft capture (near-zero relative velocity at contact) between predefined locations on the servicer spacecraft and target body. We solve a convex problem by enforcing a convex relaxation of the field-of-view constraint, followed by a sequential convex program correcting the trajectory for collision avoidance. The optimization problems can be solved with a standard second-order cone programming solver, making the algorithm both fast and practical for implementation in flight software. We demonstrate the performance and robustness of our algorithm in simulation over a range of object tumble rates up to 10{deg}/s.
5/3/2024
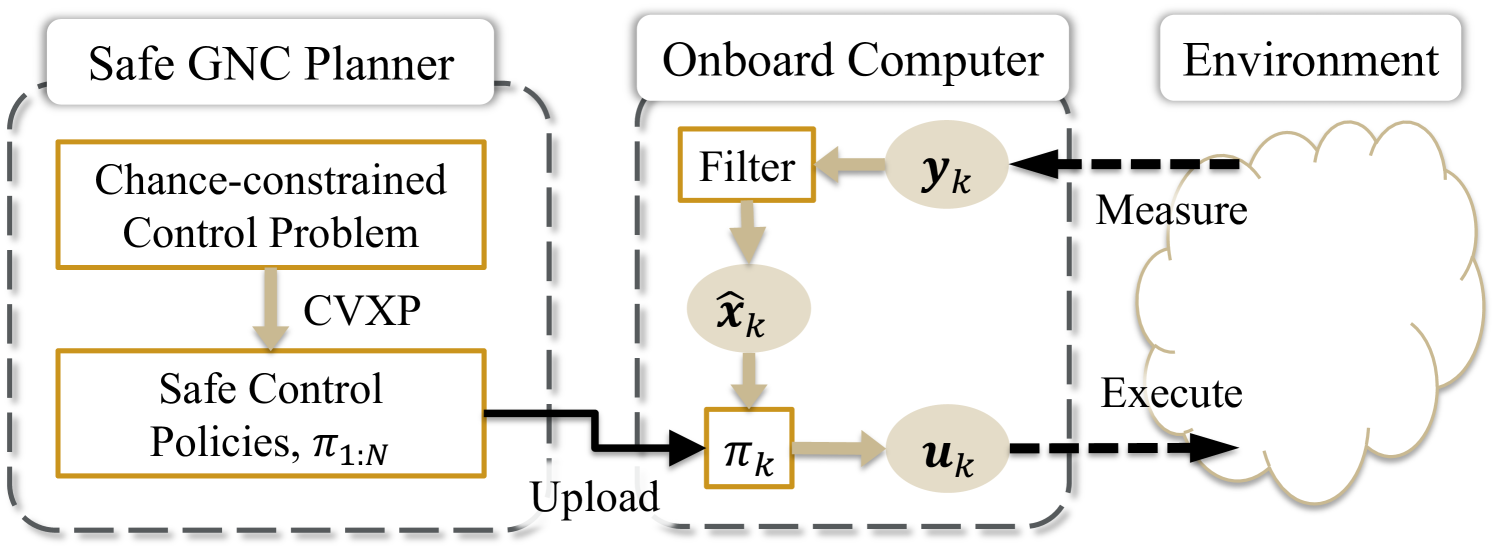
Chance-Constrained Control for Safe Spacecraft Autonomy: Convex Programming Approach
Kenshiro Oguri
0
0
This paper presents a robust path-planning framework for safe spacecraft autonomy under uncertainty and develops a computationally tractable formulation based on convex programming. We utilize chance-constrained control to formulate the problem. It provides a mathematical framework to solve for a sequence of control policies that minimizes a probabilistic cost under probabilistic constraints with a user-defined confidence level (e.g., safety with 99.9% confidence). The framework enables the planner to directly control state distributions under operational uncertainties while ensuring the vehicle safety. This paper rigorously formulates the safe autonomy problem, gathers and extends techniques in literature to accommodate key cost/constraint functions that often arise in spacecraft path planning, and develops a tractable solution method. The presented framework is demonstrated via two representative numerical examples: safe autonomous rendezvous and orbit maintenance in cislunar space, both under uncertainties due to navigation error from Kalman filter, execution error via Gates model, and imperfect force models.
4/19/2024