Optimizing Vehicular Networks with Variational Quantum Circuits-based Reinforcement Learning
2405.18984
0
0
Abstract
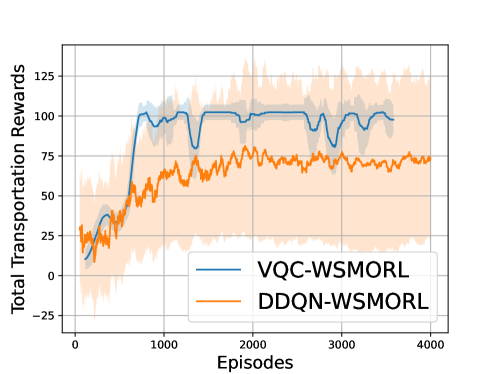
In vehicular networks (VNets), ensuring both road safety and dependable network connectivity is of utmost importance. Achieving this necessitates the creation of resilient and efficient decision-making policies that prioritize multiple objectives. In this paper, we develop a Variational Quantum Circuit (VQC)-based multi-objective reinforcement learning (MORL) framework to characterize efficient network selection and autonomous driving policies in a vehicular network (VNet). Numerical results showcase notable enhancements in both convergence rates and rewards when compared to conventional deep-Q networks (DQNs), validating the efficacy of the VQC-MORL solution.
Create account to get full access
Overview
- This paper explores the use of variational quantum circuits (VQCs) and reinforcement learning (RL) for optimizing vehicular networks.
- The researchers propose a VQC-based RL approach to dynamically allocate resources and make routing decisions in vehicular networks.
- Key techniques used include generalized multi-objective reinforcement learning, Hamiltonian-based quantum RL, and regularization methods for VQCs.
- The goal is to improve the efficiency, reliability, and performance of vehicular networks through this quantum-inspired RL approach.
Plain English Explanation
The paper focuses on improving the performance of vehicular networks, which are communication systems that allow vehicles to exchange data and coordinate with each other. The researchers propose using a combination of variational quantum circuits (VQCs) and reinforcement learning (RL) to optimize how resources are allocated and how vehicles are routed in these networks.
VQCs are a type of quantum computing model that can be trained using RL techniques. RL is a machine learning approach where an agent (in this case, the VQC) learns to make decisions by trial-and-error, receiving rewards or penalties based on the outcomes. By using VQCs and RL together, the researchers aim to dynamically adjust the network configuration to improve efficiency, reliability, and performance.
Some of the key techniques they incorporate include generalized multi-objective RL, which allows the system to balance multiple competing objectives, and Hamiltonian-based quantum RL, which uses quantum physics principles to guide the RL process. They also explore regularization methods to improve the trainability of the VQCs.
The overall goal is to create a more efficient and responsive vehicular network that can adapt to changing conditions and optimize performance across multiple factors, such as data throughput, latency, and reliability.
Technical Explanation
The paper presents a VQC-based RL approach for optimizing vehicular networks. The researchers model the network as a Markov decision process, where the agent (the VQC-based RL system) makes decisions about resource allocation and routing to maximize a reward function.
The VQC is used as the policy network to map the network state to action probabilities. The RL algorithm, which incorporates techniques like generalized multi-objective RL and Hamiltonian-based quantum RL, is used to train the VQC to learn optimal policies.
The researchers also explore several regularization methods to improve the trainability of the VQCs, such as loss function regularization and parameter initialization techniques.
Through simulations, the authors demonstrate that their VQC-based RL approach outperforms traditional RL and optimization algorithms in terms of network performance metrics, such as throughput, latency, and reliability.
Critical Analysis
The paper presents a promising approach for leveraging quantum-inspired techniques to optimize complex vehicular networks. The combination of VQCs and RL offers a flexible and adaptive solution that can dynamically adjust to changing network conditions.
However, the paper does not fully address the scalability of the proposed approach as the size and complexity of the vehicular network increases. The computational overhead of training and deploying the VQC-based RL system may become a bottleneck, especially in large-scale networks.
Additionally, the paper does not discuss the robustness of the system to potential failures or adversarial attacks on the network. Ensuring the reliability and security of the VQC-based RL approach in real-world deployments would be an important area for further research.
Finally, the paper focuses on simulation-based evaluations, and more real-world testing and validation would be needed to assess the practical applicability and performance of the proposed approach in actual vehicular networks.
Conclusion
This paper explores the use of variational quantum circuits and reinforcement learning to optimize the performance of vehicular networks. By combining these quantum-inspired techniques, the researchers develop a dynamic and adaptive system that can allocate resources and make routing decisions to improve network efficiency, reliability, and throughput.
The key contributions include the VQC-based RL framework, the incorporation of advanced RL algorithms like generalized multi-objective RL and Hamiltonian-based quantum RL, and the exploration of regularization methods to enhance the trainability of the VQCs.
While the simulation results are promising, further research is needed to address scalability, robustness, and real-world validation of the proposed approach. Nonetheless, this work represents an exciting step forward in leveraging quantum-inspired techniques to optimize complex communication systems like vehicular networks.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🛠️
A Study on Optimization Techniques for Variational Quantum Circuits in Reinforcement Learning
Michael Kolle, Timo Witter, Tobias Rohe, Gerhard Stenzel, Philipp Altmann, Thomas Gabor
0
0
Quantum Computing aims to streamline machine learning, making it more effective with fewer trainable parameters. This reduction of parameters can speed up the learning process and reduce the use of computational resources. However, in the current phase of quantum computing development, known as the noisy intermediate-scale quantum era (NISQ), learning is difficult due to a limited number of qubits and widespread quantum noise. To overcome these challenges, researchers are focusing on variational quantum circuits (VQCs). VQCs are hybrid algorithms that merge a quantum circuit, which can be adjusted through parameters, with traditional classical optimization techniques. These circuits require only few qubits for effective learning. Recent studies have presented new ways of applying VQCs to reinforcement learning, showing promising results that warrant further exploration. This study investigates the effects of various techniques -- data re-uploading, input scaling, output scaling -- and introduces exponential learning rate decay in the quantum proximal policy optimization algorithm's actor-VQC. We assess these methods in the popular Frozen Lake and Cart Pole environments. Our focus is on their ability to reduce the number of parameters in the VQC without losing effectiveness. Our findings indicate that data re-uploading and an exponential learning rate decay significantly enhance hyperparameter stability and overall performance. While input scaling does not improve parameter efficiency, output scaling effectively manages greediness, leading to increased learning speed and robustness.
5/22/2024
Generalized Multi-Objective Reinforcement Learning with Envelope Updates in URLLC-enabled Vehicular Networks
Zijiang Yan, Hina Tabassum
0
0
We develop a novel multi-objective reinforcement learning (MORL) framework to jointly optimize wireless network selection and autonomous driving policies in a multi-band vehicular network operating on conventional sub-6GHz spectrum and Terahertz frequencies. The proposed framework is designed to 1. maximize the traffic flow and 2. minimize collisions by controlling the vehicle's motion dynamics (i.e., speed and acceleration), and enhance the ultra-reliable low-latency communication (URLLC) while minimizing handoffs (HOs). We cast this problem as a multi-objective Markov Decision Process (MOMDP) and develop solutions for both predefined and unknown preferences of the conflicting objectives. Specifically, deep-Q-network and double deep-Q-network-based solutions are developed first that consider scalarizing the transportation and telecommunication rewards using predefined preferences. We then develop a novel envelope MORL solution which develop policies that address multiple objectives with unknown preferences to the agent. While this approach reduces reliance on scalar rewards, policy effectiveness varying with different preferences is a challenge. To address this, we apply a generalized version of the Bellman equation and optimize the convex envelope of multi-objective Q values to learn a unified parametric representation capable of generating optimal policies across all possible preference configurations. Following an initial learning phase, our agent can execute optimal policies under any specified preference or infer preferences from minimal data samples.Numerical results validate the efficacy of the envelope-based MORL solution and demonstrate interesting insights related to the inter-dependency of vehicle motion dynamics, HOs, and the communication data rate. The proposed policies enable autonomous vehicles to adopt safe driving behaviors with improved connectivity.
5/21/2024
🤿
Quantum Deep Reinforcement Learning for Robot Navigation Tasks
Hans Hohenfeld, Dirk Heimann, Felix Wiebe, Frank Kirchner
0
0
We utilize hybrid quantum deep reinforcement learning to learn navigation tasks for a simple, wheeled robot in simulated environments of increasing complexity. For this, we train parameterized quantum circuits (PQCs) with two different encoding strategies in a hybrid quantum-classical setup as well as a classical neural network baseline with the double deep Q network (DDQN) reinforcement learning algorithm. Quantum deep reinforcement learning (QDRL) has previously been studied in several relatively simple benchmark environments, mainly from the OpenAI gym suite. However, scaling behavior and applicability of QDRL to more demanding tasks closer to real-world problems e. g., from the robotics domain, have not been studied previously. Here, we show that quantum circuits in hybrid quantum-classic reinforcement learning setups are capable of learning optimal policies in multiple robotic navigation scenarios with notably fewer trainable parameters compared to a classical baseline. Across a large number of experimental configurations, we find that the employed quantum circuits outperform the classical neural network baselines when equating for the number of trainable parameters. Yet, the classical neural network consistently showed better results concerning training times and stability, with at least one order of magnitude of trainable parameters more than the best-performing quantum circuits. However, validating the robustness of the learning methods in a large and dynamic environment, we find that the classical baseline produces more stable and better performing policies overall.
6/26/2024
DNN Partitioning, Task Offloading, and Resource Allocation in Dynamic Vehicular Networks: A Lyapunov-Guided Diffusion-Based Reinforcement Learning Approach
Zhang Liu, Hongyang Du, Junzhe Lin, Zhibin Gao, Lianfen Huang, Seyyedali Hosseinalipour, Dusit Niyato
0
0
The rapid advancement of Artificial Intelligence (AI) has introduced Deep Neural Network (DNN)-based tasks to the ecosystem of vehicular networks. These tasks are often computation-intensive, requiring substantial computation resources, which are beyond the capability of a single vehicle. To address this challenge, Vehicular Edge Computing (VEC) has emerged as a solution, offering computing services for DNN-based tasks through resource pooling via Vehicle-to-Vehicle/Infrastructure (V2V/V2I) communications. In this paper, we formulate the problem of joint DNN partitioning, task offloading, and resource allocation in VEC as a dynamic long-term optimization. Our objective is to minimize the DNN-based task completion time while guaranteeing the system stability over time. To this end, we first leverage a Lyapunov optimization technique to decouple the original long-term optimization with stability constraints into a per-slot deterministic problem. Afterwards, we propose a Multi-Agent Diffusion-based Deep Reinforcement Learning (MAD2RL) algorithm, incorporating the innovative use of diffusion models to determine the optimal DNN partitioning and task offloading decisions. Furthermore, we integrate convex optimization techniques into MAD2RL as a subroutine to allocate computation resources, enhancing the learning efficiency. Through simulations under real-world movement traces of vehicles, we demonstrate the superior performance of our proposed algorithm compared to existing benchmark solutions.
6/12/2024