Quantum Deep Reinforcement Learning for Robot Navigation Tasks
2202.12180
0
0
🤿
Abstract
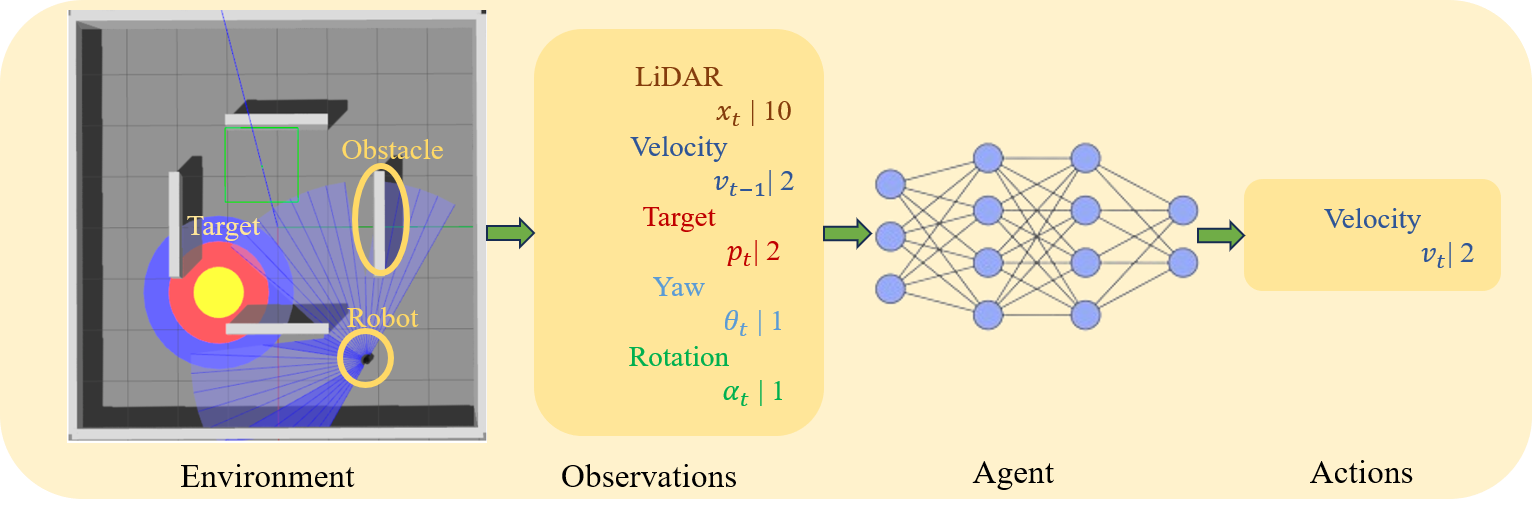
We utilize hybrid quantum deep reinforcement learning to learn navigation tasks for a simple, wheeled robot in simulated environments of increasing complexity. For this, we train parameterized quantum circuits (PQCs) with two different encoding strategies in a hybrid quantum-classical setup as well as a classical neural network baseline with the double deep Q network (DDQN) reinforcement learning algorithm. Quantum deep reinforcement learning (QDRL) has previously been studied in several relatively simple benchmark environments, mainly from the OpenAI gym suite. However, scaling behavior and applicability of QDRL to more demanding tasks closer to real-world problems e. g., from the robotics domain, have not been studied previously. Here, we show that quantum circuits in hybrid quantum-classic reinforcement learning setups are capable of learning optimal policies in multiple robotic navigation scenarios with notably fewer trainable parameters compared to a classical baseline. Across a large number of experimental configurations, we find that the employed quantum circuits outperform the classical neural network baselines when equating for the number of trainable parameters. Yet, the classical neural network consistently showed better results concerning training times and stability, with at least one order of magnitude of trainable parameters more than the best-performing quantum circuits. However, validating the robustness of the learning methods in a large and dynamic environment, we find that the classical baseline produces more stable and better performing policies overall.
Create account to get full access
Overview
- The researchers use a hybrid quantum-classical approach to train parameterized quantum circuits (PQCs) for learning navigation tasks in simulated robotic environments.
- They compare the performance of the quantum circuits to a classical neural network baseline using the double deep Q-network (DDQN) reinforcement learning algorithm.
- The goal is to assess the scalability and applicability of quantum deep reinforcement learning (QDRL) to more complex, real-world-inspired robotic scenarios beyond simple benchmark environments.
Plain English Explanation
The researchers are exploring the use of quantum computers to help robots learn how to navigate through simulated environments. They're training special quantum circuits, called parameterized quantum circuits (PQCs), to control a simple wheeled robot as it moves around. They're comparing the performance of these quantum circuits to a classical neural network that's also learning to control the robot using a reinforcement learning technique called double deep Q-network (DDQN).
The key idea is to see if quantum computers can learn these navigation tasks more efficiently than classical computers, using fewer trainable parameters. Previous research on quantum deep reinforcement learning (QDRL) has only looked at simple, standard benchmark environments, so the researchers want to see how well it scales to more complex, real-world-inspired scenarios like those found in robotics.
Technical Explanation
The researchers train their PQCs using a hybrid quantum-classical setup, where the quantum circuit interacts with a classical reinforcement learning algorithm. They explore two different encoding strategies for the PQCs and compare their performance to a classical DDQN neural network baseline.
The researchers test the learning methods across a variety of increasingly complex simulated robotic navigation environments, going beyond the standard OpenAI Gym benchmarks. This allows them to assess the scalability and real-world applicability of QDRL.
Their results show that the quantum circuits are able to learn optimal navigation policies with notably fewer trainable parameters compared to the classical neural network baseline. However, the classical network consistently performs better in terms of training time and stability, requiring at least an order of magnitude more trainable parameters than the best-performing quantum circuits.
When evaluating the robustness of the learned policies in a large, dynamic environment, the researchers find that the classical baseline produces more stable and higher-performing results overall.
Critical Analysis
The paper provides a comprehensive evaluation of the strengths and limitations of the hybrid quantum-classical approach compared to a classical reinforcement learning method. The researchers acknowledge that while the quantum circuits can learn with fewer parameters, the classical network still outperforms them in terms of training time, stability, and overall policy quality, especially in more complex environments.
This suggests that current quantum hardware and training techniques may not yet be sufficient to fully outperform classical methods on challenging, real-world-inspired tasks, at least in the context of mobile robot navigation. The researchers also note that the overhead of setting up and running the quantum circuits may offset some of the potential parameter efficiency gains.
Further research is needed to improve the scalability and robustness of QDRL, potentially by exploring more advanced quantum hardware and software techniques or by combining quantum and classical approaches in more nuanced ways.
Conclusion
This study provides valuable insights into the current capabilities and limitations of using hybrid quantum-classical reinforcement learning for complex robotic navigation tasks. While the quantum circuits demonstrate impressive parameter efficiency, the classical neural network approach still outperforms them in terms of training time, stability, and overall policy quality, especially in large, dynamic environments.
The research highlights the need for continued advancements in quantum hardware and training techniques to fully realize the potential of QDRL for real-world applications. As the field progresses, the integration of quantum and classical methods may lead to even more powerful and versatile reinforcement learning solutions for robotics and beyond.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Aquatic Navigation: A Challenging Benchmark for Deep Reinforcement Learning
Davide Corsi, Davide Camponogara, Alessandro Farinelli
0
0
An exciting and promising frontier for Deep Reinforcement Learning (DRL) is its application to real-world robotic systems. While modern DRL approaches achieved remarkable successes in many robotic scenarios (including mobile robotics, surgical assistance, and autonomous driving) unpredictable and non-stationary environments can pose critical challenges to such methods. These features can significantly undermine fundamental requirements for a successful training process, such as the Markovian properties of the transition model. To address this challenge, we propose a new benchmarking environment for aquatic navigation using recent advances in the integration between game engines and DRL. In more detail, we show that our benchmarking environment is problematic even for state-of-the-art DRL approaches that may struggle to generate reliable policies in terms of generalization power and safety. Specifically, we focus on PPO, one of the most widely accepted algorithms, and we propose advanced training techniques (such as curriculum learning and learnable hyperparameters). Our extensive empirical evaluation shows that a well-designed combination of these ingredients can achieve promising results. Our simulation environment and training baselines are freely available to facilitate further research on this open problem and encourage collaboration in the field.
6/3/2024
🤿
Deep Reinforcement Learning for Mobile Robot Path Planning
Hao Liu, Yi Shen, Shuangjiang Yu, Zijun Gao, Tong Wu
0
0
Path planning is an important problem with the the applications in many aspects, such as video games, robotics etc. This paper proposes a novel method to address the problem of Deep Reinforcement Learning (DRL) based path planning for a mobile robot. We design DRL-based algorithms, including reward functions, and parameter optimization, to avoid time-consuming work in a 2D environment. We also designed an Two-way search hybrid A* algorithm to improve the quality of local path planning. We transferred the designed algorithm to a simple embedded environment to test the computational load of the algorithm when running on a mobile robot. Experiments show that when deployed on a robot platform, the DRL-based algorithm in this article can achieve better planning results and consume less computing resources.
4/11/2024
🏅
Hamiltonian-based Quantum Reinforcement Learning for Neural Combinatorial Optimization
Georg Kruse, Rodrigo Coehlo, Andreas Rosskopf, Robert Wille, Jeanette Miriam Lorenz
0
0
Advancements in Quantum Computing (QC) and Neural Combinatorial Optimization (NCO) represent promising steps in tackling complex computational challenges. On the one hand, Variational Quantum Algorithms such as QAOA can be used to solve a wide range of combinatorial optimization problems. On the other hand, the same class of problems can be solved by NCO, a method that has shown promising results, particularly since the introduction of Graph Neural Networks. Given recent advances in both research areas, we introduce Hamiltonian-based Quantum Reinforcement Learning (QRL), an approach at the intersection of QC and NCO. We model our ansatzes directly on the combinatorial optimization problem's Hamiltonian formulation, which allows us to apply our approach to a broad class of problems. Our ansatzes show favourable trainability properties when compared to the hardware efficient ansatzes, while also not being limited to graph-based problems, unlike previous works. In this work, we evaluate the performance of Hamiltonian-based QRL on a diverse set of combinatorial optimization problems to demonstrate the broad applicability of our approach and compare it to QAOA.
5/14/2024
Deep Reinforcement Learning with Enhanced PPO for Safe Mobile Robot Navigation
Hamid Taheri, Seyed Rasoul Hosseini
0
0
Collision-free motion is essential for mobile robots. Most approaches to collision-free and efficient navigation with wheeled robots require parameter tuning by experts to obtain good navigation behavior. This study investigates the application of deep reinforcement learning to train a mobile robot for autonomous navigation in a complex environment. The robot utilizes LiDAR sensor data and a deep neural network to generate control signals guiding it toward a specified target while avoiding obstacles. We employ two reinforcement learning algorithms in the Gazebo simulation environment: Deep Deterministic Policy Gradient and proximal policy optimization. The study introduces an enhanced neural network structure in the Proximal Policy Optimization algorithm to boost performance, accompanied by a well-designed reward function to improve algorithm efficacy. Experimental results conducted in both obstacle and obstacle-free environments underscore the effectiveness of the proposed approach. This research significantly contributes to the advancement of autonomous robotics in complex environments through the application of deep reinforcement learning.
5/28/2024