Organized Grouped Discrete Representation for Object-Centric Learning

0
🏋️
Sign in to get full access
Overview
- Object-Centric Learning (OCL) represents dense image or video pixels as sparse object features
- Uses discrete representation composed of Variational Autoencoder (VAE) template features to reduce pixel-level redundancy and guide object-level feature aggregation
- Grouped Discrete Representation (GDR) decomposes these template features into attributes, but its naive channel grouping can erroneously group different attributes together
Plain English Explanation
Object-Centric Learning is a way to represent dense image or video data using sparse object features. The key idea is to use a Variational Autoencoder (VAE) to extract a discrete set of template features that can capture the essential information about objects in the image or video, while suppressing the redundant pixel-level details.
Grouped Discrete Representation (GDR) builds on this by further decomposing the template features into smaller attribute-level features. However, the way GDR groups the channels (features) into these attributes can sometimes be incorrect, leading to a loss of information and reduced expressiveness.
Technical Explanation
The proposed Organized GDR (OGDR) method aims to address this issue by organizing the channels belonging to the same attributes together, ensuring a correct decomposition from the template features into the attribute-level features.
In unsupervised segmentation experiments, OGDR is shown to be superior to GDR in improving the performance of classical transformer-based OCL methods, and it even enhances state-of-the-art diffusion-based approaches. Further analysis of the codebook PCA and representation similarity reveals that OGDR better eliminates redundancy and preserves information compared to GDR, leading to more effective object representation learning.
Critical Analysis
While the paper presents a compelling approach to improving object-centric representation learning, it would be helpful to see more discussion of the limitations or potential drawbacks of the OGDR method. For example, the authors could explore how the method might perform in more challenging or diverse datasets, or how sensitive it is to hyperparameter choices. Additionally, the paper could delve deeper into the trade-offs between the increased expressiveness of the OGDR representation and its computational efficiency or memory footprint.
Conclusion
Object-Centric Learning is a promising approach for representing complex visual data in a more structured and efficient manner, and the Organized GDR method presented in this paper represents an important advancement in this field. By organizing the decomposition of template features into attributes more effectively, OGDR can enhance the performance of various OCL models and lead to better object representation learning. Further research into the limitations and potential applications of this technique could help unlock its full potential for a wide range of computer vision tasks.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏋️
0
Organized Grouped Discrete Representation for Object-Centric Learning
Rongzhen Zhao, Vivienne Wang, Juho Kannala, Joni Pajarinen
Object-Centric Learning (OCL) represents dense image or video pixels as sparse object features. Representative methods utilize discrete representation composed of Variational Autoencoder (VAE) template features to suppress pixel-level information redundancy and guide object-level feature aggregation. The most recent advancement, Grouped Discrete Representation (GDR), further decomposes these template features into attributes. However, its naive channel grouping as decomposition may erroneously group channels belonging to different attributes together and discretize them as sub-optimal template attributes, which losses information and harms expressivity. We propose Organized GDR (OGDR) to organize channels belonging to the same attributes together for correct decomposition from features into attributes. In unsupervised segmentation experiments, OGDR is fully superior to GDR in augmentating classical transformer-based OCL methods; it even improves state-of-the-art diffusion-based ones. Codebook PCA and representation similarity analyses show that compared with GDR, our OGDR eliminates redundancy and preserves information better for guiding object representation learning. The source code is available in the supplementary material.
Read more9/12/2024

0
Learning Object-Centric Representation via Reverse Hierarchy Guidance
Junhong Zou, Xiangyu Zhu, Zhaoxiang Zhang, Zhen Lei
Object-Centric Learning (OCL) seeks to enable Neural Networks to identify individual objects in visual scenes, which is crucial for interpretable visual comprehension and reasoning. Most existing OCL models adopt auto-encoding structures and learn to decompose visual scenes through specially designed inductive bias, which causes the model to miss small objects during reconstruction. Reverse hierarchy theory proposes that human vision corrects perception errors through a top-down visual pathway that returns to bottom-level neurons and acquires more detailed information, inspired by which we propose Reverse Hierarchy Guided Network (RHGNet) that introduces a top-down pathway that works in different ways in the training and inference processes. This pathway allows for guiding bottom-level features with top-level object representations during training, as well as encompassing information from bottom-level features into perception during inference. Our model achieves SOTA performance on several commonly used datasets including CLEVR, CLEVRTex and MOVi-C. We demonstrate with experiments that our method promotes the discovery of small objects and also generalizes well on complex real-world scenes. Code will be available at https://anonymous.4open.science/r/RHGNet-6CEF.
Read more5/20/2024

0
Learning Disentangled Representation in Object-Centric Models for Visual Dynamics Prediction via Transformers
Sanket Gandhi, Atul, Samanyu Mahajan, Vishal Sharma, Rushil Gupta, Arnab Kumar Mondal, Parag Singla
Recent work has shown that object-centric representations can greatly help improve the accuracy of learning dynamics while also bringing interpretability. In this work, we take this idea one step further, ask the following question: can learning disentangled representation further improve the accuracy of visual dynamics prediction in object-centric models? While there has been some attempt to learn such disentangled representations for the case of static images citep{nsb}, to the best of our knowledge, ours is the first work which tries to do this in a general setting for video, without making any specific assumptions about the kind of attributes that an object might have. The key building block of our architecture is the notion of a {em block}, where several blocks together constitute an object. Each block is represented as a linear combination of a given number of learnable concept vectors, which is iteratively refined during the learning process. The blocks in our model are discovered in an unsupervised manner, by attending over object masks, in a style similar to discovery of slots citep{slot_attention}, for learning a dense object-centric representation. We employ self-attention via transformers over the discovered blocks to predict the next state resulting in discovery of visual dynamics. We perform a series of experiments on several benchmark 2-D, and 3-D datasets demonstrating that our architecture (1) can discover semantically meaningful blocks (2) help improve accuracy of dynamics prediction compared to SOTA object-centric models (3) perform significantly better in OOD setting where the specific attribute combinations are not seen earlier during training. Our experiments highlight the importance discovery of disentangled representation for visual dynamics prediction.
Read more7/4/2024
0
Self-Supervised Video Representation Learning in a Heuristic Decoupled Perspective
Zeen Song, Jingyao Wang, Jianqi Zhang, Changwen Zheng, Wenwen Qiang
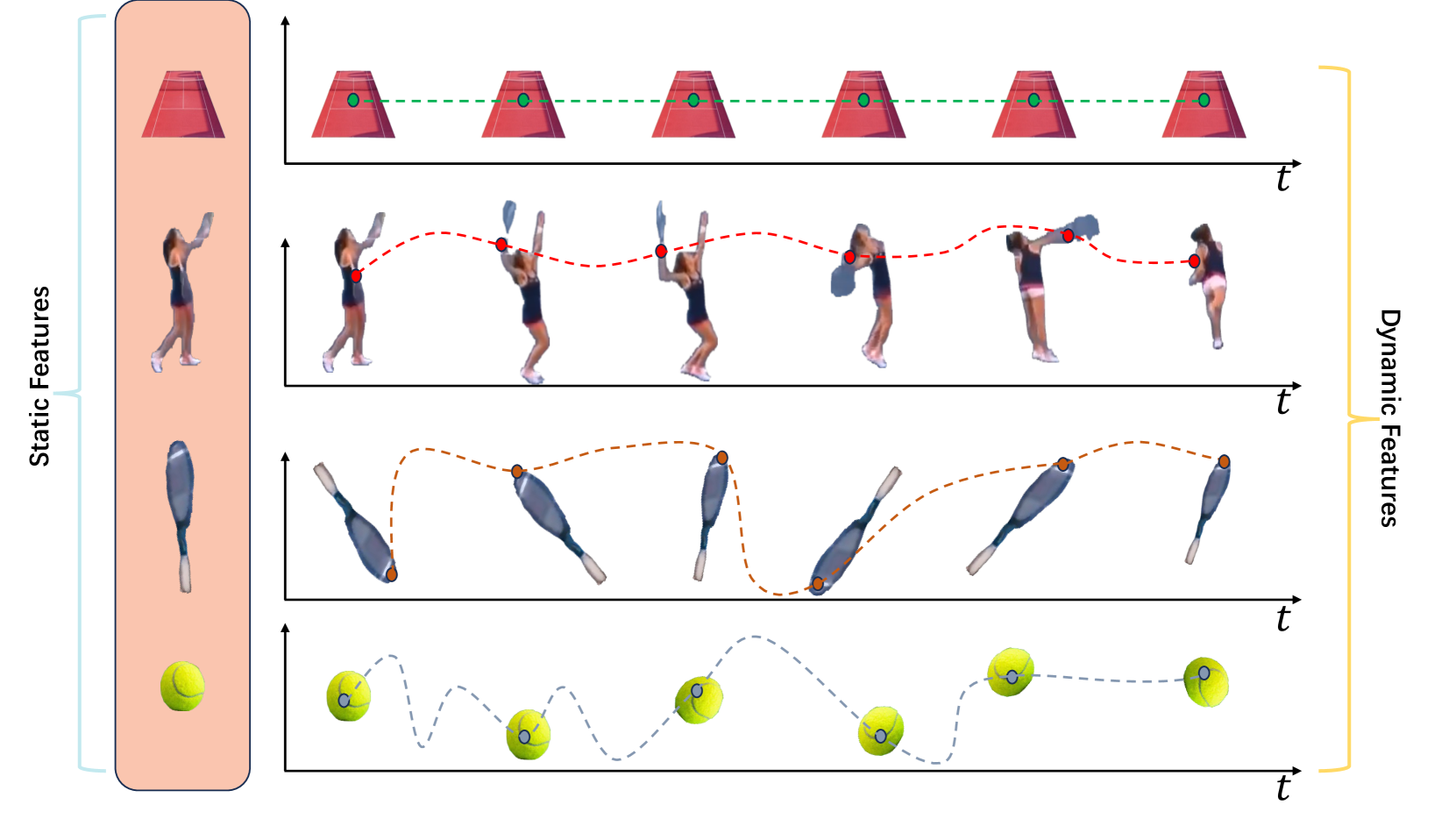
Video contrastive learning (v-CL) has gained prominence as a leading framework for unsupervised video representation learning, showcasing impressive performance across various tasks such as action classification and detection. In the field of video representation learning, a feature extractor should ideally capture both static and dynamic semantics. However, our series of experiments reveals that existing v-CL methods predominantly capture static semantics, with limited capturing of dynamic semantics. Through causal analysis, we identify the root cause: the v-CL objective lacks explicit modeling of dynamic features and the measurement of dynamic similarity is confounded by static semantics, while the measurement of static similarity is confounded by dynamic semantics. In response, we propose Bi-level Optimization of Learning Dynamic with Decoupling and Intervention (BOLD-DI) to capture both static and dynamic semantics in a decoupled manner. Our method can be seamlessly integrated into the existing v-CL methods and experimental results highlight the significant improvements.
Read more7/22/2024