Outdoor Scene Extrapolation with Hierarchical Generative Cellular Automata

0
Sign in to get full access
Overview
- This paper presents a novel approach for extrapolating outdoor scenes using a hierarchical generative cellular automata model.
- The proposed technique can generate plausible extensions of partial outdoor scenes, such as landscapes, terrains, and vegetation.
- The model leverages a hierarchical structure to capture long-range dependencies and generate coherent scene elements at multiple scales.
Plain English Explanation
The researchers have developed a new way to expand and fill in the missing parts of outdoor scenes, like landscapes, terrain, and plants. Their model uses a special type of AI called a "hierarchical generative cellular automata" to generate realistic-looking extensions of partial scenes.
The key idea is to have a multilayered or "hierarchical" structure that can capture the large-scale patterns and relationships in the scene. This allows the model to generate coherent and plausible additions, rather than just random or disconnected elements.
For example, if you have a partial view of a mountainous landscape, the model could intelligently extend the terrain, add appropriate vegetation, and maintain the overall visual coherence of the scene. This could be useful for applications like computer graphics, virtual environments, and even urban planning.
Technical Explanation
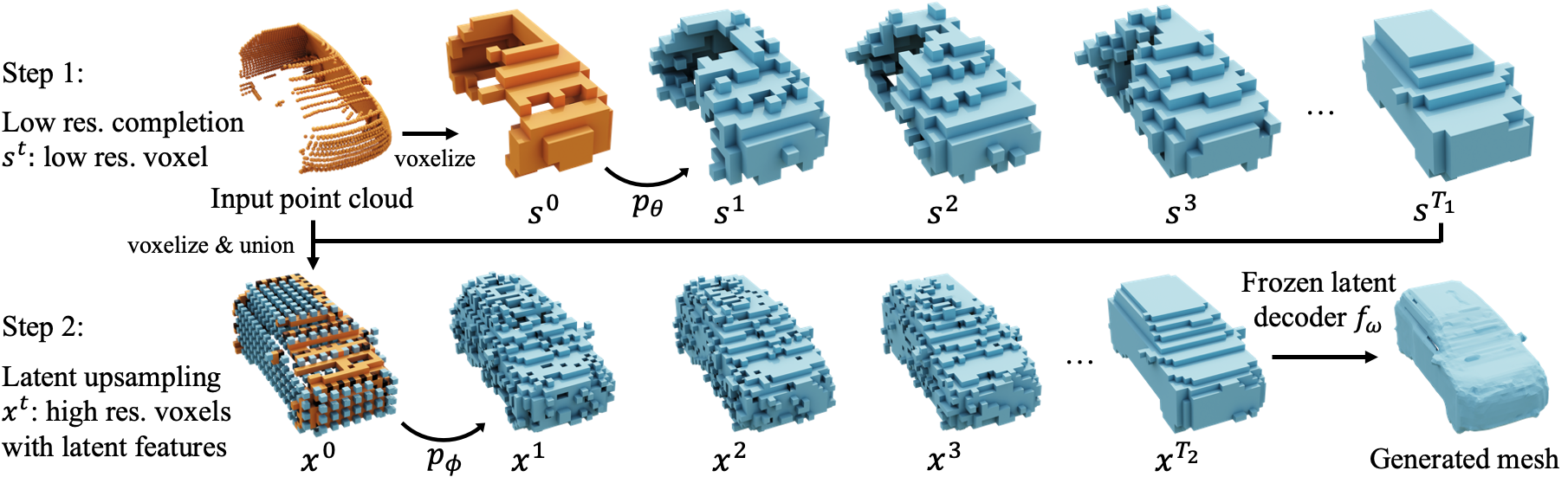
The authors propose a Hierarchical Generative Cellular Automata (HGCA) model for outdoor scene extrapolation. The HGCA architecture consists of multiple interconnected layers, each of which is a Generative Cellular Automata (GCA) model.
The lower layers of the HGCA capture local, fine-grained scene elements, while the higher layers model the long-range, coarse-grained relationships between scene components. This hierarchical structure allows the model to generate plausible scene extensions by propagating information bidirectionally across the layers.
The authors train the HGCA in an unsupervised manner using a scene graph-based generative approach. This enables the model to learn the underlying structure and dependencies present in outdoor scenes without requiring manually labeled data.
Experiments show that the HGCA outperforms state-of-the-art generative adversarial imitation learning and end-to-end generative models for outdoor scene extrapolation, generating coherent and plausible scene extensions.
Critical Analysis
The paper presents a compelling approach for generating realistic outdoor scene extensions. The hierarchical structure of the HGCA model allows it to capture long-range dependencies and produce visually coherent results, which is a significant advantage over previous techniques.
However, the paper does not address certain limitations. For example, the model may struggle to handle highly diverse or complex outdoor scenes, as the training process relies on scene graph representations that may not fully capture all the nuances of real-world environments.
Additionally, the paper does not discuss the computational complexity and runtime performance of the HGCA model, which could be an important consideration for practical applications. Further research is needed to understand the scalability and efficiency of the proposed approach.
Overall, the paper makes a valuable contribution to the field of computer graphics and scene generation. The HGCA model represents a promising step towards more advanced and versatile outdoor scene extrapolation techniques.
Conclusion
This paper introduces a novel Hierarchical Generative Cellular Automata (HGCA) model for extrapolating and extending outdoor scenes. The hierarchical structure of the HGCA allows it to capture long-range dependencies and generate coherent, plausible scene extensions, outperforming previous state-of-the-art approaches.
The proposed technique has the potential to significantly impact applications such as computer graphics, virtual environments, and even urban planning, where the ability to realistically expand and fill in missing parts of outdoor scenes is highly valuable. While the paper highlights some limitations, the HGCA model represents an important advancement in the field of scene generation and synthesis.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Outdoor Scene Extrapolation with Hierarchical Generative Cellular Automata
Dongsu Zhang, Francis Williams, Zan Gojcic, Karsten Kreis, Sanja Fidler, Young Min Kim, Amlan Kar
We aim to generate fine-grained 3D geometry from large-scale sparse LiDAR scans, abundantly captured by autonomous vehicles (AV). Contrary to prior work on AV scene completion, we aim to extrapolate fine geometry from unlabeled and beyond spatial limits of LiDAR scans, taking a step towards generating realistic, high-resolution simulation-ready 3D street environments. We propose hierarchical Generative Cellular Automata (hGCA), a spatially scalable conditional 3D generative model, which grows geometry recursively with local kernels following, in a coarse-to-fine manner, equipped with a light-weight planner to induce global consistency. Experiments on synthetic scenes show that hGCA generates plausible scene geometry with higher fidelity and completeness compared to state-of-the-art baselines. Our model generalizes strongly from sim-to-real, qualitatively outperforming baselines on the Waymo-open dataset. We also show anecdotal evidence of the ability to create novel objects from real-world geometric cues even when trained on limited synthetic content. More results and details can be found on https://research.nvidia.com/labs/toronto-ai/hGCA/.
Read more6/13/2024

0
An Organism Starts with a Single Pix-Cell: A Neural Cellular Diffusion for High-Resolution Image Synthesis
Marawan Elbatel, Konstantinos Kamnitsas, Xiaomeng Li
Generative modeling seeks to approximate the statistical properties of real data, enabling synthesis of new data that closely resembles the original distribution. Generative Adversarial Networks (GANs) and Denoising Diffusion Probabilistic Models (DDPMs) represent significant advancements in generative modeling, drawing inspiration from game theory and thermodynamics, respectively. Nevertheless, the exploration of generative modeling through the lens of biological evolution remains largely untapped. In this paper, we introduce a novel family of models termed Generative Cellular Automata (GeCA), inspired by the evolution of an organism from a single cell. GeCAs are evaluated as an effective augmentation tool for retinal disease classification across two imaging modalities: Fundus and Optical Coherence Tomography (OCT). In the context of OCT imaging, where data is scarce and the distribution of classes is inherently skewed, GeCA significantly boosts the performance of 11 different ophthalmological conditions, achieving a 12% increase in the average F1 score compared to conventional baselines. GeCAs outperform both diffusion methods that incorporate UNet or state-of-the art variants with transformer-based denoising models, under similar parameter constraints. Code is available at: https://github.com/xmed-lab/GeCA.
Read more7/4/2024
👁️
0
Generating 3D Terrain with 2D Cellular Automata
Nuno Fachada, Ant'onio R. Rodrigues, Diogo de Andrade, Phil Lopes
This paper presents an initial exploration on the use of 2D cellular automata (CA) for generating 3D terrains through a simple yet effective additive approach. By experimenting with multiple CA transition rules, this preliminary investigation yielded aesthetically interesting landscapes, hinting at the technique's potential applicability for real-time terrain generation in games.
Read more6/4/2024

0
Street Gaussians: Modeling Dynamic Urban Scenes with Gaussian Splatting
Yunzhi Yan, Haotong Lin, Chenxu Zhou, Weijie Wang, Haiyang Sun, Kun Zhan, Xianpeng Lang, Xiaowei Zhou, Sida Peng
This paper aims to tackle the problem of modeling dynamic urban streets for autonomous driving scenes. Recent methods extend NeRF by incorporating tracked vehicle poses to animate vehicles, enabling photo-realistic view synthesis of dynamic urban street scenes. However, significant limitations are their slow training and rendering speed. We introduce Street Gaussians, a new explicit scene representation that tackles these limitations. Specifically, the dynamic urban scene is represented as a set of point clouds equipped with semantic logits and 3D Gaussians, each associated with either a foreground vehicle or the background. To model the dynamics of foreground object vehicles, each object point cloud is optimized with optimizable tracked poses, along with a 4D spherical harmonics model for the dynamic appearance. The explicit representation allows easy composition of object vehicles and background, which in turn allows for scene editing operations and rendering at 135 FPS (1066 $times$ 1600 resolution) within half an hour of training. The proposed method is evaluated on multiple challenging benchmarks, including KITTI and Waymo Open datasets. Experiments show that the proposed method consistently outperforms state-of-the-art methods across all datasets. The code will be released to ensure reproducibility.
Read more8/20/2024