Outlier-robust Kalman Filtering through Generalised Bayes

0
Sign in to get full access
Overview
- The paper presents a method for robust Kalman filtering in the presence of outliers and data corruption.
- It introduces a generalized Bayes framework that can handle various types of noise distributions beyond the typical Gaussian assumption.
- The proposed approach is shown to outperform standard Kalman filtering and other robust techniques on both simulated and real-world data.
Plain English Explanation
The Kalman filter is a powerful algorithm used to estimate the state of a system over time based on noisy measurements. However, the standard Kalman filter assumes the noise follows a normal (Gaussian) distribution, which may not always be the case in real-world scenarios.
This paper presents a new approach called "Outlier-robust Kalman Filtering through Generalized Bayes" that can handle more complex types of noise, including outliers and data corruption. The key idea is to use a more flexible "generalized Bayes" framework that allows the noise distribution to take different forms, rather than being restricted to the Gaussian assumption.
By relaxing this assumption, the method can better cope with unusual or unexpected measurements that would otherwise be treated as noise and distort the state estimate. The authors demonstrate through experiments on both simulated and real-world data that their approach outperforms the standard Kalman filter as well as other robust filtering techniques.
This research is important because many real-world systems, such as robotics or sensor networks, can be subject to outliers or non-Gaussian noise. By having a more flexible and robust filtering method, it becomes possible to better track the true state of the system in the presence of such challenges.
Technical Explanation
The paper presents a new approach for Kalman filtering in state-space models (SSMs) that can handle outliers and non-Gaussian noise. It introduces a generalized Bayes framework that allows the noise distribution to take a wider range of forms beyond the typical Gaussian assumption.
The key technical innovation is the use of a generalized likelihood function that can accommodate different noise models, such as heavy-tailed distributions or mixtures of Gaussians. This enables the filter to be more robust to outliers and other forms of data corruption that would otherwise distort the state estimate under the standard Kalman filtering approach.
The paper provides a detailed derivation of the generalized Bayes filtering algorithm, including the recursive update equations for the state mean and covariance. Experiments on both simulated and real-world datasets, including a robotic localization task and a time series forecasting problem, demonstrate the improved performance of the proposed method compared to the standard Kalman filter as well as other robust filtering techniques like the M-estimator Kalman filter and the Huber Kalman filter.
Critical Analysis
The paper presents a well-designed and thorough evaluation of the proposed generalized Bayes Kalman filtering approach. The experiments cover a range of synthetic and real-world datasets, providing a comprehensive assessment of the method's performance.
One potential limitation mentioned by the authors is the computational overhead associated with the generalized likelihood function, which can be more expensive to evaluate than the standard Gaussian likelihood. This may be a concern for applications with strict real-time requirements or limited computational resources.
Additionally, the paper does not extensively explore the sensitivity of the method to the choice of the generalized noise model or its hyperparameters. Further research could investigate the robustness of the approach to misspecification of the noise distribution or the impact of different parameterizations on the filtering performance.
Another area for future work could be to extend the generalized Bayes framework to handle more complex state-space models, such as those with non-linear dynamics or non-Gaussian state distributions. Adapting the method to these more challenging scenarios would further demonstrate its flexibility and broader applicability.
Conclusion
This paper presents a novel approach to Kalman filtering that can handle outliers and non-Gaussian noise through the use of a generalized Bayes framework. By relaxing the typical Gaussian assumption, the proposed method is shown to outperform standard Kalman filtering and other robust techniques on both simulated and real-world datasets.
The research is significant because many real-world systems, from robotics to sensor networks, can be subject to unusual noise and measurement errors that can degrade the performance of standard filtering algorithms. The generalized Bayes Kalman filter provides a more flexible and robust solution to this problem, with the potential to improve state estimation and tracking in a variety of applications.
While the method does incur some additional computational overhead, the significant gains in filtering performance demonstrated in the paper suggest that it is a promising direction for further development and exploration. Extending the approach to handle more complex state-space models and investigating its sensitivity to the choice of noise model are potential avenues for future research.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Outlier-robust Kalman Filtering through Generalised Bayes
Gerardo Duran-Martin, Matias Altamirano, Alexander Y. Shestopaloff, Leandro S'anchez-Betancourt, Jeremias Knoblauch, Matt Jones, Franc{c}ois-Xavier Briol, Kevin Murphy
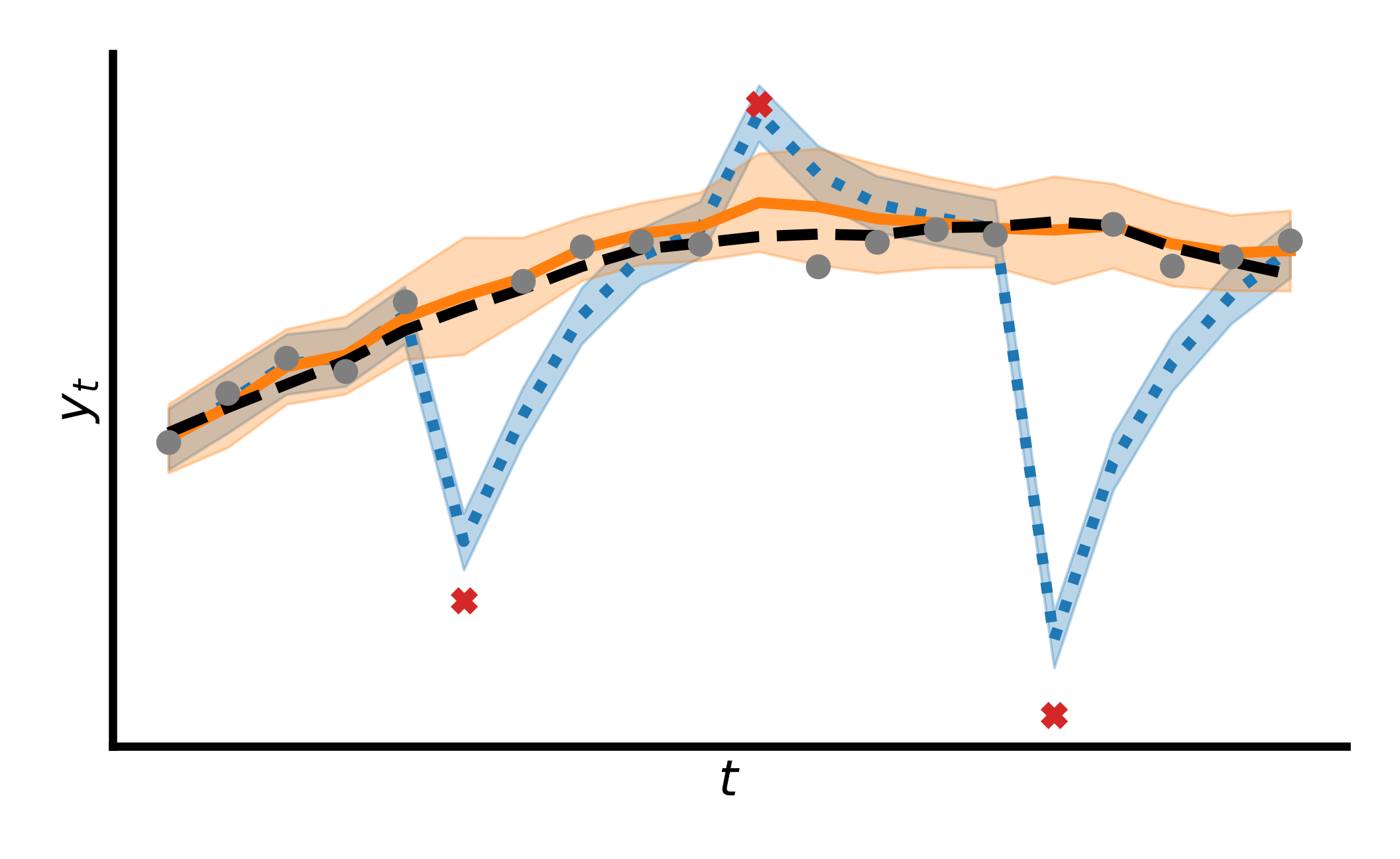
We derive a novel, provably robust, and closed-form Bayesian update rule for online filtering in state-space models in the presence of outliers and misspecified measurement models. Our method combines generalised Bayesian inference with filtering methods such as the extended and ensemble Kalman filter. We use the former to show robustness and the latter to ensure computational efficiency in the case of nonlinear models. Our method matches or outperforms other robust filtering methods (such as those based on variational Bayes) at a much lower computational cost. We show this empirically on a range of filtering problems with outlier measurements, such as object tracking, state estimation in high-dimensional chaotic systems, and online learning of neural networks.
Read more5/29/2024
➖
0
Outlier-Insensitive Kalman Filtering: Theory and Applications
Shunit Truzman, Guy Revach, Nir Shlezinger, Itzik Klein
State estimation of dynamical systems from noisy observations is a fundamental task in many applications. It is commonly addressed using the linear Kalman filter (KF), whose performance can significantly degrade in the presence of outliers in the observations, due to the sensitivity of its convex quadratic objective function. To mitigate such behavior, outlier detection algorithms can be applied. In this work, we propose a parameter-free algorithm which mitigates the harmful effect of outliers while requiring only a short iterative process of the standard update step of the KF. To that end, we model each potential outlier as a normal process with unknown variance and apply online estimation through either expectation maximization or alternating maximization algorithms. Simulations and field experiment evaluations demonstrate competitive performance of our method, showcasing its robustness to outliers in filtering scenarios compared to alternative algorithms.
Read more8/27/2024

0
Convolutional Unscented Kalman Filter for Multi-Object Tracking with Outliers
Shiqi Liu, Wenhan Cao, Chang Liu, Tianyi Zhang, Shengbo Eben Li
Multi-object tracking (MOT) is an essential technique for navigation in autonomous driving. In tracking-by-detection systems, biases, false positives, and misses, which are referred to as outliers, are inevitable due to complex traffic scenarios. Recent tracking methods are based on filtering algorithms that overlook these outliers, leading to reduced tracking accuracy or even loss of the objects trajectory. To handle this challenge, we adopt a probabilistic perspective, regarding the generation of outliers as misspecification between the actual distribution of measurement data and the nominal measurement model used for filtering. We further demonstrate that, by designing a convolutional operation, we can mitigate this misspecification. Incorporating this operation into the widely used unscented Kalman filter (UKF) in commonly adopted tracking algorithms, we derive a variant of the UKF that is robust to outliers, called the convolutional UKF (ConvUKF). We show that ConvUKF maintains the Gaussian conjugate property, thus allowing for real-time tracking. We also prove that ConvUKF has a bounded tracking error in the presence of outliers, which implies robust stability. The experimental results on the KITTI and nuScenes datasets show improved accuracy compared to representative baseline algorithms for MOT tasks.
Read more9/17/2024
0
Computation-Aware Kalman Filtering and Smoothing
Marvin Pfortner, Jonathan Wenger, Jon Cockayne, Philipp Hennig
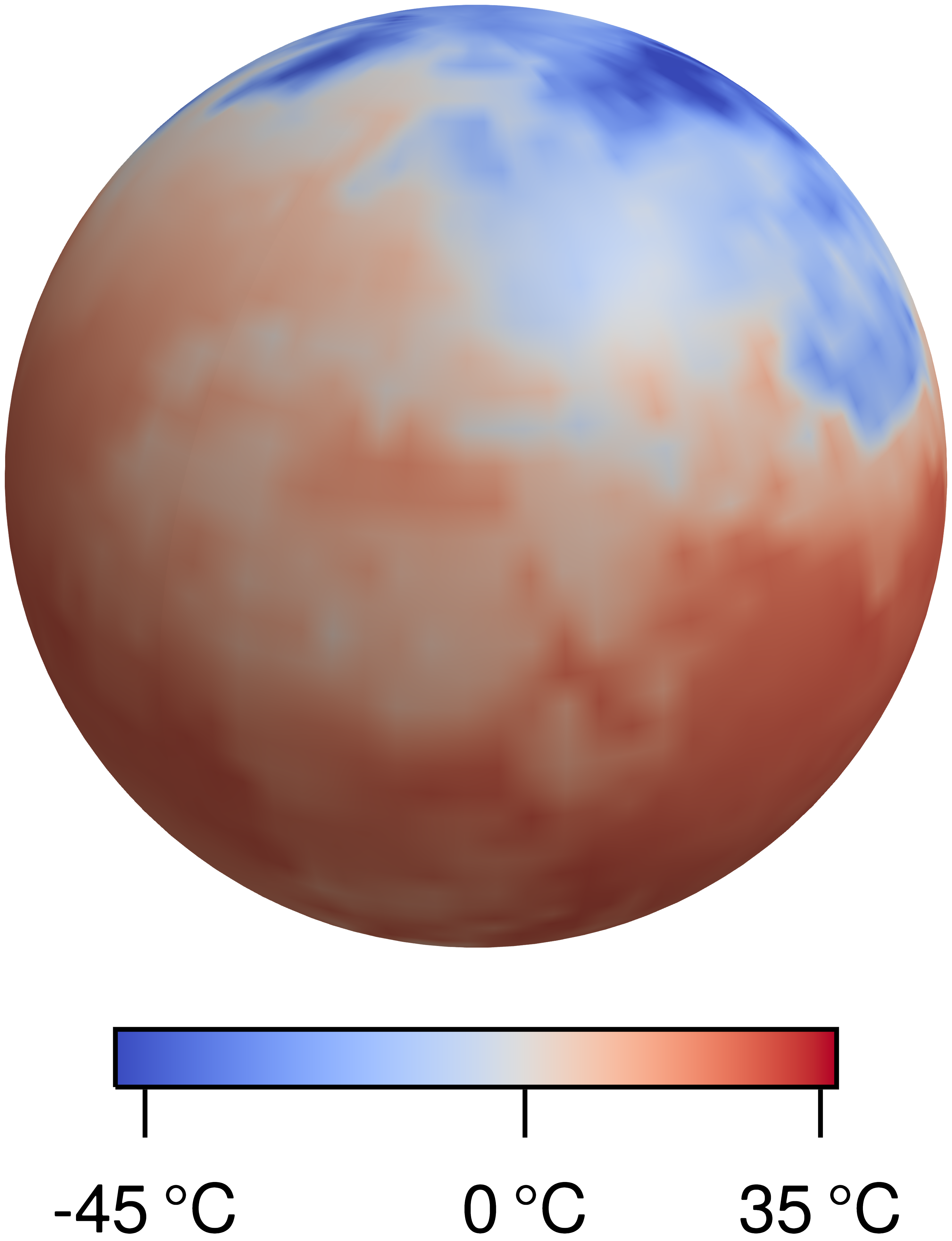
Kalman filtering and smoothing are the foundational mechanisms for efficient inference in Gauss-Markov models. However, their time and memory complexities scale prohibitively with the size of the state space. This is particularly problematic in spatiotemporal regression problems, where the state dimension scales with the number of spatial observations. Existing approximate frameworks leverage low-rank approximations of the covariance matrix. Since they do not model the error introduced by the computational approximation, their predictive uncertainty estimates can be overly optimistic. In this work, we propose a probabilistic numerical method for inference in high-dimensional Gauss-Markov models which mitigates these scaling issues. Our matrix-free iterative algorithm leverages GPU acceleration and crucially enables a tunable trade-off between computational cost and predictive uncertainty. Finally, we demonstrate the scalability of our method on a large-scale climate dataset.
Read more5/16/2024