Computation-Aware Kalman Filtering and Smoothing

0
Sign in to get full access
Overview
- This paper introduces a new approach to Kalman filtering and smoothing that takes into account the computational complexity of the problem.
- Kalman filtering and smoothing are powerful techniques for estimating the state of a dynamic system from noisy observations.
- However, when the state space dimension is large, the computational cost of these methods can become prohibitive.
- The authors propose a computation-aware Kalman filtering and smoothing approach that aims to balance estimation accuracy and computational efficiency.
Plain English Explanation
Imagine you have a system that is constantly changing over time, like the weather or the stock market. You can't directly observe the true state of the system, but you can take measurements that give you a rough idea of what's going on. The Kalman filter is a mathematical tool that can help you estimate the true state of the system based on these noisy measurements.
The Kalman filter works by keeping track of two things: the estimated state of the system and how certain you are about that estimate. As you get new measurements, the filter updates its estimate and its confidence in that estimate. Over time, the filter converges to the true state of the system.
However, when the system you're trying to track has a lot of moving parts (i.e., a large state space dimension), the Kalman filter can become computationally expensive to run. This paper introduces a new approach that tries to balance the accuracy of the Kalman filter with the computational resources required to run it.
The key idea is to integrate the variational Fourier features into the Kalman filter, which can help reduce the computational complexity without sacrificing too much accuracy. This allows the filter to be used in situations where the state space is very large, such as in dynamic process uncertainty analysis or nonlinear system identification.
Technical Explanation
The authors propose a computation-aware Kalman filtering and smoothing approach that aims to reduce the computational complexity of these methods while maintaining estimation accuracy.
The core idea is to leverage the integrated variational Fourier features to approximate the Kalman filtering and smoothing computations. This allows the authors to trade off between computational complexity and estimation accuracy.
The authors formulate the problem as a constrained optimization task, where the goal is to minimize the estimation error while keeping the computational cost within a specified budget. They derive the optimal solution using a Lagrangian approach and show that it leads to a modified Kalman filtering and smoothing algorithm.
The proposed method is evaluated on several dynamic process uncertainty analysis and nonlinear system identification tasks, demonstrating its ability to achieve significant computational savings while maintaining estimation accuracy.
Critical Analysis
The key strength of this paper is its ability to tackle the computational challenges associated with large-scale Kalman filtering and smoothing problems. By incorporating the variational Fourier features, the authors are able to achieve a favorable trade-off between accuracy and computational cost.
However, the paper does not explore the limitations of this approach in detail. For example, it is unclear how the method would perform in the presence of highly nonlinear dynamics or when the system is subject to outliers or other types of noise. Additionally, the paper does not provide a comprehensive comparison with other approaches that aim to address the computational complexity of Kalman filtering, such as inverse cubature Kalman filters or Gaussian process-based methods.
Further research could be conducted to explore the robustness and versatility of the proposed approach, as well as to investigate its performance on a wider range of real-world applications. Additionally, it would be interesting to see how the method can be extended to handle more complex system dynamics or to incorporate additional constraints, such as memory or communication constraints.
Conclusion
This paper presents a novel computation-aware Kalman filtering and smoothing approach that aims to balance estimation accuracy and computational efficiency. By leveraging the integrated variational Fourier features, the authors are able to reduce the computational complexity of these methods without sacrificing too much accuracy.
The proposed approach has the potential to enable the use of Kalman filtering and smoothing in a wider range of applications, particularly those involving dynamic process uncertainty analysis or nonlinear system identification. However, further research is needed to explore the limitations and robustness of the method, as well as to investigate potential extensions and applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Computation-Aware Kalman Filtering and Smoothing
Marvin Pfortner, Jonathan Wenger, Jon Cockayne, Philipp Hennig
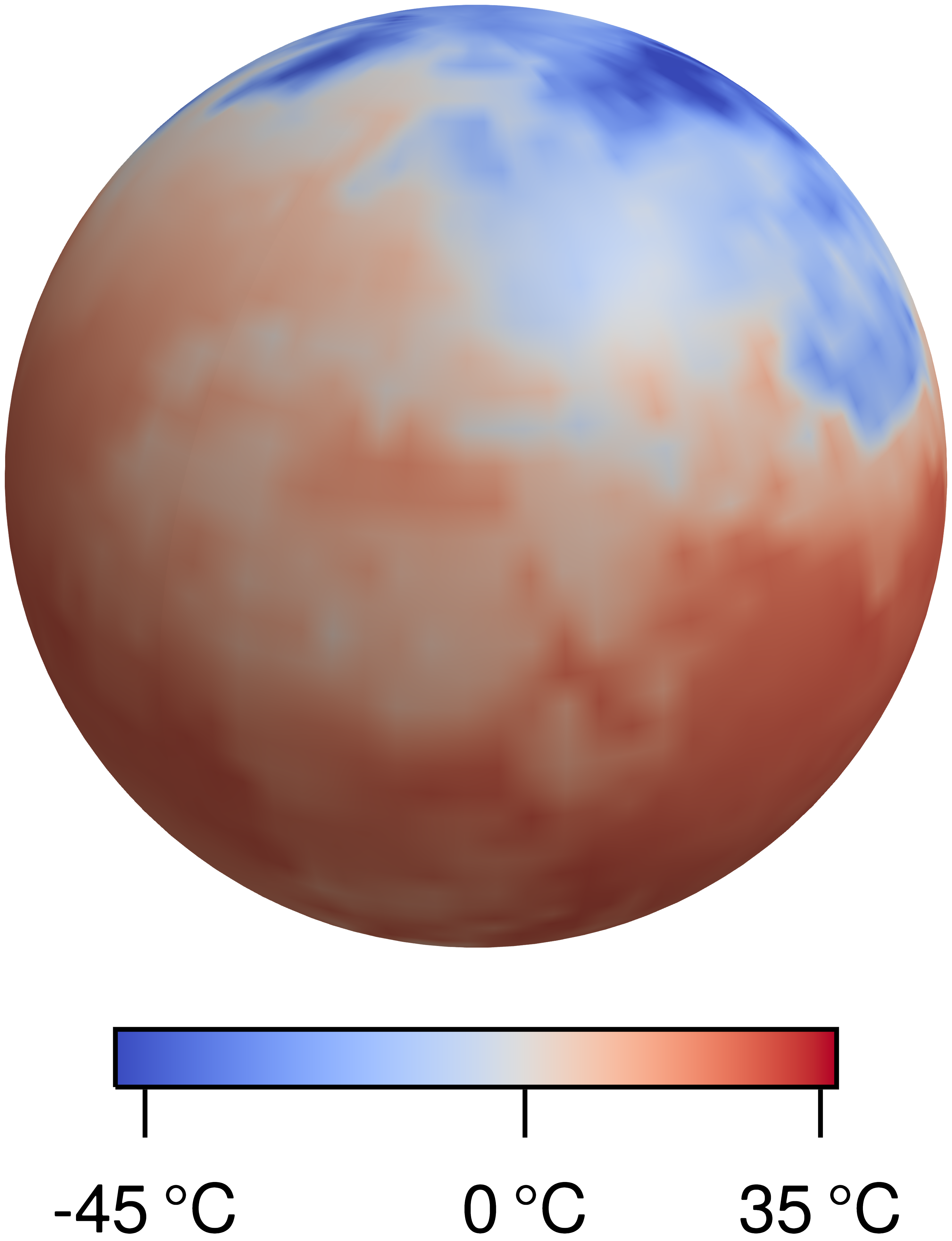
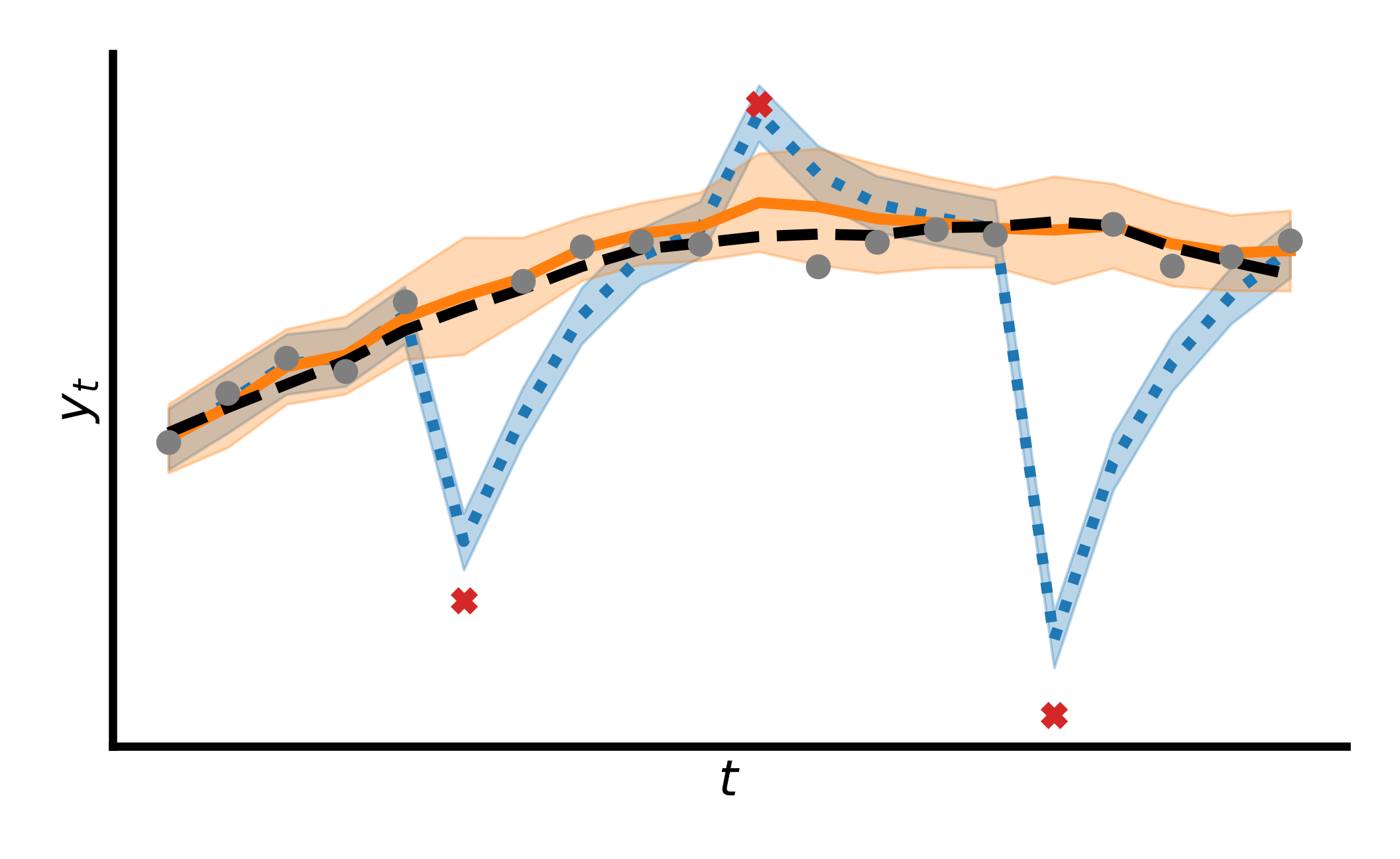
Kalman filtering and smoothing are the foundational mechanisms for efficient inference in Gauss-Markov models. However, their time and memory complexities scale prohibitively with the size of the state space. This is particularly problematic in spatiotemporal regression problems, where the state dimension scales with the number of spatial observations. Existing approximate frameworks leverage low-rank approximations of the covariance matrix. Since they do not model the error introduced by the computational approximation, their predictive uncertainty estimates can be overly optimistic. In this work, we propose a probabilistic numerical method for inference in high-dimensional Gauss-Markov models which mitigates these scaling issues. Our matrix-free iterative algorithm leverages GPU acceleration and crucially enables a tunable trade-off between computational cost and predictive uncertainty. Finally, we demonstrate the scalability of our method on a large-scale climate dataset.
Read more5/16/2024

0
Ensemble Kalman Filtering Meets Gaussian Process SSM for Non-Mean-Field and Online Inference
Zhidi Lin, Yiyong Sun, Feng Yin, Alexandre Hoang Thi'ery
The Gaussian process state-space models (GPSSMs) represent a versatile class of data-driven nonlinear dynamical system models. However, the presence of numerous latent variables in GPSSM incurs unresolved issues for existing variational inference approaches, particularly under the more realistic non-mean-field (NMF) assumption, including extensive training effort, compromised inference accuracy, and infeasibility for online applications, among others. In this paper, we tackle these challenges by incorporating the ensemble Kalman filter (EnKF), a well-established model-based filtering technique, into the NMF variational inference framework to approximate the posterior distribution of the latent states. This novel marriage between EnKF and GPSSM not only eliminates the need for extensive parameterization in learning variational distributions, but also enables an interpretable, closed-form approximation of the evidence lower bound (ELBO). Moreover, owing to the streamlined parameterization via the EnKF, the new GPSSM model can be easily accommodated in online learning applications. We demonstrate that the resulting EnKF-aided online algorithm embodies a principled objective function by ensuring data-fitting accuracy while incorporating model regularizations to mitigate overfitting. We also provide detailed analysis and fresh insights for the proposed algorithms. Comprehensive evaluation across diverse real and synthetic datasets corroborates the superior learning and inference performance of our EnKF-aided variational inference algorithms compared to existing methods.
Read more7/23/2024
0
Outlier-robust Kalman Filtering through Generalised Bayes
Gerardo Duran-Martin, Matias Altamirano, Alexander Y. Shestopaloff, Leandro S'anchez-Betancourt, Jeremias Knoblauch, Matt Jones, Franc{c}ois-Xavier Briol, Kevin Murphy
We derive a novel, provably robust, and closed-form Bayesian update rule for online filtering in state-space models in the presence of outliers and misspecified measurement models. Our method combines generalised Bayesian inference with filtering methods such as the extended and ensemble Kalman filter. We use the former to show robustness and the latter to ensure computational efficiency in the case of nonlinear models. Our method matches or outperforms other robust filtering methods (such as those based on variational Bayes) at a much lower computational cost. We show this empirically on a range of filtering problems with outlier measurements, such as object tracking, state estimation in high-dimensional chaotic systems, and online learning of neural networks.
Read more5/29/2024
📊
0
Iterative Methods for Full-Scale Gaussian Process Approximations for Large Spatial Data
Tim Gyger, Reinhard Furrer, Fabio Sigrist
Gaussian processes are flexible probabilistic regression models which are widely used in statistics and machine learning. However, a drawback is their limited scalability to large data sets. To alleviate this, we consider full-scale approximations (FSAs) that combine predictive process methods and covariance tapering, thus approximating both global and local structures. We show how iterative methods can be used to reduce the computational costs for calculating likelihoods, gradients, and predictive distributions with FSAs. We introduce a novel preconditioner and show that it accelerates the conjugate gradient method's convergence speed and mitigates its sensitivity with respect to the FSA parameters and the eigenvalue structure of the original covariance matrix, and we demonstrate empirically that it outperforms a state-of-the-art pivoted Cholesky preconditioner. Further, we present a novel, accurate, and fast way to calculate predictive variances relying on stochastic estimations and iterative methods. In both simulated and real-world data experiments, we find that our proposed methodology achieves the same accuracy as Cholesky-based computations with a substantial reduction in computational time. Finally, we also compare different approaches for determining inducing points in predictive process and FSA models. All methods are implemented in a free C++ software library with high-level Python and R packages.
Read more5/24/2024