Output-feedback Synthesis Orbit Geometry: Quotient Manifolds and LQG Direct Policy Optimization
2403.17157
0
0

Abstract
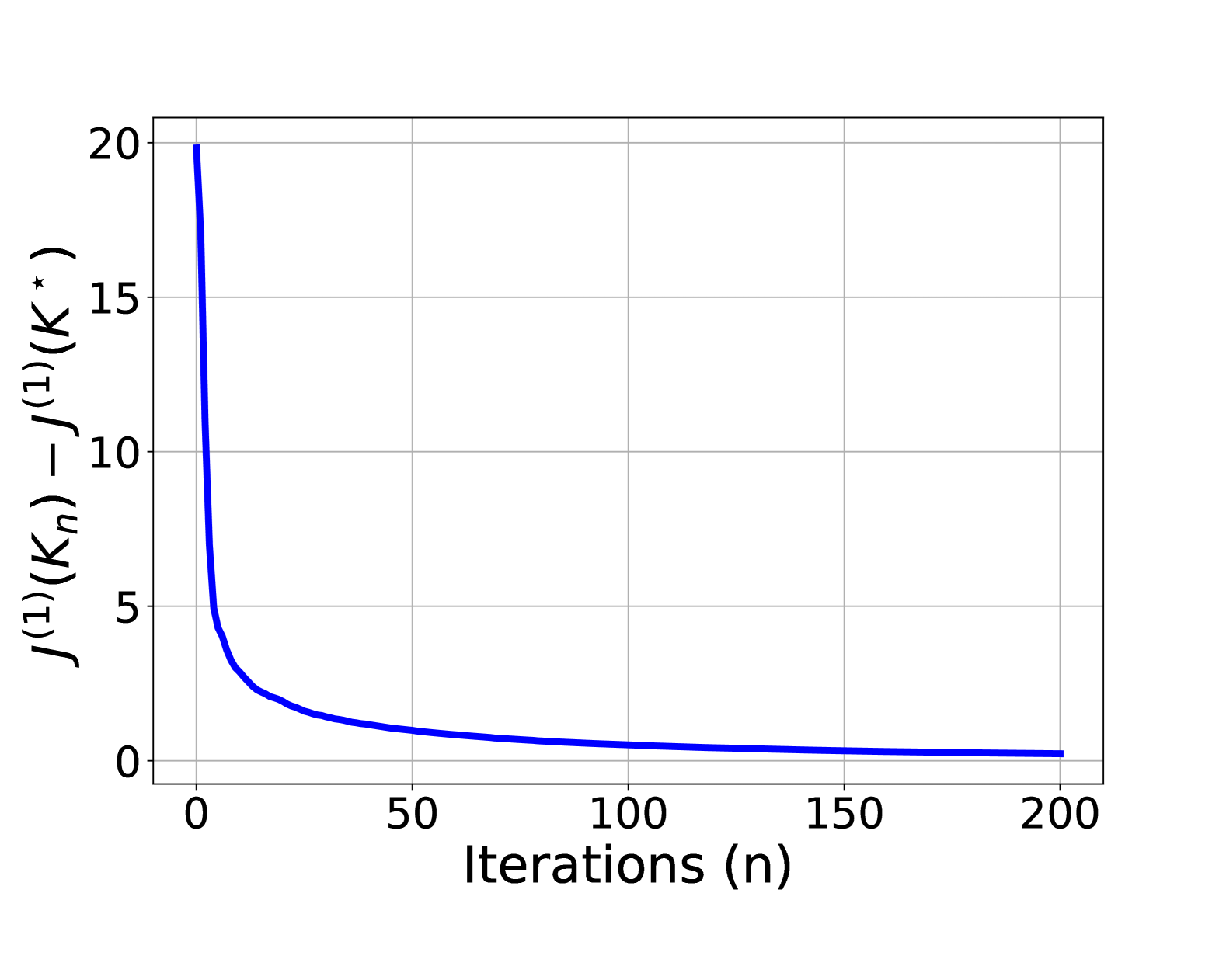
In this paper, we consider direct policy optimization for the linear-quadratic Gaussian (LQG) setting. Over the past few years, it has been recognized that the landscape of stabilizing output-feedback controllers of relevance to LQG has an intricate geometry, particularly as it pertains to the existence of spurious stationary points. In order to address such challenges, in this paper, we first adopt a Riemannian metric for the space of stabilizing full-order minimal output-feedback controllers. We then proceed to prove that the orbit space of such controllers modulo coordinate transformation admits a Riemannian quotient manifold structure. This geometric structure is then used to develop a Riemannian gradient descent for the direct LQG policy optimization. We prove a local convergence guarantee with linear rate and show the proposed approach exhibits significantly faster and more robust numerical performance as compared with ordinary gradient descent for LQG. Subsequently, we provide reasons for this observed behavior; in particular, we argue that optimizing over the orbit space of controllers is the right theoretical and computational setup for direct LQG policy optimization.
Create account to get full access
Overview
- This paper explores the geometry of output-feedback synthesis for control systems, focusing on the role of quotient manifolds and the use of direct policy optimization in Linear-Quadratic-Gaussian (LQG) control.
- The researchers investigate the underlying structure of the output-feedback synthesis problem, leveraging the concept of quotient manifolds to gain insights into the problem's geometry.
- Additionally, the paper introduces a direct policy optimization approach for LQG control, which aims to optimize the control policy directly without the need for separate estimation and control steps.
Plain English Explanation
This research paper delves into the intricate world of control systems, specifically exploring the geometry of output-feedback synthesis. Output-feedback synthesis is a crucial aspect of control theory, where the control system relies on the system's outputs (e.g., sensor measurements) rather than its internal states to determine the appropriate control actions.
The researchers in this paper take a deep dive into the underlying structure of the output-feedback synthesis problem, using the concept of quotient manifolds to gain a better understanding of its geometry. Quotient manifolds are a mathematical tool that allows the researchers to simplify the problem by considering equivalence classes of system states, rather than the individual states themselves.
In addition to the geometric analysis, the paper introduces a novel approach called direct policy optimization for Linear-Quadratic-Gaussian (LQG) control. LQG is a widely used control technique that combines linear system dynamics, quadratic performance criteria, and Gaussian noise assumptions. The direct policy optimization method aims to optimize the control policy directly, without the need for separate estimation and control steps, as is typically done in traditional LQG control.
Technical Explanation
The paper begins by establishing the necessary preliminaries for understanding the output-feedback synthesis problem, including concepts from differential geometry and control theory.
The core of the paper focuses on the geometric structure of the output-feedback synthesis problem. By considering the quotient of the state space by the output space, the researchers are able to analyze the geometry of the problem and gain insights into the structure of the optimal control laws. This quotient manifold approach allows for a more comprehensive understanding of the problem's underlying characteristics.
Building on this geometric analysis, the paper then introduces a direct policy optimization approach for LQG control. Instead of the traditional two-step process of estimating the system state and then determining the control action, the direct policy optimization method aims to optimize the control policy directly, without the intermediate estimation step. This approach can potentially lead to improved control performance and computational efficiency.
Critical Analysis
The paper presents a novel and insightful perspective on the output-feedback synthesis problem, highlighting the importance of the underlying geometric structure. The quotient manifold analysis provides a powerful tool for understanding the problem's characteristics and potentially leads to more effective control strategies.
However, the paper does not address the potential challenges or limitations of the proposed direct policy optimization approach for LQG control. While the method promises improved performance, it may also introduce computational complexities or require specific assumptions that limit its applicability in real-world scenarios. Additional research may be necessary to fully understand the practical implications and potential tradeoffs of this approach.
Furthermore, the paper does not delve into the potential applications or broader implications of the research findings. Exploring how the insights from this work could be leveraged in the design and optimization of real-world control systems would be a valuable extension of the study.
Conclusion
This research paper presents a compelling exploration of the geometric structure underlying the output-feedback synthesis problem, leveraging the concept of quotient manifolds. The introduction of a direct policy optimization approach for LQG control also offers a promising alternative to traditional control techniques.
The findings of this paper have the potential to contribute to the ongoing advancement of control theory and the development of more efficient and effective control systems. By incorporating the insights from the geometric analysis and the direct policy optimization method, control engineers may be able to design more robust and adaptable control solutions for a wide range of applications, from industrial automation to autonomous vehicles and beyond.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Accelerated Optimization Landscape of Linear-Quadratic Regulator
Lechen Feng, Yuan-Hua Ni
0
0
Linear-quadratic regulator (LQR) is a landmark problem in the field of optimal control, which is the concern of this paper. Generally, LQR is classified into state-feedback LQR (SLQR) and output-feedback LQR (OLQR) based on whether the full state is obtained. It has been suggested in existing literature that both SLQR and OLQR could be viewed as textit{constrained nonconvex matrix optimization} problems in which the only variable to be optimized is the feedback gain matrix. In this paper, we introduce a first-order accelerated optimization framework of handling the LQR problem, and give its convergence analysis for the cases of SLQR and OLQR, respectively. Specifically, a Lipschiz Hessian property of LQR performance criterion is presented, which turns out to be a crucial property for the application of modern optimization techniques. For the SLQR problem, a continuous-time hybrid dynamic system is introduced, whose solution trajectory is shown to converge exponentially to the optimal feedback gain with Nesterov-optimal order $1-frac{1}{sqrt{kappa}}$ ($kappa$ the condition number). Then, the symplectic Euler scheme is utilized to discretize the hybrid dynamic system, and a Nesterov-type method with a restarting rule is proposed that preserves the continuous-time convergence rate, i.e., the discretized algorithm admits the Nesterov-optimal convergence order. For the OLQR problem, a Hessian-free accelerated framework is proposed, which is a two-procedure method consisting of semiconvex function optimization and negative curvature exploitation. In a time $mathcal{O}(epsilon^{-7/4}log(1/epsilon))$, the method can find an $epsilon$-stationary point of the performance criterion; this entails that the method improves upon the $mathcal{O}(epsilon^{-2})$ complexity of vanilla gradient descent. Moreover, our method provides the second-order guarantee of stationary point.
4/16/2024

Model-Agnostic Zeroth-Order Policy Optimization for Meta-Learning of Ergodic Linear Quadratic Regulators
Yunian Pan, Quanyan Zhu
0
0
Meta-learning has been proposed as a promising machine learning topic in recent years, with important applications to image classification, robotics, computer games, and control systems. In this paper, we study the problem of using meta-learning to deal with uncertainty and heterogeneity in ergodic linear quadratic regulators. We integrate the zeroth-order optimization technique with a typical meta-learning method, proposing an algorithm that omits the estimation of policy Hessian, which applies to tasks of learning a set of heterogeneous but similar linear dynamic systems. The induced meta-objective function inherits important properties of the original cost function when the set of linear dynamic systems are meta-learnable, allowing the algorithm to optimize over a learnable landscape without projection onto the feasible set. We provide a convergence result for the exact gradient descent process by analyzing the boundedness and smoothness of the gradient for the meta-objective, which justify the proposed algorithm with gradient estimation error being small. We also provide a numerical example to corroborate this perspective.
5/28/2024
Meta-Learning Linear Quadratic Regulators: A Policy Gradient MAML Approach for Model-free LQR
Leonardo F. Toso, Donglin Zhan, James Anderson, Han Wang
0
0
We investigate the problem of learning linear quadratic regulators (LQR) in a multi-task, heterogeneous, and model-free setting. We characterize the stability and personalization guarantees of a policy gradient-based (PG) model-agnostic meta-learning (MAML) (Finn et al., 2017) approach for the LQR problem under different task-heterogeneity settings. We show that our MAML-LQR algorithm produces a stabilizing controller close to each task-specific optimal controller up to a task-heterogeneity bias in both model-based and model-free learning scenarios. Moreover, in the model-based setting, we show that such a controller is achieved with a linear convergence rate, which improves upon sub-linear rates from existing work. Our theoretical guarantees demonstrate that the learned controller can efficiently adapt to unseen LQR tasks.
6/4/2024

Distributionally Robust Policy and Lyapunov-Certificate Learning
Kehan Long, Jorge Cortes, Nikolay Atanasov
0
0
This article presents novel methods for synthesizing distributionally robust stabilizing neural controllers and certificates for control systems under model uncertainty. A key challenge in designing controllers with stability guarantees for uncertain systems is the accurate determination of and adaptation to shifts in model parametric uncertainty during online deployment. We tackle this with a novel distributionally robust formulation of the Lyapunov derivative chance constraint ensuring a monotonic decrease of the Lyapunov certificate. To avoid the computational complexity involved in dealing with the space of probability measures, we identify a sufficient condition in the form of deterministic convex constraints that ensures the Lyapunov derivative constraint is satisfied. We integrate this condition into a loss function for training a neural network-based controller and show that, for the resulting closed-loop system, the global asymptotic stability of its equilibrium can be certified with high confidence, even with Out-of-Distribution (OoD) model uncertainties. To demonstrate the efficacy and efficiency of the proposed methodology, we compare it with an uncertainty-agnostic baseline approach and several reinforcement learning approaches in two control problems in simulation.
4/8/2024