PAAMP: Polytopic Action-Set And Motion Planning for Long Horizon Dynamic Motion Planning via Mixed Integer Linear Programming

0

Sign in to get full access
Overview
- This paper presents a new method for long-horizon dynamic motion planning called PAAMP (Polytopic Action-Set And Motion Planning).
- PAAMP uses mixed integer linear programming (MILP) to generate optimal trajectories for complex robotic systems with constraints.
- The key innovation is the use of polytopic action sets to model the feasible actions at each time step, enabling efficient planning over long time horizons.
Plain English Explanation
The researchers have developed a new approach for planning the movements of complex robots over long time periods. The challenge is that robots have many constraints on how they can move, such as joint limits, obstacles in the environment, and dynamic limitations. Traditional planning methods struggle to find optimal plans that satisfy all these constraints, especially for long time horizons.
The key idea in this paper is to represent the set of feasible actions the robot can take at each time step as a geometric shape called a polytope. This polytopic action set captures all the constraints on the robot's motion in a compact way. The researchers then use a powerful optimization technique called mixed integer linear programming (MILP) to find the sequence of actions that minimizes a cost function, such as energy usage or task completion time, while respecting all the constraints.
By using this polytopic representation and MILP solver, the researchers show that their PAAMP method can plan long, complex robot motions very efficiently. This opens up new possibilities for robots to perform challenging tasks that require coordinated, dynamic movements over extended time periods.
Technical Explanation
Short Horizon Planning using Polytopic Action Sets
The core idea of PAAMP is to model the set of feasible actions the robot can take at each time step as a convex polytope in the robot's state-action space. This polytopic action set captures all the constraints on the robot's motion, such as joint limits, obstacle avoidance, and dynamic limitations.
At each time step, the robot selects an action from within this polytopic set. The researchers then use a mixed integer linear program (MILP) to efficiently find the sequence of actions that minimizes a cost function, such as energy usage or task completion time, while respecting all the motion constraints.
The key benefit of this approach is that the MILP can reason about long-horizon plans very efficiently. Traditional planning methods struggle as the planning horizon increases, but the compact polytopic representation and MILP solver allow PAAMP to scale well to complex, long-duration tasks.
Critical Analysis
The authors acknowledge several limitations of their PAAMP approach. First, the polytopic action sets must be precomputed offline, which can be computationally expensive for high-dimensional robotic systems. Second, the MILP solver may struggle with very large or complex problems, limiting the scalability of the approach.
Additionally, the paper does not extensively evaluate PAAMP's performance on real-world robotic systems or compare it to other state-of-the-art planning methods. More thorough empirical validation would be helpful to fully assess the strengths and weaknesses of the approach.
It would also be interesting to see how PAAMP could be combined with other motion planning techniques, such as learning-based methods, to further improve its capabilities and robustness.
Conclusion
Overall, the PAAMP method presented in this paper represents an promising new approach for long-horizon dynamic motion planning of complex robotic systems. By leveraging polytopic action sets and mixed integer linear programming, the researchers have developed an efficient planning framework that can handle a wide range of motion constraints.
While there are still some limitations to address, PAAMP opens up exciting new possibilities for robots to perform challenging, dexterous tasks that require coordinated, dynamic movements over extended time periods. As robotic systems continue to grow in complexity, methods like PAAMP will be crucial for unlocking their full potential.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
PAAMP: Polytopic Action-Set And Motion Planning for Long Horizon Dynamic Motion Planning via Mixed Integer Linear Programming
Akshay Jaitly, Siavash Farzan
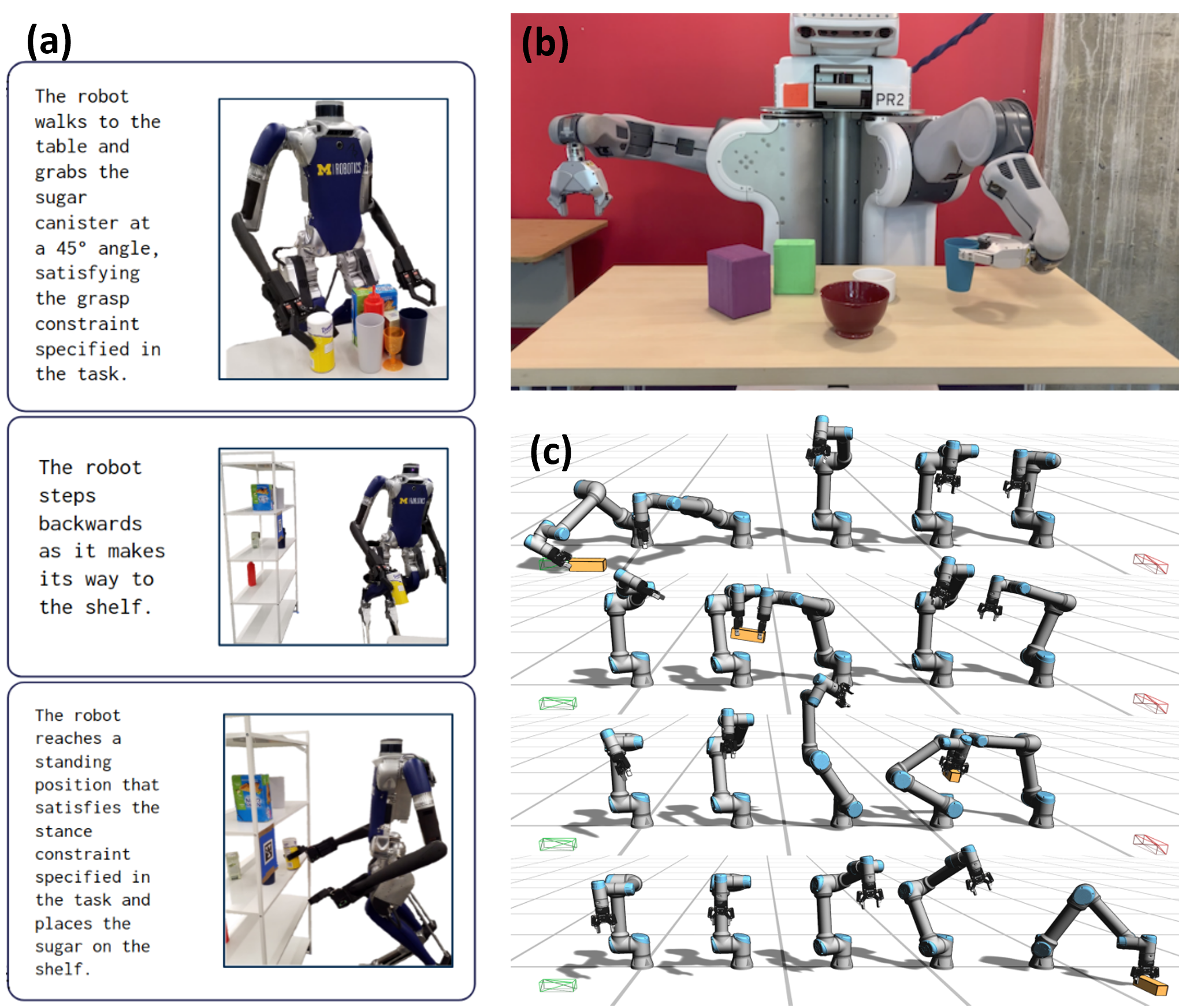
Optimization methods for long-horizon, dynamically feasible motion planning in robotics tackle challenging non-convex and discontinuous optimization problems. Traditional methods often falter due to the nonlinear characteristics of these problems. We introduce a technique that utilizes learned representations of the system, known as Polytopic Action Sets, to efficiently compute long-horizon trajectories. By employing a suitable sequence of Polytopic Action Sets, we transform the long-horizon dynamically feasible motion planning problem into a Linear Program. This reformulation enables us to address motion planning as a Mixed Integer Linear Program (MILP). We demonstrate the effectiveness of a Polytopic Action-Set and Motion Planning (PAAMP) approach by identifying swing-up motions for a torque-constrained pendulum as fast as 0.75 milliseconds. This approach is well-suited for solving complex motion planning and long-horizon Constraint Satisfaction Problems (CSPs) in dynamic and underactuated systems such as legged and aerial robots.
Read more8/29/2024
0
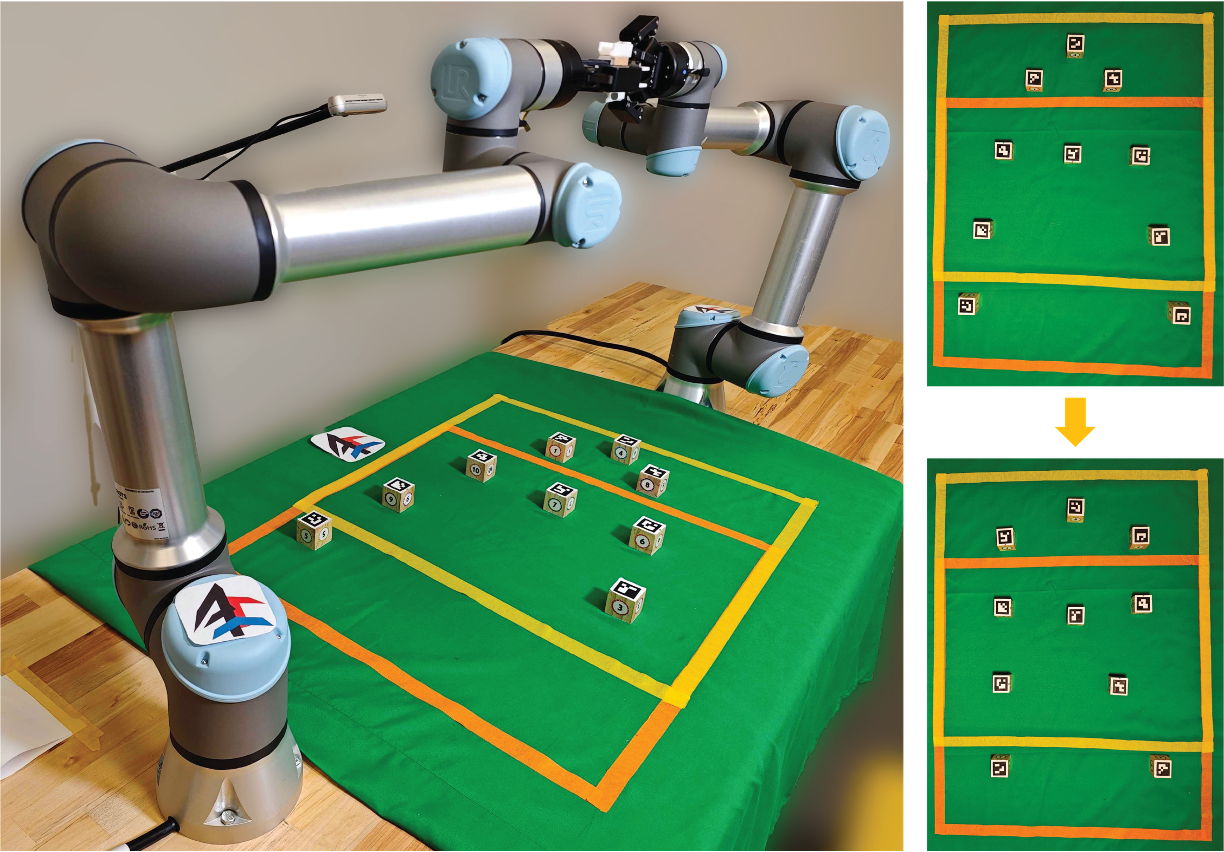
Toward Holistic Planning and Control Optimization for Dual-Arm Rearrangement
Kai Gao, Zihe Ye, Duo Zhang, Baichuan Huang, Jingjin Yu
Long-horizon task and motion planning (TAMP) is notoriously difficult to solve, let alone optimally, due to the tight coupling between the interleaved (discrete) task and (continuous) motion planning phases, where each phase on its own is frequently an NP-hard or even PSPACE-hard computational challenge. In this study, we tackle the even more challenging goal of jointly optimizing task and motion plans for a real dual-arm system in which the two arms operate in close vicinity to solve highly constrained tabletop multi-object rearrangement problems. Toward that, we construct a tightly integrated planning and control optimization pipeline, Makespan-Optimized Dual-Arm Planner (MODAP) that combines novel sampling techniques for task planning with state-of-the-art trajectory optimization techniques. Compared to previous state-of-the-art, MODAP produces task and motion plans that better coordinate a dual-arm system, delivering significantly improved execution time improvements while simultaneously ensuring that the resulting time-parameterized trajectory conforms to specified acceleration and jerk limits.
Read more4/11/2024
0
A Survey of Optimization-based Task and Motion Planning: From Classical To Learning Approaches
Zhigen Zhao, Shuo Cheng, Yan Ding, Ziyi Zhou, Shiqi Zhang, Danfei Xu, Ye Zhao
Task and Motion Planning (TAMP) integrates high-level task planning and low-level motion planning to equip robots with the autonomy to effectively reason over long-horizon, dynamic tasks. Optimization-based TAMP focuses on hybrid optimization approaches that define goal conditions via objective functions and are capable of handling open-ended goals, robotic dynamics, and physical interaction between the robot and the environment. Therefore, optimization-based TAMP is particularly suited to solve highly complex, contact-rich locomotion and manipulation problems. This survey provides a comprehensive review on optimization-based TAMP, covering (i) planning domain representations, including action description languages and temporal logic, (ii) individual solution strategies for components of TAMP, including AI planning and trajectory optimization (TO), and (iii) the dynamic interplay between logic-based task planning and model-based TO. A particular focus of this survey is to highlight the algorithm structures to efficiently solve TAMP, especially hierarchical and distributed approaches. Additionally, the survey emphasizes the synergy between the classical methods and contemporary learning-based innovations such as large language models. Furthermore, the future research directions for TAMP is discussed in this survey, highlighting both algorithmic and application-specific challenges.
Read more7/2/2024

0
New!Rigid Body Path Planning using Mixed-Integer Linear Programming
Mingxin Yu, Chuchu Fan
Navigating rigid body objects through crowded environments can be challenging, especially when narrow passages are presented. Existing sampling-based planners and optimization-based methods like mixed integer linear programming (MILP) formulations, suffer from limited scalability with respect to either the size of the workspace or the number of obstacles. In order to address the scalability issue, we propose a three-stage algorithm that first generates a graph of convex polytopes in the workspace free of collision, then poses a large set of small MILPs to generate viable paths between polytopes, and finally queries a pair of start and end configurations for a feasible path online. The graph of convex polytopes serves as a decomposition of the free workspace and the number of decision variables in each MILP is limited by restricting the subproblem within two or three free polytopes rather than the entire free region. Our simulation results demonstrate shorter online computation time compared to baseline methods and scales better with the size of the environment and tunnel width than sampling-based planners in both 2D and 3D environments.
Read more9/19/2024