Parallel Distributional Deep Reinforcement Learning for Mapless Navigation of Terrestrial Mobile Robots

0

Sign in to get full access
Overview
- This paper presents a parallel distributional deep reinforcement learning (PDDRL) approach for mapless navigation of terrestrial mobile robots.
- The method combines distributional reinforcement learning with parallel execution of multiple agents to improve navigation performance without requiring a map.
- Key contributions include a novel PDDRL training framework and evaluation on challenging simulated and real-world environments.
Plain English Explanation
The researchers developed a new way for mobile robots to navigate through environments without using a pre-made map. Their approach, called parallel distributional deep reinforcement learning (PDDRL), has a few key elements:
-
Distributional Reinforcement Learning: Instead of just predicting a single reward value, the system models the full distribution of possible rewards. This provides more information to guide the robot's actions.
-
Parallel Execution: Multiple robot agents are trained simultaneously, allowing them to explore the environment more efficiently in parallel.
-
No Map Required: The robots can navigate successfully without having access to a pre-made map of the environment. This makes the system more flexible and applicable to a wider range of real-world scenarios.
By combining these techniques, the researchers were able to create a navigation system that performs well in challenging simulated and real-world environments, without requiring a detailed map ahead of time. This could be very useful for robots operating in unknown or dynamic spaces.
Technical Explanation
The paper presents a PDDRL approach for mapless navigation of terrestrial mobile robots. The key components are:
-
Distributional Reinforcement Learning: Instead of predicting a single expected reward value, the system models the full probability distribution of possible rewards. This provides more information to guide the robot's actions.
-
Parallel Execution: Multiple robot agents are trained simultaneously in parallel, allowing them to explore the environment more efficiently.
-
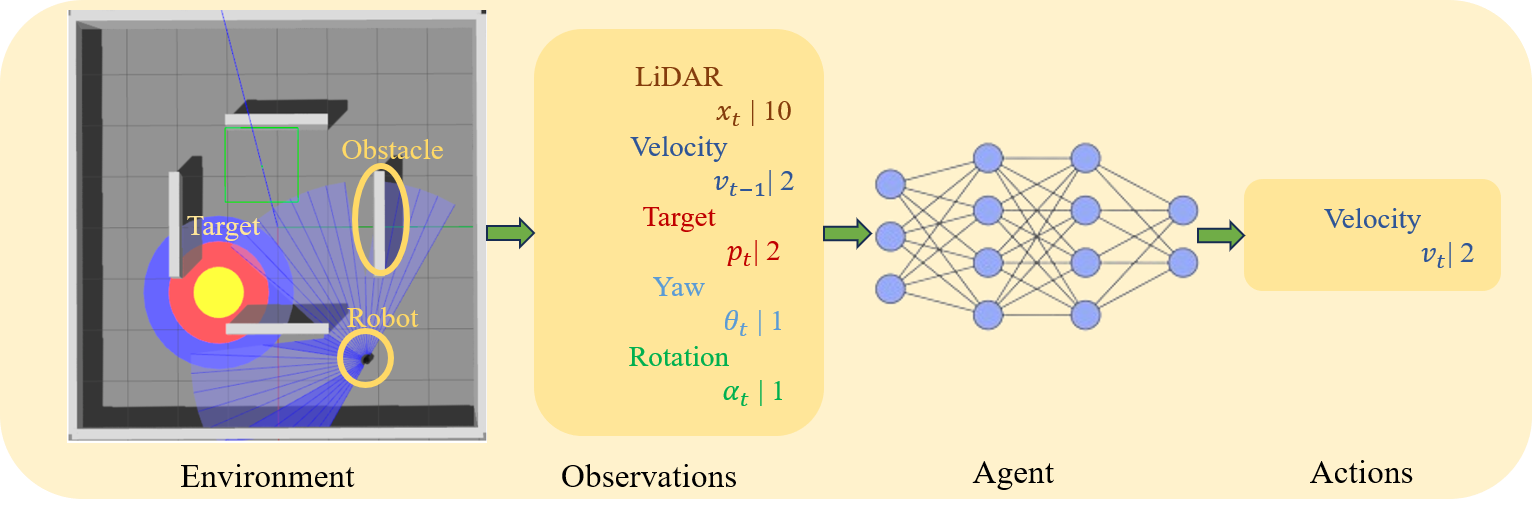
Neural Network Architecture: The system uses a deep neural network with convolutional and recurrent layers to process sensor inputs and generate navigation actions.
-
Training Process: The agents are trained using a PDDRL objective that maximizes the expected value of the reward distribution. This is implemented using a novel parallel training framework.
The approach is evaluated in both simulated and real-world environments, demonstrating improved navigation performance compared to baseline methods that do not leverage distributional or parallel learning.
Critical Analysis
The paper makes a compelling case for the benefits of PDDRL for mapless navigation, but several caveats and limitations are worth noting:
- The evaluation is primarily conducted in simulated environments, so further real-world testing is needed to fully validate the approach.
- The training process can be computationally intensive due to the parallel execution of multiple agents.
- The system may struggle in highly dynamic or unpredictable environments where the reward distribution changes rapidly.
- The impact of various hyperparameters and architectural choices on performance is not explored in depth.
Additionally, while the authors mention potential applications in areas like search and rescue, the paper does not delve into the broader societal implications of this research. Further discussion of ethical considerations and potential misuse scenarios could strengthen the analysis.
Conclusion
This paper presents a novel PDDRL approach for mapless navigation of mobile robots that combines distributional reinforcement learning and parallel execution to achieve strong performance without requiring a pre-made map. The technical innovations and promising results suggest this method could be a valuable tool for enabling robots to operate effectively in unknown or dynamic environments. However, the research would benefit from more real-world validation and a deeper exploration of its limitations and broader implications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Parallel Distributional Deep Reinforcement Learning for Mapless Navigation of Terrestrial Mobile Robots
Victor Augusto Kich, Alisson Henrique Kolling, Junior Costa de Jesus, Gabriel V. Heisler, Hiago Jacobs, Jair Augusto Bottega, Andr'e L. da S. Kelbouscas, Akihisa Ohya, Ricardo Bedin Grando, Paulo Lilles Jorge Drews-Jr, Daniel Fernando Tello Gamarra
This paper introduces novel deep reinforcement learning (Deep-RL) techniques using parallel distributional actor-critic networks for navigating terrestrial mobile robots. Our approaches use laser range findings, relative distance, and angle to the target to guide the robot. We trained agents in the Gazebo simulator and deployed them in real scenarios. Results show that parallel distributional Deep-RL algorithms enhance decision-making and outperform non-distributional and behavior-based approaches in navigation and spatial generalization.
Read more9/4/2024
0
Deep Reinforcement Learning with Enhanced PPO for Safe Mobile Robot Navigation
Hamid Taheri, Seyed Rasoul Hosseini, Mohammad Ali Nekoui
Collision-free motion is essential for mobile robots. Most approaches to collision-free and efficient navigation with wheeled robots require parameter tuning by experts to obtain good navigation behavior. This study investigates the application of deep reinforcement learning to train a mobile robot for autonomous navigation in a complex environment. The robot utilizes LiDAR sensor data and a deep neural network to generate control signals guiding it toward a specified target while avoiding obstacles. We employ two reinforcement learning algorithms in the Gazebo simulation environment: Deep Deterministic Policy Gradient and proximal policy optimization. The study introduces an enhanced neural network structure in the Proximal Policy Optimization algorithm to boost performance, accompanied by a well-designed reward function to improve algorithm efficacy. Experimental results conducted in both obstacle and obstacle-free environments underscore the effectiveness of the proposed approach. This research significantly contributes to the advancement of autonomous robotics in complex environments through the application of deep reinforcement learning.
Read more8/9/2024

0
Multi-Agent Deep Reinforcement Learning for Distributed Satellite Routing
Federico Lozano-Cuadra, Beatriz Soret
This paper introduces a Multi-Agent Deep Reinforcement Learning (MA-DRL) approach for routing in Low Earth Orbit Satellite Constellations (LSatCs). Each satellite is an independent decision-making agent with a partial knowledge of the environment, and supported by feedback received from the nearby agents. Building on our previous work that introduced a Q-routing solution, the contribution of this paper is to extend it to a deep learning framework able to quickly adapt to the network and traffic changes, and based on two phases: (1) An offline exploration learning phase that relies on a global Deep Neural Network (DNN) to learn the optimal paths at each possible position and congestion level; (2) An online exploitation phase with local, on-board, pre-trained DNNs. Results show that MA-DRL efficiently learns optimal routes offline that are then loaded for an efficient distributed routing online.
Read more7/9/2024
🤿
0
Autonomous Navigation of Unmanned Vehicle Through Deep Reinforcement Learning
Letian Xu, Jiabei Liu, Haopeng Zhao, Tianyao Zheng, Tongzhou Jiang, Lipeng Liu
This paper explores the method of achieving autonomous navigation of unmanned vehicles through Deep Reinforcement Learning (DRL). The focus is on using the Deep Deterministic Policy Gradient (DDPG) algorithm to address issues in high-dimensional continuous action spaces. The paper details the model of a Ackermann robot and the structure and application of the DDPG algorithm. Experiments were conducted in a simulation environment to verify the feasibility of the improved algorithm. The results demonstrate that the DDPG algorithm outperforms traditional Deep Q-Network (DQN) and Double Deep Q-Network (DDQN) algorithms in path planning tasks.
Read more7/30/2024