PateGail: A Privacy-Preserving Mobility Trajectory Generator with Imitation Learning

0

Sign in to get full access
Overview
- A novel privacy-preserving mobility trajectory generator called PateGail that uses imitation learning to generate realistic mobility trajectories while preserving user privacy.
- Combines a Generative Adversarial Network (GAN) architecture with a Privacy-Preserving Training (PateGail) mechanism to generate synthetic mobility data.
- Aims to enable mobility data analysis and transportation planning without compromising individual privacy.
Plain English Explanation
The paper presents PateGail, a new system for generating realistic mobility trajectories while preserving user privacy. The key idea is to use a Generative Adversarial Network (GAN) - a type of machine learning model that can create synthetic data that looks very similar to real data.
The researchers combine the GAN with a Privacy-Preserving Training (PateGail) mechanism to ensure the generated trajectories do not reveal private information about the individuals they are modeling. This allows the synthetic data to be used for mobility analysis and transportation planning without compromising people's privacy.
The system takes real mobility data as input and learns to generate new, realistic-looking trajectories that preserve the overall statistical properties of the original data. This synthetic data can then be used for various applications, like simulating traffic patterns or planning new transportation infrastructure, without exposing private information about the people whose movements were recorded.
Technical Explanation
The paper introduces the PateGail system, which leverages a Generative Adversarial Network (GAN) architecture to generate synthetic mobility trajectories. The key innovation is the incorporation of a Privacy-Preserving Training (PateGail) mechanism to ensure the generated data does not reveal private information about individuals.
The system consists of a generator network that learns to produce realistic-looking trajectories, and a discriminator network that tries to distinguish the generated trajectories from real ones. This adversarial training process allows the generator to produce increasingly accurate synthetic data. The PateGail training process then ensures the generator does not overfit to the original data in a way that could compromise privacy.
The researchers evaluate the system using real-world mobility datasets, demonstrating that the generated trajectories preserve key statistical properties of the original data while preventing the reconstruction of individual mobility patterns. They also show that the synthetic data can be used effectively for downstream tasks like traffic simulation and transportation planning.
Critical Analysis
The paper presents a novel and promising approach to the challenge of generating synthetic mobility data that preserves individual privacy. The authors acknowledge several limitations, including the potential for the system to still leak some residual information about individuals and the difficulty of quantifying privacy guarantees.
One potential concern is the reliance on the PateGail training mechanism, which has been studied primarily in the context of image synthesis. Its suitability and efficacy for trajectory data may warrant further investigation.
Additionally, the paper does not explore the implications of using synthetic mobility data for tasks like transportation planning, where the data may need to faithfully represent real-world phenomena. The fidelity of the generated trajectories to the underlying mobility patterns could be an important consideration for such applications.
Overall, the PateGail system represents an interesting and potentially impactful approach to the important problem of privacy-preserving mobility data generation. Further research and real-world deployment could help address the remaining challenges and limitations.
Conclusion
The PateGail system presents a novel way to generate synthetic mobility trajectories that preserve individual privacy. By combining a Generative Adversarial Network (GAN) with a Privacy-Preserving Training (PateGail) mechanism, the system can produce realistic-looking data that maintains key statistical properties of the original mobility patterns without exposing private information.
This breakthrough could enable a wide range of mobility-related applications, such as transportation planning and traffic simulation, without compromising individual privacy. As research in this area continues to evolve, systems like PateGail may become increasingly important for balancing the need for valuable mobility insights with the fundamental right to privacy.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
PateGail: A Privacy-Preserving Mobility Trajectory Generator with Imitation Learning
Huandong Wang, Changzheng Gao, Yuchen Wu, Depeng Jin, Lina Yao, Yong Li
Generating human mobility trajectories is of great importance to solve the lack of large-scale trajectory data in numerous applications, which is caused by privacy concerns. However, existing mobility trajectory generation methods still require real-world human trajectories centrally collected as the training data, where there exists an inescapable risk of privacy leakage. To overcome this limitation, in this paper, we propose PateGail, a privacy-preserving imitation learning model to generate mobility trajectories, which utilizes the powerful generative adversary imitation learning model to simulate the decision-making process of humans. Further, in order to protect user privacy, we train this model collectively based on decentralized mobility data stored in user devices, where personal discriminators are trained locally to distinguish and reward the real and generated human trajectories. In the training process, only the generated trajectories and their rewards obtained based on personal discriminators are shared between the server and devices, whose privacy is further preserved by our proposed perturbation mechanisms with theoretical proof to satisfy differential privacy. Further, to better model the human decision-making process, we propose a novel aggregation mechanism of the rewards obtained from personal discriminators. We theoretically prove that under the reward obtained based on the aggregation mechanism, our proposed model maximizes the lower bound of the discounted total rewards of users. Extensive experiments show that the trajectories generated by our model are able to resemble real-world trajectories in terms of five key statistical metrics, outperforming state-of-the-art algorithms by over 48.03%. Furthermore, we demonstrate that the synthetic trajectories are able to efficiently support practical applications, including mobility prediction and location recommendation.
Read more7/25/2024
📈
0
MobilityGPT: Enhanced Human Mobility Modeling with a GPT model
Ammar Haydari, Dongjie Chen, Zhengfeng Lai, Michael Zhang, Chen-Nee Chuah
Generative models have shown promising results in capturing human mobility characteristics and generating synthetic trajectories. However, it remains challenging to ensure that the generated geospatial mobility data is semantically realistic, including consistent location sequences, and reflects real-world characteristics, such as constraining on geospatial limits. We reformat human mobility modeling as an autoregressive generation task to address these issues, leveraging the Generative Pre-trained Transformer (GPT) architecture. To ensure its controllable generation to alleviate the above challenges, we propose a geospatially-aware generative model, MobilityGPT. We propose a gravity-based sampling method to train a transformer for semantic sequence similarity. Then, we constrained the training process via a road connectivity matrix that provides the connectivity of sequences in trajectory generation, thereby keeping generated trajectories in geospatial limits. Lastly, we proposed to construct a preference dataset for fine-tuning MobilityGPT via Reinforcement Learning from Trajectory Feedback (RLTF) mechanism, which minimizes the travel distance between training and the synthetically generated trajectories. Experiments on real-world datasets demonstrate MobilityGPT's superior performance over state-of-the-art methods in generating high-quality mobility trajectories that are closest to real data in terms of origin-destination similarity, trip length, travel radius, link, and gravity distributions.
Read more5/24/2024

0
Geospatial Trajectory Generation via Efficient Abduction: Deployment for Independent Testing
Divyagna Bavikadi, Dyuman Aditya, Devendra Parkar, Paulo Shakarian, Graham Mueller, Chad Parvis, Gerardo I. Simari
The ability to generate artificial human movement patterns while meeting location and time constraints is an important problem in the security community, particularly as it enables the study of the analog problem of detecting such patterns while maintaining privacy. We frame this problem as an instance of abduction guided by a novel parsimony function represented as an aggregate truth value over an annotated logic program. This approach has the added benefit of affording explainability to an analyst user. By showing that any subset of such a program can provide a lower bound on this parsimony requirement, we are able to abduce movement trajectories efficiently through an informed (i.e., A*) search. We describe how our implementation was enhanced with the application of multiple techniques in order to be scaled and integrated with a cloud-based software stack that included bottom-up rule learning, geolocated knowledge graph retrieval/management, and interfaces with government systems for independently conducted government-run tests for which we provide results. We also report on our own experiments showing that we not only provide exact results but also scale to very large scenarios and provide realistic agent trajectories that can go undetected by machine learning anomaly detectors.
Read more7/10/2024
0
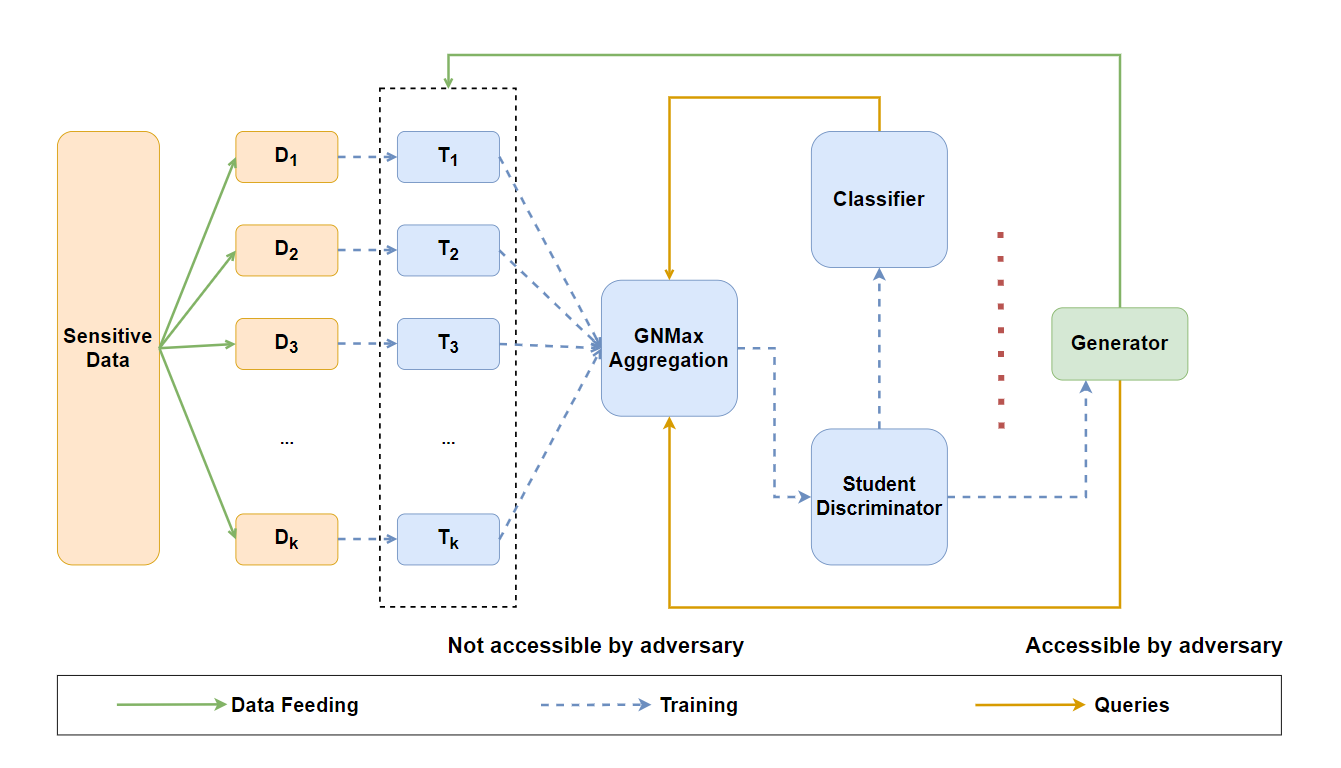
PATE-TripleGAN: Privacy-Preserving Image Synthesis with Gaussian Differential Privacy
Zepeng Jiang, Weiwei Ni, Yifan Zhang
Conditional Generative Adversarial Networks (CGANs) exhibit significant potential in supervised learning model training by virtue of their ability to generate realistic labeled images. However, numerous studies have indicated the privacy leakage risk in CGANs models. The solution DPCGAN, incorporating the differential privacy framework, faces challenges such as heavy reliance on labeled data for model training and potential disruptions to original gradient information due to excessive gradient clipping, making it difficult to ensure model accuracy. To address these challenges, we present a privacy-preserving training framework called PATE-TripleGAN. This framework incorporates a classifier to pre-classify unlabeled data, establishing a three-party min-max game to reduce dependence on labeled data. Furthermore, we present a hybrid gradient desensitization algorithm based on the Private Aggregation of Teacher Ensembles (PATE) framework and Differential Private Stochastic Gradient Descent (DPSGD) method. This algorithm allows the model to retain gradient information more effectively while ensuring privacy protection, thereby enhancing the model's utility. Privacy analysis and extensive experiments affirm that the PATE-TripleGAN model can generate a higher quality labeled image dataset while ensuring the privacy of the training data.
Read more4/22/2024