MobilityGPT: Enhanced Human Mobility Modeling with a GPT model

0
📈
Sign in to get full access
Overview
- Generative models have shown promise in capturing human mobility characteristics and generating synthetic trajectories.
- However, it remains challenging to ensure the generated geospatial mobility data is semantically realistic and reflects real-world characteristics.
- This paper proposes a geospatially-aware generative model, MobilityGPT, to address these issues.
Plain English Explanation
Generative models are a type of artificial intelligence that can create new data, like images or text, that looks similar to real-world examples. Researchers have used these models to try to capture the patterns in how people move around, known as "human mobility," and generate synthetic versions of this data.
However, the generated mobility data doesn't always feel realistic - the locations and routes don't always make sense or match what we see in the real world. The authors of this paper wanted to improve on this by developing a new generative model called MobilityGPT.
The key ideas are:
- Using a type of language model, called a Transformer, that is good at predicting what comes next in a sequence. This helps the model generate mobility data that flows logically from one location to the next.
- Incorporating information about the actual road network and geography to constrain the generated trajectories to realistic paths.
- Fine-tuning the model using reinforcement learning to encourage it to generate trajectories that are close to real-world data in terms of trip length, travel radius, and other metrics.
By incorporating these techniques, the researchers were able to create a model that generates synthetic mobility data that is more true to life compared to previous approaches. This could be useful for applications like traffic modeling, epidemic modeling, or urban planning.
Technical Explanation
The key innovation in this paper is the development of MobilityGPT, a geospatially-aware generative model for human mobility data. The authors frame the problem as an autoregressive generation task, where the model predicts the next location in a sequence given the previous locations.
To ensure the generated trajectories are semantically realistic and geospatially constrained, the authors propose several techniques:
-
Gravity-based Sampling: The model is trained using a gravity-based sampling method, which encourages the generated sequences to be similar to real-world mobility patterns in terms of origin-destination similarity, trip length, and travel radius.
-
Road Connectivity Constraint: The training process is constrained by a road connectivity matrix that encodes the physical limitations of the road network. This helps keep the generated trajectories within realistic geospatial bounds.
-
Reinforcement Learning from Trajectory Feedback (RLTF): The authors fine-tune the model using a reinforcement learning approach that minimizes the travel distance between the training and generated trajectories. This further improves the realism of the synthetic data.
Experiments on real-world datasets show that MobilityGPT outperforms other state-of-the-art methods in generating high-quality mobility trajectories that closely match the statistics of real-world data.
Critical Analysis
The authors have made a compelling case for the need to improve the realism of generated mobility data and have proposed an innovative solution in the form of MobilityGPT. The incorporation of geospatial constraints and reinforcement learning is a valuable contribution to the field of human mobility prediction and traffic modeling.
However, the paper could have delved deeper into the potential limitations of the approach. For instance, the model may struggle to capture complex, higher-order dependencies in real-world mobility patterns, especially in densely populated urban areas with intricate road networks. Additionally, the reliance on a road connectivity matrix could limit the model's ability to generalize to new or rapidly changing environments.
Further research could explore ways to enable the model to learn these higher-level spatio-temporal relationships or to adapt the model to dynamic environments without heavily relying on predefined geospatial constraints.
Conclusion
This paper presents MobilityGPT, a geospatially-aware generative model for human mobility data that addresses the challenge of ensuring semantically realistic and geospatially constrained synthetic trajectories. By incorporating techniques like gravity-based sampling, road connectivity constraints, and reinforcement learning, the authors have demonstrated significant improvements in the quality of generated mobility data compared to previous approaches.
The potential applications of this research span fields such as traffic modeling, epidemic modeling, and urban planning, where high-fidelity synthetic mobility data can be invaluable for testing and evaluating various scenarios. As the field of human mobility modeling continues to evolve, the techniques introduced in this paper offer a promising path forward for generating more realistic and useful synthetic data.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📈
0
MobilityGPT: Enhanced Human Mobility Modeling with a GPT model
Ammar Haydari, Dongjie Chen, Zhengfeng Lai, Michael Zhang, Chen-Nee Chuah
Generative models have shown promising results in capturing human mobility characteristics and generating synthetic trajectories. However, it remains challenging to ensure that the generated geospatial mobility data is semantically realistic, including consistent location sequences, and reflects real-world characteristics, such as constraining on geospatial limits. We reformat human mobility modeling as an autoregressive generation task to address these issues, leveraging the Generative Pre-trained Transformer (GPT) architecture. To ensure its controllable generation to alleviate the above challenges, we propose a geospatially-aware generative model, MobilityGPT. We propose a gravity-based sampling method to train a transformer for semantic sequence similarity. Then, we constrained the training process via a road connectivity matrix that provides the connectivity of sequences in trajectory generation, thereby keeping generated trajectories in geospatial limits. Lastly, we proposed to construct a preference dataset for fine-tuning MobilityGPT via Reinforcement Learning from Trajectory Feedback (RLTF) mechanism, which minimizes the travel distance between training and the synthetically generated trajectories. Experiments on real-world datasets demonstrate MobilityGPT's superior performance over state-of-the-art methods in generating high-quality mobility trajectories that are closest to real data in terms of origin-destination similarity, trip length, travel radius, link, and gravity distributions.
Read more5/24/2024

0
Pretrained Mobility Transformer: A Foundation Model for Human Mobility
Xinhua Wu, Haoyu He, Yanchao Wang, Qi Wang
Ubiquitous mobile devices are generating vast amounts of location-based service data that reveal how individuals navigate and utilize urban spaces in detail. In this study, we utilize these extensive, unlabeled sequences of user trajectories to develop a foundation model for understanding urban space and human mobility. We introduce the textbf{P}retrained textbf{M}obility textbf{T}ransformer (PMT), which leverages the transformer architecture to process user trajectories in an autoregressive manner, converting geographical areas into tokens and embedding spatial and temporal information within these representations. Experiments conducted in three U.S. metropolitan areas over a two-month period demonstrate PMT's ability to capture underlying geographic and socio-demographic characteristics of regions. The proposed PMT excels across various downstream tasks, including next-location prediction, trajectory imputation, and trajectory generation. These results support PMT's capability and effectiveness in decoding complex patterns of human mobility, offering new insights into urban spatial functionality and individual mobility preferences.
Read more6/6/2024

0
PateGail: A Privacy-Preserving Mobility Trajectory Generator with Imitation Learning
Huandong Wang, Changzheng Gao, Yuchen Wu, Depeng Jin, Lina Yao, Yong Li
Generating human mobility trajectories is of great importance to solve the lack of large-scale trajectory data in numerous applications, which is caused by privacy concerns. However, existing mobility trajectory generation methods still require real-world human trajectories centrally collected as the training data, where there exists an inescapable risk of privacy leakage. To overcome this limitation, in this paper, we propose PateGail, a privacy-preserving imitation learning model to generate mobility trajectories, which utilizes the powerful generative adversary imitation learning model to simulate the decision-making process of humans. Further, in order to protect user privacy, we train this model collectively based on decentralized mobility data stored in user devices, where personal discriminators are trained locally to distinguish and reward the real and generated human trajectories. In the training process, only the generated trajectories and their rewards obtained based on personal discriminators are shared between the server and devices, whose privacy is further preserved by our proposed perturbation mechanisms with theoretical proof to satisfy differential privacy. Further, to better model the human decision-making process, we propose a novel aggregation mechanism of the rewards obtained from personal discriminators. We theoretically prove that under the reward obtained based on the aggregation mechanism, our proposed model maximizes the lower bound of the discounted total rewards of users. Extensive experiments show that the trajectories generated by our model are able to resemble real-world trajectories in terms of five key statistical metrics, outperforming state-of-the-art algorithms by over 48.03%. Furthermore, we demonstrate that the synthetic trajectories are able to efficiently support practical applications, including mobility prediction and location recommendation.
Read more7/25/2024
0
BehaviorGPT: Smart Agent Simulation for Autonomous Driving with Next-Patch Prediction
Zikang Zhou, Haibo Hu, Xinhong Chen, Jianping Wang, Nan Guan, Kui Wu, Yung-Hui Li, Yu-Kai Huang, Chun Jason Xue
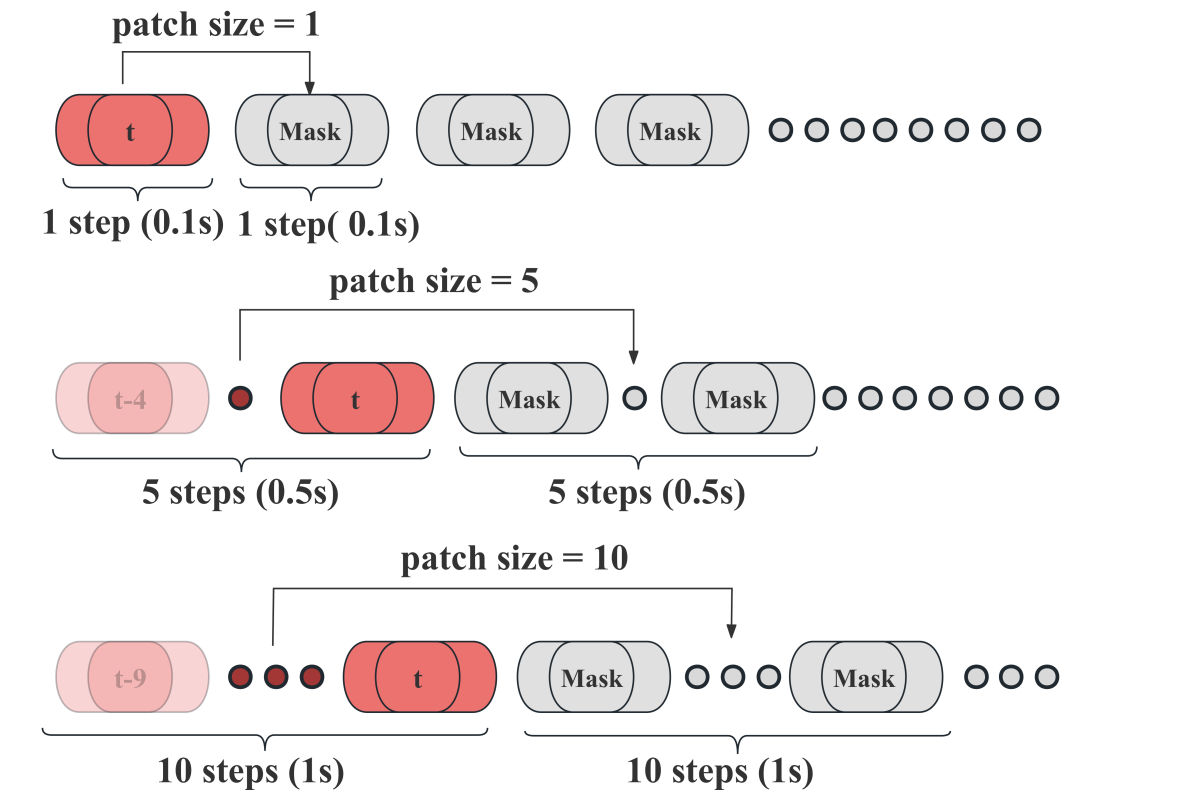
Simulating realistic interactions among traffic agents is crucial for efficiently validating the safety of autonomous driving systems. Existing leading simulators primarily use an encoder-decoder structure to encode the historical trajectories for future simulation. However, such a paradigm complicates the model architecture, and the manual separation of history and future trajectories leads to low data utilization. To address these challenges, we propose Behavior Generative Pre-trained Transformers (BehaviorGPT), a decoder-only, autoregressive architecture designed to simulate the sequential motion of multiple agents. Crucially, our approach discards the traditional separation between history and future, treating each time step as the current one, resulting in a simpler, more parameter- and data-efficient design that scales seamlessly with data and computation. Additionally, we introduce the Next-Patch Prediction Paradigm (NP3), which enables models to reason at the patch level of trajectories and capture long-range spatial-temporal interactions. BehaviorGPT ranks first across several metrics on the Waymo Sim Agents Benchmark, demonstrating its exceptional performance in multi-agent and agent-map interactions. We outperformed state-of-the-art models with a realism score of 0.741 and improved the minADE metric to 1.540, with an approximately 91.6% reduction in model parameters.
Read more5/28/2024