Pedestrian Motion Prediction Using Transformer-based Behavior Clustering and Data-Driven Reachability Analysis

0

Sign in to get full access
Overview
- This paper proposes a novel approach for pedestrian motion prediction that combines transformer-based behavior clustering and data-driven reachability analysis.
- The key ideas are to use transformer networks to cluster pedestrian behaviors and then leverage that information to predict future motions through reachability analysis.
- The method is evaluated on several pedestrian trajectory datasets and shown to outperform state-of-the-art approaches.
Plain English Explanation
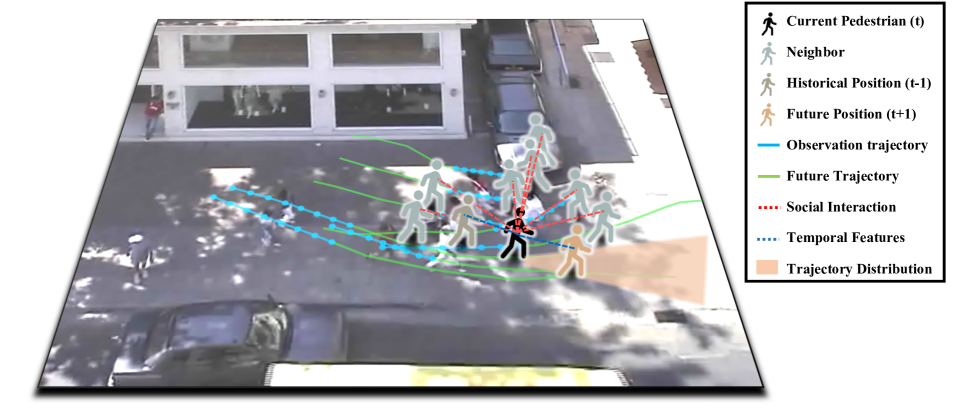
The paper presents a way to predict where pedestrians will move in the future. It does this by first using a transformer neural network to identify common patterns in how people move. This allows it to group pedestrians into different "behavior clusters" based on their typical movements.
Then, the approach uses this clustering information to analyze how far each pedestrian is likely to travel in the future. This "reachability analysis" looks at the historical data to determine the maximum distance a pedestrian in a given cluster is likely to cover. By combining the behavior clustering and reachability analysis, the method can make accurate forecasts of where pedestrians will go next.
The key benefit of this approach is that it can adapt to different pedestrian behaviors, rather than relying on a one-size-fits-all model. And the transformer-based architecture allows it to efficiently process and learn from large amounts of data on pedestrian movements.
Technical Explanation
The paper proposes a two-stage framework for pedestrian motion prediction. In the first stage, a transformer-based behavior clustering module is used to group pedestrians into different behavior clusters based on their past trajectories. This allows the model to capture the diverse movement patterns exhibited by different individuals or groups.
The behavior clustering is done by feeding the past trajectory data into a transformer encoder network, which learns a compact representation of each pedestrian's motion. These representations are then clustered using a k-means algorithm to identify the dominant behavioral archetypes.
In the second stage, a data-driven reachability analysis module is used to predict the future motion of each pedestrian. This module leverages the behavior cluster information to estimate the maximum distance a pedestrian in a given cluster is likely to travel. By combining the cluster-specific reachability estimates, the model can make accurate forecasts of the pedestrian's future position.
The authors evaluate their approach on several benchmark pedestrian trajectory datasets and show that it outperforms state-of-the-art methods in terms of prediction accuracy. They also demonstrate the model's ability to transfer learning to new environments and handle social interactions between pedestrians.
Critical Analysis
The paper presents a well-designed and thorough approach to pedestrian motion prediction. The use of transformer-based behavior clustering is a novel and effective way to capture the diverse movement patterns exhibited by different individuals and groups. And the data-driven reachability analysis leverages this clustering information to make accurate forecasts of future positions.
One potential limitation is that the method relies on having access to sufficient historical data on pedestrian trajectories. In environments with limited data or new scenarios, the performance of the reachability analysis module may be reduced. The authors acknowledge this and suggest that unsupervised learning techniques could be used to address this limitation.
Additionally, while the paper demonstrates the model's ability to handle social interactions, it may not fully capture the complex dynamics and dependencies between pedestrians. Further research could explore more advanced methods for modeling these social factors.
Overall, the paper presents a promising approach that could have important applications in areas like autonomous navigation, urban planning, and security monitoring. The combination of transformer-based behavior clustering and data-driven reachability analysis is a novel and effective way to address the challenging problem of pedestrian motion prediction.
Conclusion
This paper introduces a novel framework for pedestrian motion prediction that leverages transformer-based behavior clustering and data-driven reachability analysis. By identifying common movement patterns and estimating the maximum reachable distances, the method can accurately forecast the future positions of pedestrians.
The evaluation results demonstrate the approach's effectiveness and ability to adapt to diverse pedestrian behaviors. While the method has some limitations, it represents a significant advancement in the field of pedestrian motion prediction and could have important real-world applications. The use of transformer networks and reachability analysis is a promising direction for further research in this area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Pedestrian Motion Prediction Using Transformer-based Behavior Clustering and Data-Driven Reachability Analysis
Kleio Fragkedaki, Frank J. Jiang, Karl H. Johansson, Jonas M{aa}rtensson
In this work, we present a transformer-based framework for predicting future pedestrian states based on clustered historical trajectory data. In previous studies, researchers propose enhancing pedestrian trajectory predictions by using manually crafted labels to categorize pedestrian behaviors and intentions. However, these approaches often only capture a limited range of pedestrian behaviors and introduce human bias into the predictions. To alleviate the dependency on manually crafted labels, we utilize a transformer encoder coupled with hierarchical density-based clustering to automatically identify diverse behavior patterns, and use these clusters in data-driven reachability analysis. By using a transformer-based approach, we seek to enhance the representation of pedestrian trajectories and uncover characteristics or features that are subsequently used to group trajectories into different behavior clusters. We show that these behavior clusters can be used with data-driven reachability analysis, yielding an end-to-end data-driven approach to predicting the future motion of pedestrians. We train and evaluate our approach on a real pedestrian dataset, showcasing its effectiveness in forecasting pedestrian movements.
Read more8/29/2024
0
Attention-aware Social Graph Transformer Networks for Stochastic Trajectory Prediction
Yao Liu, Binghao Li, Xianzhi Wang, Claude Sammut, Lina Yao
Trajectory prediction is fundamental to various intelligent technologies, such as autonomous driving and robotics. The motion prediction of pedestrians and vehicles helps emergency braking, reduces collisions, and improves traffic safety. Current trajectory prediction research faces problems of complex social interactions, high dynamics and multi-modality. Especially, it still has limitations in long-time prediction. We propose Attention-aware Social Graph Transformer Networks for multi-modal trajectory prediction. We combine Graph Convolutional Networks and Transformer Networks by generating stable resolution pseudo-images from Spatio-temporal graphs through a designed stacking and interception method. Furthermore, we design the attention-aware module to handle social interaction information in scenarios involving mixed pedestrian-vehicle traffic. Thus, we maintain the advantages of the Graph and Transformer, i.e., the ability to aggregate information over an arbitrary number of neighbors and the ability to perform complex time-dependent data processing. We conduct experiments on datasets involving pedestrian, vehicle, and mixed trajectories, respectively. Our results demonstrate that our model minimizes displacement errors across various metrics and significantly reduces the likelihood of collisions. It is worth noting that our model effectively reduces the final displacement error, illustrating the ability of our model to predict for a long time.
Read more5/14/2024
0
Transfer Learning Study of Motion Transformer-based Trajectory Predictions
Lars Ullrich, Alex McMaster, Knut Graichen
Trajectory planning in autonomous driving is highly dependent on predicting the emergent behavior of other road users. Learning-based methods are currently showing impressive results in simulation-based challenges, with transformer-based architectures technologically leading the way. Ultimately, however, predictions are needed in the real world. In addition to the shifts from simulation to the real world, many vehicle- and country-specific shifts, i.e. differences in sensor systems, fusion and perception algorithms as well as traffic rules and laws, are on the agenda. Since models that can cover all system setups and design domains at once are not yet foreseeable, model adaptation plays a central role. Therefore, a simulation-based study on transfer learning techniques is conducted on basis of a transformer-based model. Furthermore, the study aims to provide insights into possible trade-offs between computational time and performance to support effective transfers into the real world.
Read more8/9/2024
0
Context-aware Multi-task Learning for Pedestrian Intent and Trajectory Prediction
Farzeen Munir, Tomasz Piotr Kucner
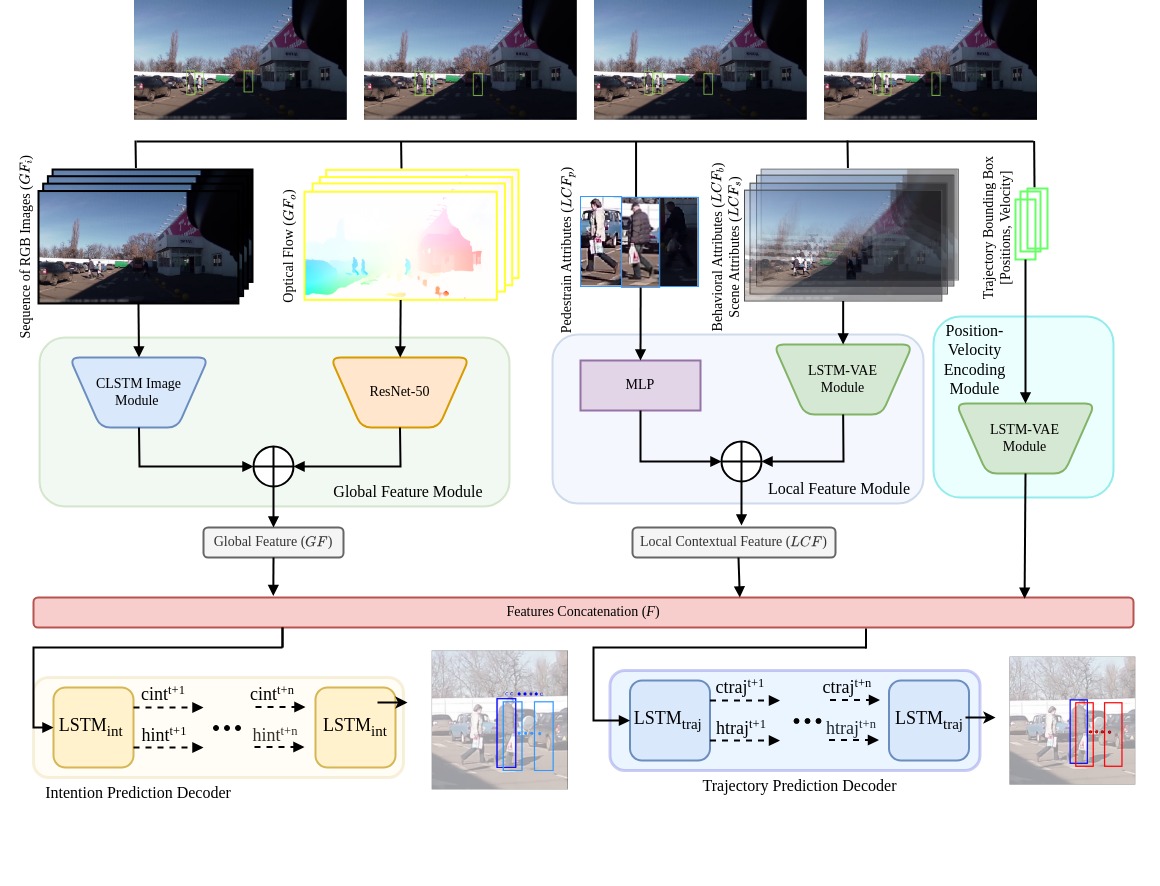
The advancement of socially-aware autonomous vehicles hinges on precise modeling of human behavior. Within this broad paradigm, the specific challenge lies in accurately predicting pedestrian's trajectory and intention. Traditional methodologies have leaned heavily on historical trajectory data, frequently overlooking vital contextual cues such as pedestrian-specific traits and environmental factors. Furthermore, there's a notable knowledge gap as trajectory and intention prediction have largely been approached as separate problems, despite their mutual dependence. To bridge this gap, we introduce PTINet (Pedestrian Trajectory and Intention Prediction Network), which jointly learns the trajectory and intention prediction by combining past trajectory observations, local contextual features (individual pedestrian behaviors), and global features (signs, markings etc.). The efficacy of our approach is evaluated on widely used public datasets: JAAD and PIE, where it has demonstrated superior performance over existing state-of-the-art models in trajectory and intention prediction. The results from our experiments and ablation studies robustly validate PTINet's effectiveness in jointly exploring intention and trajectory prediction for pedestrian behaviour modelling. The experimental evaluation indicates the advantage of using global and local contextual features for pedestrian trajectory and intention prediction. The effectiveness of PTINet in predicting pedestrian behavior paves the way for the development of automated systems capable of seamlessly interacting with pedestrians in urban settings.
Read more7/25/2024