Context-aware Multi-task Learning for Pedestrian Intent and Trajectory Prediction

0
Sign in to get full access
Overview
- This research paper proposes a context-aware multi-task learning approach for predicting pedestrian intent and trajectory.
- The key idea is to leverage contextual information, such as the surrounding environment and pedestrian behaviors, to jointly learn pedestrian intent (e.g., crossing or not) and future trajectory.
- The authors demonstrate the effectiveness of their approach on public pedestrian datasets, showing improved performance compared to prior methods.
Plain English Explanation
Predicting how pedestrians will move and what they intend to do is an important challenge for autonomous vehicles and robots to navigate safely around people. This paper presents a new machine learning approach to tackle this problem.
The core idea is to use context-aware multi-task learning - this means the system learns to predict both a pedestrian's intent (whether they plan to cross the street or not) and their future trajectory at the same time, while also taking into account the surrounding environment and other contextual factors that may influence their behavior.
By jointly learning these two related tasks - intent and trajectory prediction - the model can leverage the connections between them to make more accurate forecasts. The authors show this approach outperforms prior methods on standard pedestrian datasets, bringing us closer to enabling safe autonomous vehicles that can better anticipate and respond to pedestrian movements.
Technical Explanation
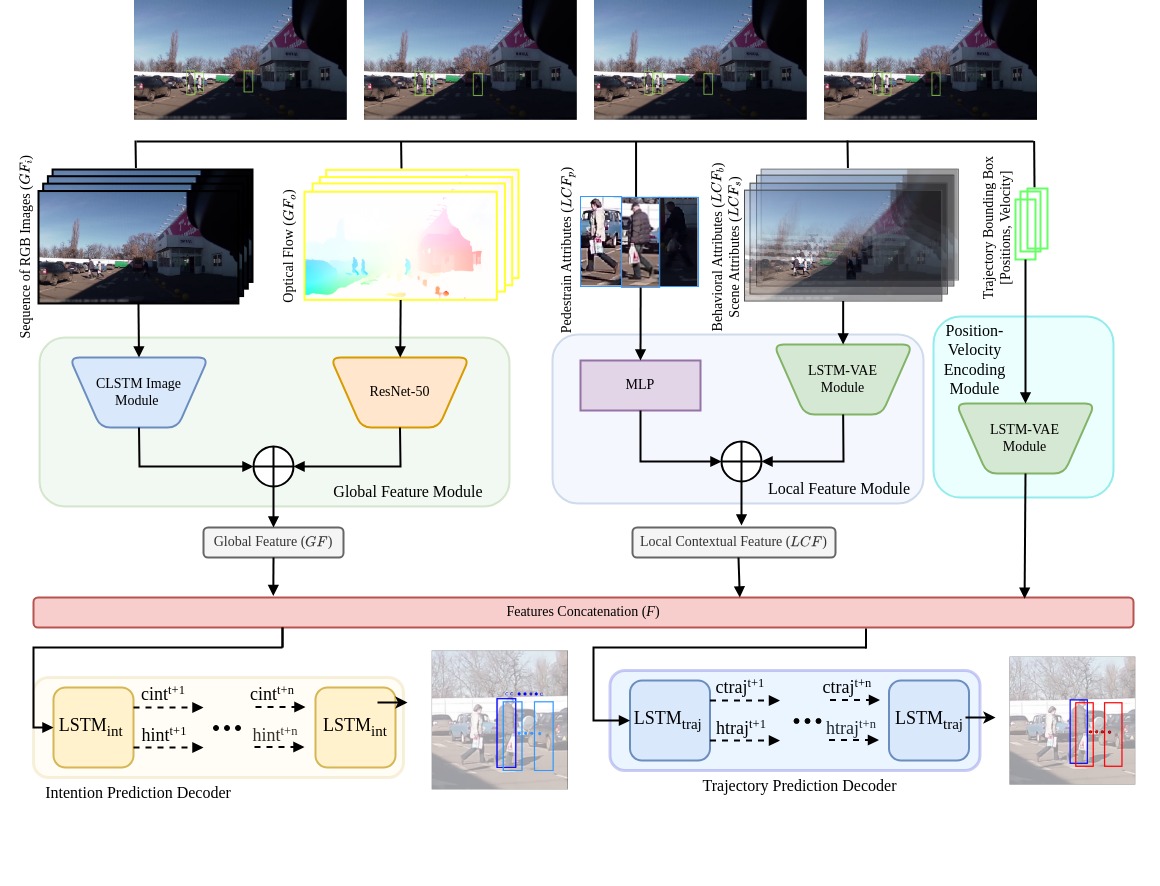
The proposed framework, called Context-aware Multi-task Learning (CAML), consists of an encoder-decoder architecture. The encoder takes in the current state of the pedestrian (position, velocity, etc.) as well as contextual information about the surrounding environment. This is then used to jointly predict the pedestrian's future trajectory and their intent to cross or not cross the street.
The key innovation is the use of multi-task learning, where the model is trained to optimize both the trajectory prediction and intent classification objectives simultaneously. This allows the model to leverage the inherent relationship between a pedestrian's motion and their underlying intent. The contextual information, such as the location of roads, crosswalks, and other obstacles, is incorporated through an attention mechanism to selectively focus on the most relevant environmental factors.
The authors evaluate CAML on two public pedestrian datasets, demonstrating significant improvements in both intent prediction and trajectory forecasting compared to prior state-of-the-art approaches. This highlights the benefits of the proposed context-aware multi-task learning framework for enhancing the safety and reliability of autonomous systems interacting with pedestrians.
Critical Analysis
The paper provides a well-designed and thorough evaluation of the CAML approach, including comparisons to several baseline methods on standard benchmarks. The results convincingly demonstrate the advantages of the proposed joint learning framework over prior work.
One potential limitation is that the paper does not deeply explore the relative contributions of the different contextual features used in the model. Further analysis could shed light on which types of environmental information are most critical for accurate pedestrian intent and trajectory prediction.
Additionally, while the experiments cover a range of pedestrian behaviors, it would be valuable to see how CAML performs in more challenging real-world scenarios, such as crowded urban environments or situations with complex interactions between multiple pedestrians and vehicles.
Overall, this research represents a promising step towards more robust and generalizable methods for anticipating pedestrian behavior, which is a crucial capability for improving the safety and effectiveness of autonomous systems navigating shared spaces.
Conclusion
This paper presents a novel context-aware multi-task learning framework for jointly predicting pedestrian intent and future trajectory. By leveraging the inherent connections between these two related tasks, along with contextual environmental information, the proposed CAML model demonstrates superior performance compared to prior state-of-the-art approaches.
The findings of this work contribute to the broader effort of enhancing the safety and reliability of autonomous systems, such as self-driving cars, by enabling them to better anticipate and respond to the complex behaviors of pedestrians. As autonomous technologies continue to advance, techniques like CAML will play an important role in ensuring safe and effective interactions between machines and humans in shared public spaces.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!