Perceive, Reflect, and Plan: Designing LLM Agent for Goal-Directed City Navigation without Instructions

0
Sign in to get full access
Overview
- Designed an LLM agent for goal-directed city navigation without instructions
- Leveraged perception, reflection, and planning capabilities to navigate cities
- Tested the agent in a simulated environment with encouraging results
Plain English Explanation
The researchers developed an AI agent that can navigate through a city to reach a target location, without being given any instructions. Instead, the agent uses its perception capabilities to observe the environment, reflects on the best course of action, and then plans its route to the goal. This is a significant advancement, as most existing navigation systems rely on having detailed maps and instructions provided.
The researchers tested their agent in a simulated city environment and found that it was able to successfully navigate to the target location in many cases. This suggests that the agent's perception, reflection, and planning capabilities are effective for goal-directed navigation, even in complex urban settings without any prior instructions.
Technical Explanation
The researchers developed an LLM-based agent that can navigate through a city to reach a target location without being given any instructions. The agent has three key components:
-
Perception: The agent uses computer vision techniques to observe and understand its surroundings, including buildings, roads, landmarks, and other environmental features.
-
Reflection: The agent reflects on the observed environment and uses large language models to reason about the best course of action to reach the goal.
-
Planning: The agent plans a sequence of actions to navigate through the city, taking into account the perceived environment and the reflections on the best strategy.
The researchers tested this agent in a simulated city environment and found that it was able to successfully navigate to the target location in many cases, demonstrating the effectiveness of the perception, reflection, and planning capabilities.
Critical Analysis
The researchers acknowledge several limitations and areas for further research:
- The simulated environment, while realistic, may not fully capture the complexity of real-world city navigation.
- The agent's performance may be sensitive to the quality and completeness of the perception module, which could be further improved.
- The reflection and planning components could be enhanced with more advanced reasoning and decision-making capabilities.
Additionally, one could question the generalizability of the approach, as it may be heavily dependent on the specific city environment and the target locations used in the study. Further research is needed to assess the agent's performance in diverse city settings and with a wider range of navigation tasks.
Conclusion
This research represents a significant step towards developing autonomous agents that can navigate through complex urban environments without relying on pre-existing maps or instructions. The ability to perceive, reflect, and plan for goal-directed navigation has important implications for various applications, such as assistive robotics, self-driving vehicles, and urban planning. While the current system has some limitations, the overall approach demonstrates the potential of leveraging advanced AI techniques for versatile and adaptable navigation in the real world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Perceive, Reflect, and Plan: Designing LLM Agent for Goal-Directed City Navigation without Instructions
Qingbin Zeng, Qinglong Yang, Shunan Dong, Heming Du, Liang Zheng, Fengli Xu, Yong Li
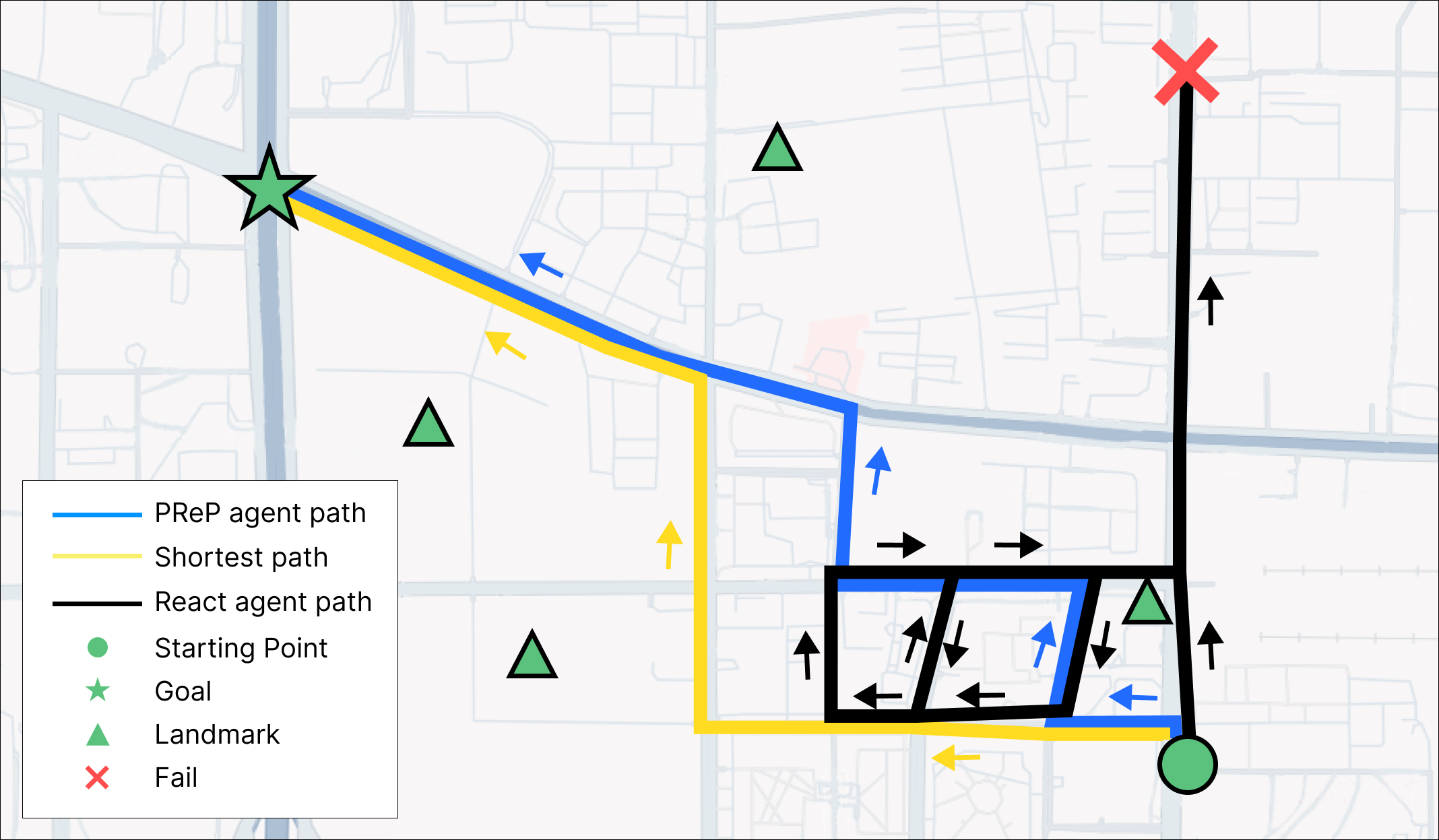
This paper considers a scenario in city navigation: an AI agent is provided with language descriptions of the goal location with respect to some well-known landmarks; By only observing the scene around, including recognizing landmarks and road network connections, the agent has to make decisions to navigate to the goal location without instructions. This problem is very challenging, because it requires agent to establish self-position and acquire spatial representation of complex urban environment, where landmarks are often invisible. In the absence of navigation instructions, such abilities are vital for the agent to make high-quality decisions in long-range city navigation. With the emergent reasoning ability of large language models (LLMs), a tempting baseline is to prompt LLMs to react on each observation and make decisions accordingly. However, this baseline has very poor performance that the agent often repeatedly visits same locations and make short-sighted, inconsistent decisions. To address these issues, this paper introduces a novel agentic workflow featured by its abilities to perceive, reflect and plan. Specifically, we find LLaVA-7B can be fine-tuned to perceive the direction and distance of landmarks with sufficient accuracy for city navigation. Moreover, reflection is achieved through a memory mechanism, where past experiences are stored and can be retrieved with current perception for effective decision argumentation. Planning uses reflection results to produce long-term plans, which can avoid short-sighted decisions in long-range navigation. We show the designed workflow significantly improves navigation ability of the LLM agent compared with the state-of-the-art baselines.
Read more9/6/2024

0
Smart Language Agents in Real-World Planning
Annabelle Miin, Timothy Wei
Comprehensive planning agents have been a long term goal in the field of artificial intelligence. Recent innovations in Natural Language Processing have yielded success through the advent of Large Language Models (LLMs). We seek to improve the travel-planning capability of such LLMs by extending upon the work of the previous paper TravelPlanner. Our objective is to explore a new method of using LLMs to improve the travel planning experience. We focus specifically on the sole-planning mode of travel planning; that is, the agent is given necessary reference information, and its goal is to create a comprehensive plan from the reference information. While this does not simulate the real-world we feel that an optimization of the sole-planning capability of a travel planning agent will still be able to enhance the overall user experience. We propose a semi-automated prompt generation framework which combines the LLM-automated prompt and human-in-the-loop to iteratively refine the prompt to improve the LLM performance. Our result shows that LLM automated prompt has its limitations and human-in-the-loop greatly improves the performance by $139%$ with one single iteration.
Read more7/30/2024
💬
0
LASP: Surveying the State-of-the-Art in Large Language Model-Assisted AI Planning
Haoming Li, Zhaoliang Chen, Jonathan Zhang, Fei Liu
Effective planning is essential for the success of any task, from organizing a vacation to routing autonomous vehicles and developing corporate strategies. It involves setting goals, formulating plans, and allocating resources to achieve them. LLMs are particularly well-suited for automated planning due to their strong capabilities in commonsense reasoning. They can deduce a sequence of actions needed to achieve a goal from a given state and identify an effective course of action. However, it is frequently observed that plans generated through direct prompting often fail upon execution. Our survey aims to highlight the existing challenges in planning with language models, focusing on key areas such as embodied environments, optimal scheduling, competitive and cooperative games, task decomposition, reasoning, and planning. Through this study, we explore how LLMs transform AI planning and provide unique insights into the future of LM-assisted planning.
Read more9/4/2024

0
MC-GPT: Empowering Vision-and-Language Navigation with Memory Map and Reasoning Chains
Zhaohuan Zhan, Lisha Yu, Sijie Yu, Guang Tan
In the Vision-and-Language Navigation (VLN) task, the agent is required to navigate to a destination following a natural language instruction. While learning-based approaches have been a major solution to the task, they suffer from high training costs and lack of interpretability. Recently, Large Language Models (LLMs) have emerged as a promising tool for VLN due to their strong generalization capabilities. However, existing LLM-based methods face limitations in memory construction and diversity of navigation strategies. To address these challenges, we propose a suite of techniques. Firstly, we introduce a method to maintain a topological map that stores navigation history, retaining information about viewpoints, objects, and their spatial relationships. This map also serves as a global action space. Additionally, we present a Navigation Chain of Thoughts module, leveraging human navigation examples to enrich navigation strategy diversity. Finally, we establish a pipeline that integrates navigational memory and strategies with perception and action prediction modules. Experimental results on the REVERIE and R2R datasets show that our method effectively enhances the navigation ability of the LLM and improves the interpretability of navigation reasoning.
Read more8/13/2024