PhysHand: A Hand Simulation Model with Physiological Geometry, Physical Deformation, and Accurate Contact Handling

0

Sign in to get full access
Overview
- A new hand simulation model called PhysHand that accurately represents the physiological geometry, physical deformation, and contact handling of the human hand
- Developed to enable realistic simulations of hand-object interactions for applications like robotics, virtual reality, and computer graphics
- Key innovations include a physiologically-inspired hand model, a physics-based deformation model, and an accurate contact handling algorithm
Plain English Explanation
The paper presents a new hand simulation model called PhysHand that aims to provide a more realistic representation of the human hand. The goal is to enable more accurate simulations of how the hand interacts with objects, which is important for applications like robotics, virtual reality, and computer graphics.
The researchers developed several key innovations to achieve this. First, they created a physiologically-inspired hand model that captures the detailed geometry and structure of the bones, joints, and ligaments in the human hand. This allows the simulation to accurately reflect the natural movement and deformation of the hand.
Secondly, they implemented a physics-based deformation model that realistically simulates how the soft tissues in the hand, like the skin and muscles, deform and respond to forces and contact with objects. This helps the simulation look and behave more lifelike.
Finally, the researchers developed an accurate contact handling algorithm that can precisely model the interactions between the hand and any objects it comes into contact with. This is crucial for representing realistic grasping and manipulation behaviors.
Overall, the PhysHand model provides a significant advance in the realism and fidelity of hand simulations, which could have important implications for a variety of fields.
Technical Explanation
The paper introduces the PhysHand model, a new hand simulation framework that aims to capture the physiological geometry, physical deformation, and accurate contact handling of the human hand.
To achieve this, the researchers developed several key technical components. First, they created a physiologically-inspired hand model that represents the detailed bone and joint structure of the hand, including the metacarpals, phalanges, and ligaments that connect them. This allows the simulation to accurately reflect the natural movement and range of motion of the hand.
Next, they implemented a physics-based deformation model to simulate the soft tissue dynamics of the hand. This includes modeling the skin, muscle, and fat layers, and how they deform and interact in response to external forces. The researchers used a combination of finite element and mass-spring methods to capture these complex soft tissue behaviors.
Finally, the researchers developed an accurate contact handling algorithm to model the interactions between the hand and any objects it manipulates. This includes detecting collisions, computing contact forces, and updating the hand's and object's motions accordingly. The algorithm uses a novel contact point formulation and a parallel optimization solver to achieve real-time performance.
The researchers evaluated PhysHand through a series of experiments, demonstrating its ability to realistically simulate a variety of hand-object interactions, including grasping, manipulation, and deformation of soft objects. The model was shown to outperform previous hand simulation approaches in terms of both physical accuracy and computational efficiency.
Critical Analysis
The paper presents a compelling advance in hand simulation technology with the PhysHand model. The researchers have clearly put a lot of thought and effort into developing a more physiologically accurate and physically realistic representation of the human hand.
One potential limitation mentioned in the paper is the computational complexity of the model, which could make it challenging to deploy in real-time applications with limited processing power, such as on mobile devices or embedded systems. The researchers note that they have worked to optimize the performance, but further advancements in this area could expand the model's practical applications.
Additionally, while the experiments demonstrate the model's capabilities in simulating a range of hand-object interactions, it would be valuable to see how it performs in even more complex and diverse scenarios. Exploring the model's robustness and generalizability to a wider variety of tasks and environments could help further validate its effectiveness.
Overall, the PhysHand model represents a significant step forward in hand simulation technology. Its ability to capture the physiological and physical nuances of the human hand could have important implications for fields like robotics, virtual reality, and computer graphics, where realistic hand-object interactions are crucial.
Conclusion
The PhysHand model presented in this paper provides a new and more advanced approach to simulating the human hand. By incorporating physiologically-inspired geometry, physics-based deformation, and accurate contact handling, the researchers have developed a hand simulation framework that is significantly more realistic and accurate than previous models.
This advancement could have far-reaching implications, enabling more realistic and immersive experiences in virtual reality, more natural and intuitive control interfaces for robotics, and more visually compelling hand animations in computer graphics. As the model continues to be refined and optimized, it has the potential to become a valuable tool for a wide range of applications that require realistic hand-object interactions.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
PhysHand: A Hand Simulation Model with Physiological Geometry, Physical Deformation, and Accurate Contact Handling
Mingyang Sun, Dongliang Kou, Ruisheng Yuan, Dingkang Yang, Peng Zhai, Xiao Zhao, Yang Jiang, Xiong Li, Jingchen Li, Lihua Zhang
In virtual Hand-Object Interaction (HOI) scenarios, the authenticity of the hand's deformation is important to immersive experience, such as natural manipulation or tactile feedback. Unrealistic deformation arises from simplified hand geometry, neglect of the different physics attributes of the hand, and penetration due to imprecise contact handling. To address these problems, we propose PhysHand, a novel hand simulation model, which enhances the realism of deformation in HOI. First, we construct a physiologically plausible geometry, a layered mesh with a skin-flesh-skeleton structure. Second, to satisfy the distinct physics features of different soft tissues, a constraint-based dynamics framework is adopted with carefully designed layer-corresponding constraints to maintain flesh attached and skin smooth. Finally, we employ an SDF-based method to eliminate the penetration caused by contacts and enhance its accuracy by introducing a novel multi-resolution querying strategy. Extensive experiments have been conducted to demonstrate the outstanding performance of PhysHand in calculating deformations and handling contacts. Compared to existing methods, our PhysHand: 1) can compute both physiologically and physically plausible deformation; 2) significantly reduces the depth and count of penetration in HOI.
Read more9/10/2024
0
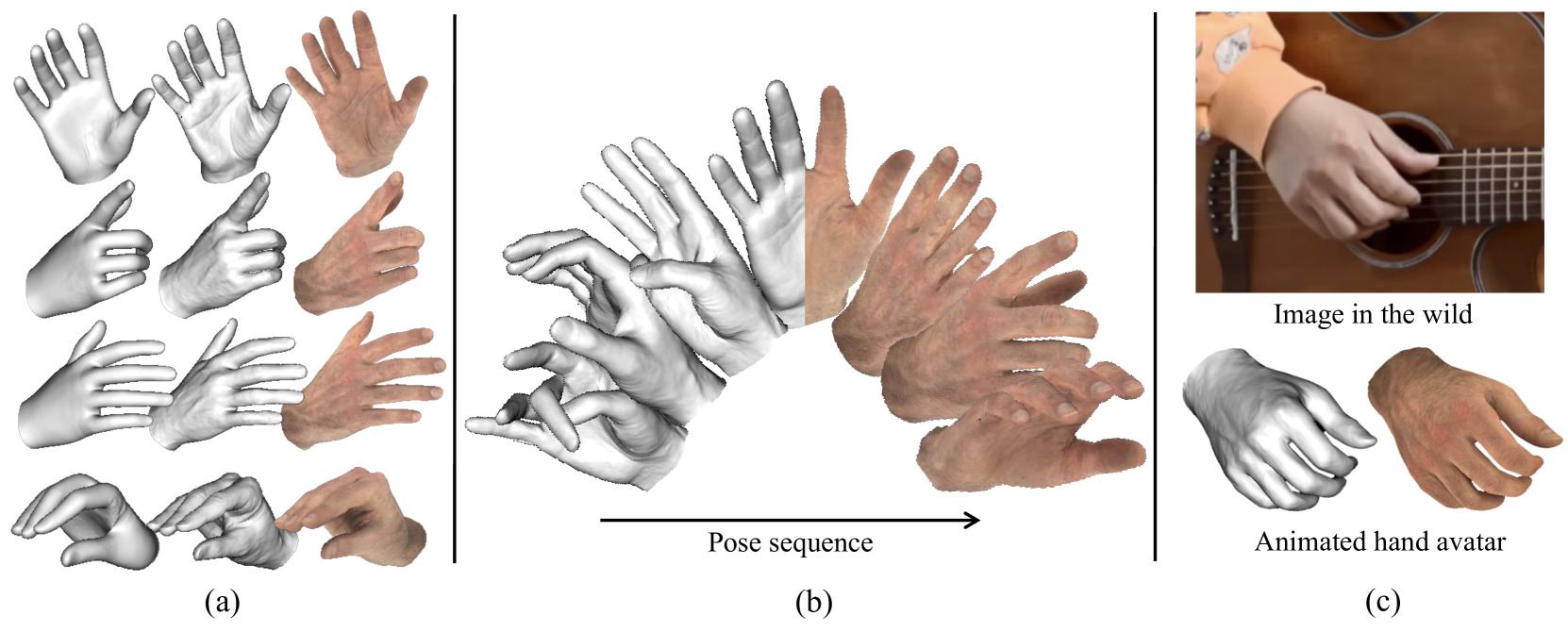
XHand: Real-time Expressive Hand Avatar
Qijun Gan, Zijie Zhou, Jianke Zhu
Hand avatars play a pivotal role in a wide array of digital interfaces, enhancing user immersion and facilitating natural interaction within virtual environments. While previous studies have focused on photo-realistic hand rendering, little attention has been paid to reconstruct the hand geometry with fine details, which is essential to rendering quality. In the realms of extended reality and gaming, on-the-fly rendering becomes imperative. To this end, we introduce an expressive hand avatar, named XHand, that is designed to comprehensively generate hand shape, appearance, and deformations in real-time. To obtain fine-grained hand meshes, we make use of three feature embedding modules to predict hand deformation displacements, albedo, and linear blending skinning weights, respectively. To achieve photo-realistic hand rendering on fine-grained meshes, our method employs a mesh-based neural renderer by leveraging mesh topological consistency and latent codes from embedding modules. During training, a part-aware Laplace smoothing strategy is proposed by incorporating the distinct levels of regularization to effectively maintain the necessary details and eliminate the undesired artifacts. The experimental evaluations on InterHand2.6M and DeepHandMesh datasets demonstrate the efficacy of XHand, which is able to recover high-fidelity geometry and texture for hand animations across diverse poses in real-time. To reproduce our results, we will make the full implementation publicly available at https://github.com/agnJason/XHand.
Read more7/31/2024

0
Real-Time Dynamic Robot-Assisted Hand-Object Interaction via Motion Primitives
Mingqi Yuan, Huijiang Wang, Kai-Fung Chu, Fumiya Iida, Bo Li, Wenjun Zeng
Advances in artificial intelligence (AI) have been propelling the evolution of human-robot interaction (HRI) technologies. However, significant challenges remain in achieving seamless interactions, particularly in tasks requiring physical contact with humans. These challenges arise from the need for accurate real-time perception of human actions, adaptive control algorithms for robots, and the effective coordination between human and robotic movements. In this paper, we propose an approach to enhancing physical HRI with a focus on dynamic robot-assisted hand-object interaction (HOI). Our methodology integrates hand pose estimation, adaptive robot control, and motion primitives to facilitate human-robot collaboration. Specifically, we employ a transformer-based algorithm to perform real-time 3D modeling of human hands from single RGB images, based on which a motion primitives model (MPM) is designed to translate human hand motions into robotic actions. The robot's action implementation is dynamically fine-tuned using the continuously updated 3D hand models. Experimental validations, including a ring-wearing task, demonstrate the system's effectiveness in adapting to real-time movements and assisting in precise task executions.
Read more5/31/2024

0
Physics-aware Hand-object Interaction Denoising
Haowen Luo, Yunze Liu, Li Yi
The credibility and practicality of a reconstructed hand-object interaction sequence depend largely on its physical plausibility. However, due to high occlusions during hand-object interaction, physical plausibility remains a challenging criterion for purely vision-based tracking methods. To address this issue and enhance the results of existing hand trackers, this paper proposes a novel physically-aware hand motion de-noising method. Specifically, we introduce two learned loss terms that explicitly capture two crucial aspects of physical plausibility: grasp credibility and manipulation feasibility. These terms are used to train a physically-aware de-noising network. Qualitative and quantitative experiments demonstrate that our approach significantly improves both fine-grained physical plausibility and overall pose accuracy, surpassing current state-of-the-art de-noising methods.
Read more5/21/2024