Physics-Informed Variational State-Space Gaussian Processes

0
🔎
Sign in to get full access
Overview
- Differential equations are important models used in many scientific and engineering applications.
- With the availability of more data, there is growing interest in data-driven physics-informed models.
- Gaussian processes (GPs) are well-suited for this task as they can model complex, non-linear phenomena while incorporating prior knowledge and quantifying uncertainty.
- Current approaches have limitations in terms of computational scalability or focus only on the temporal setting.
Plain English Explanation
Differential equations are mathematical models that describe how things change over time. They are used extensively in science and engineering to understand and predict a wide range of phenomena, from the motion of planets to the spread of diseases.
As we collect more and more data about the world around us, there is growing interest in developing data-driven models that can make use of this information. One promising approach is to use Gaussian processes (GPs), which are a type of machine learning model that can capture complex, non-linear relationships in data while also quantifying the uncertainty in their predictions.
However, current GP-based methods have some limitations. Some struggle to scale computationally as the amount of data grows, while others only work in the context of modeling changes over time (the "temporal" setting), without considering the spatial relationships in the data.
Technical Explanation
This work introduces a new variational spatio-temporal state-space GP that addresses these limitations. The key innovations are:
- The ability to handle both linear and non-linear physical constraints, which allows the model to incorporate domain knowledge about the underlying processes being studied.
- Efficient linear-in-time computational costs, which enables the model to scale well to large datasets.
The authors demonstrate the effectiveness of their approach on a range of synthetic and real-world problems, showing that it outperforms the current state-of-the-art in terms of both predictive performance and computational efficiency.
Critical Analysis
The paper presents a compelling solution to the limitations of existing GP-based methods for modeling differential equations in spatio-temporal settings. The authors have clearly put a lot of thought into the technical details of their approach and have validated its performance across diverse applications.
However, the paper does not address some potential concerns or areas for future research. For example, it is not clear how the model would handle highly complex or chaotic systems, where the underlying dynamics may be difficult to capture even with a flexible GP-based approach. Additionally, the authors do not discuss how their method could be extended to incorporate other types of prior knowledge or constraints beyond the linear and non-linear forms considered here.
Overall, this work represents a significant advancement in the field of physics-informed machine learning, and the authors have made an important contribution to the ongoing efforts to combine the power of data-driven models with the insights provided by physical principles.
Conclusion
This paper presents a novel variational spatio-temporal state-space GP that can effectively model differential equations while incorporating physical constraints and achieving efficient computational scaling. The authors demonstrate the effectiveness of their approach on a range of applications, outperforming existing methods.
This work represents an important step forward in the field of physics-informed machine learning, and the techniques developed here could have far-reaching implications for scientific and engineering applications that rely on accurately modeling complex, dynamic systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔎
0
Physics-Informed Variational State-Space Gaussian Processes
Oliver Hamelijnck, Arno Solin, Theodoros Damoulas
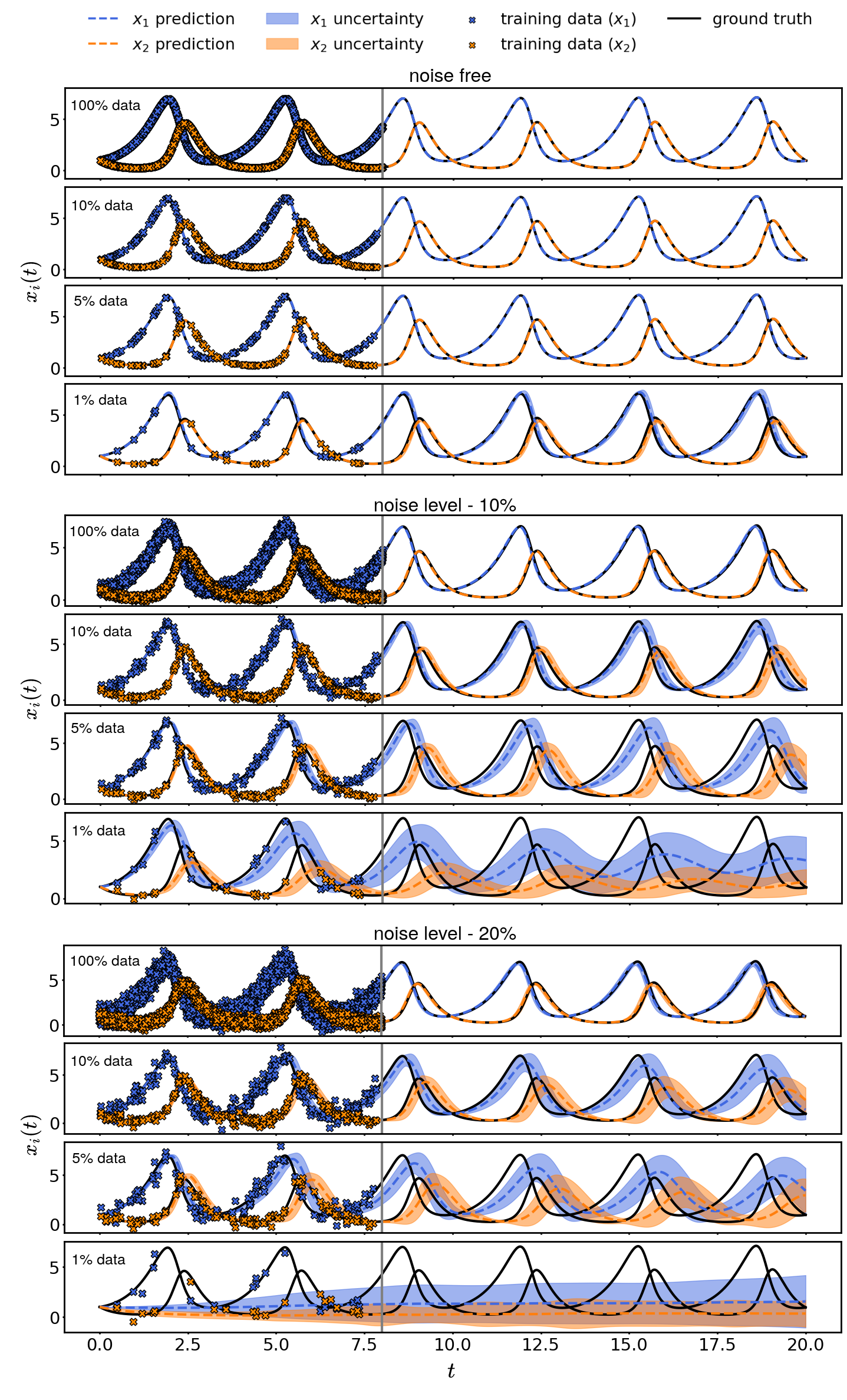
Differential equations are important mechanistic models that are integral to many scientific and engineering applications. With the abundance of available data there has been a growing interest in data-driven physics-informed models. Gaussian processes (GPs) are particularly suited to this task as they can model complex, non-linear phenomena whilst incorporating prior knowledge and quantifying uncertainty. Current approaches have found some success but are limited as they either achieve poor computational scalings or focus only on the temporal setting. This work addresses these issues by introducing a variational spatio-temporal state-space GP that handles linear and non-linear physical constraints while achieving efficient linear-in-time computation costs. We demonstrate our methods in a range of synthetic and real-world settings and outperform the current state-of-the-art in both predictive and computational performance.
Read more9/24/2024
0
Gaussian process learning of nonlinear dynamics
Dongwei Ye, Mengwu Guo
One of the pivotal tasks in scientific machine learning is to represent underlying dynamical systems from time series data. Many methods for such dynamics learning explicitly require the derivatives of state data, which are not directly available and can be approximated conventionally by finite differences. However, the discrete approximations of time derivatives may result in poor estimations when state data are scarce and/or corrupted by noise, thus compromising the predictiveness of the learned dynamical models. To overcome this technical hurdle, we propose a new method that learns nonlinear dynamics through a Bayesian inference of characterizing model parameters. This method leverages a Gaussian process representation of states, and constructs a likelihood function using the correlation between state data and their derivatives, yet prevents explicit evaluations of time derivatives. Through a Bayesian scheme, a probabilistic estimate of the model parameters is given by the posterior distribution, and thus a quantification is facilitated for uncertainties from noisy state data and the learning process. Specifically, we will discuss the applicability of the proposed method to several typical scenarios for dynamical systems: identification and estimation with an affine parametrization, nonlinear parametric approximation without prior knowledge, and general parameter estimation for a given dynamical system.
Read more4/17/2024
0
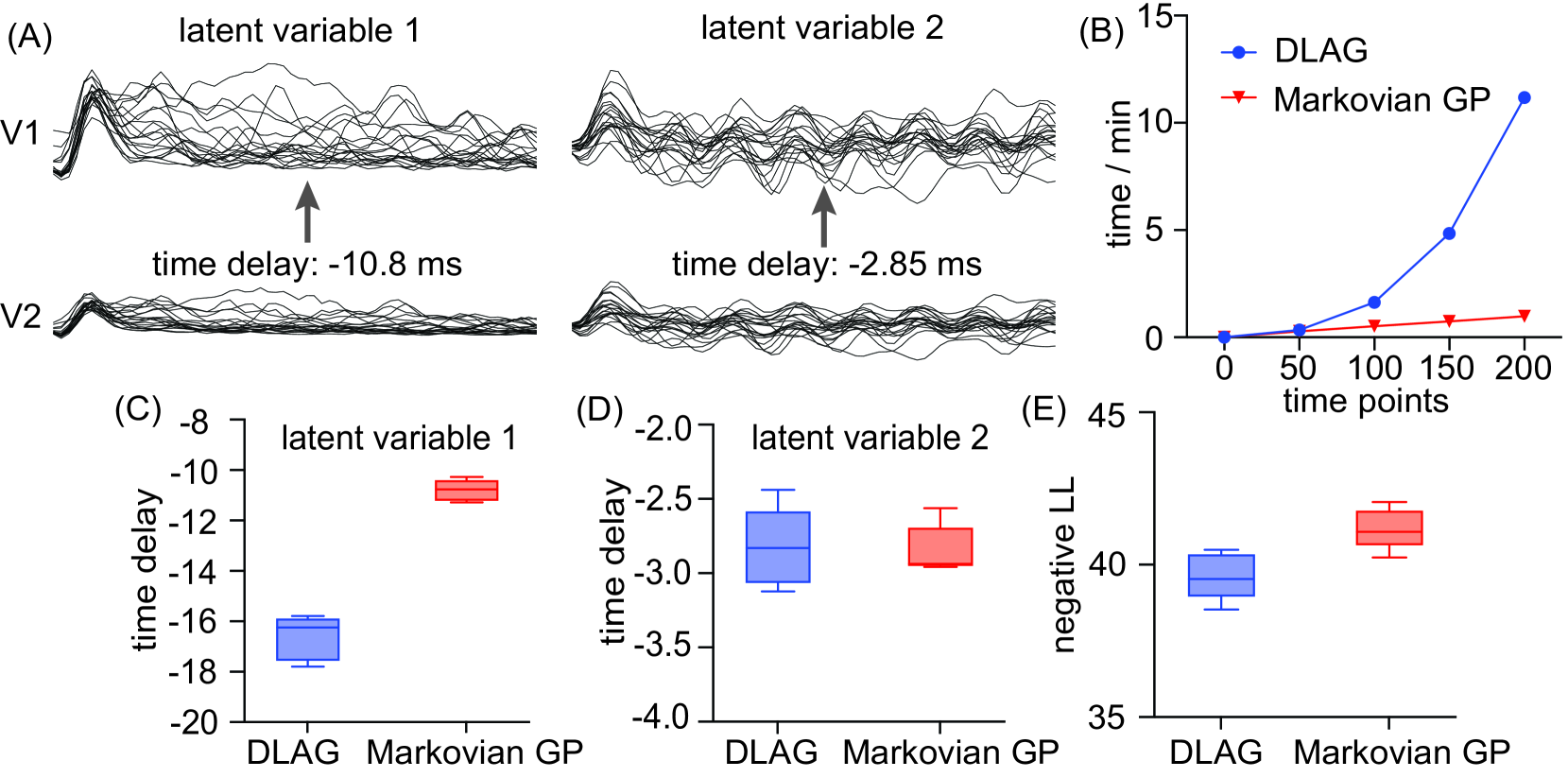
Markovian Gaussian Process: A Universal State-Space Representation for Stationary Temporal Gaussian Process
Weihan Li, Yule Wang, Chengrui Li, Anqi Wu
Gaussian Processes (GPs) and Linear Dynamical Systems (LDSs) are essential time series and dynamic system modeling tools. GPs can handle complex, nonlinear dynamics but are computationally demanding, while LDSs offer efficient computation but lack the expressive power of GPs. To combine their benefits, we introduce a universal method that allows an LDS to mirror stationary temporal GPs. This state-space representation, known as the Markovian Gaussian Process (Markovian GP), leverages the flexibility of kernel functions while maintaining efficient linear computation. Unlike existing GP-LDS conversion methods, which require separability for most multi-output kernels, our approach works universally for single- and multi-output stationary temporal kernels. We evaluate our method by computing covariance, performing regression tasks, and applying it to a neuroscience application, demonstrating that our method provides an accurate state-space representation for stationary temporal GPs.
Read more7/2/2024
🛠️
0
Fully Bayesian Differential Gaussian Processes through Stochastic Differential Equations
Jian Xu, Zhiqi Lin, Min Chen, Junmei Yang, Delu Zeng, John Paisley
Traditional deep Gaussian processes model the data evolution using a discrete hierarchy, whereas differential Gaussian processes (DIFFGPs) represent the evolution as an infinitely deep Gaussian process. However, prior DIFFGP methods often overlook the uncertainty of kernel hyperparameters and assume them to be fixed and time-invariant, failing to leverage the unique synergy between continuous-time models and approximate inference. In this work, we propose a fully Bayesian approach that treats the kernel hyperparameters as random variables and constructs coupled stochastic differential equations (SDEs) to learn their posterior distribution and that of inducing points. By incorporating estimation uncertainty on hyperparameters, our method enhances the model's flexibility and adaptability to complex dynamics. Additionally, our approach provides a time-varying, comprehensive, and realistic posterior approximation through coupling variables using SDE methods. Experimental results demonstrate the advantages of our method over traditional approaches, showcasing its superior performance in terms of flexibility, accuracy, and other metrics. Our work opens up exciting research avenues for advancing Bayesian inference and offers a powerful modeling tool for continuous-time Gaussian processes.
Read more8/13/2024