Point2Building: Reconstructing Buildings from Airborne LiDAR Point Clouds

0

Sign in to get full access
Overview
- Explains a method called Point2Building for reconstructing 3D building models from airborne LiDAR point clouds
- Leverages deep learning techniques to automatically generate high-quality 3D building models from sparse LiDAR data
- Aims to improve upon existing model-based and data-driven approaches for building reconstruction
Plain English Explanation
The Point2Building paper presents a new method for creating detailed 3D models of buildings using LiDAR (Light Detection and Ranging) data collected from aerial surveys. LiDAR systems fire laser beams from aircraft and measure the time it takes for the beams to bounce back, allowing them to create a "point cloud" that represents the 3D structure of objects on the ground.
Reconstructing 3D building models from these sparse LiDAR point clouds is a challenging task that has been approached through both model-based and data-driven techniques in prior research. The Point2Building method takes a data-driven deep learning approach, leveraging neural networks to automatically infer the complete 3D structure of buildings from the incomplete LiDAR data.
The key innovation of Point2Building is its ability to generate high-quality 3D building models that faithfully capture the complex shapes and architectural features of real-world structures. This represents an improvement over previous techniques that struggled to handle the diversity and complexity of building geometries.
Technical Explanation
The Point2Building method works by first segmenting the LiDAR point cloud to isolate individual building regions. It then applies a deep neural network that takes the 3D point cloud of a building as input and outputs a detailed 3D mesh model of the building's structure.
The neural network architecture leverages a PointNet++ backbone to extract features from the unstructured 3D point cloud data. These features are then processed through a series of convolutional and fully connected layers to predict the final 3D mesh representation of the building.
The training process involves exposing the network to a large dataset of real-world LiDAR scans and their corresponding ground truth 3D building models. This allows the network to learn the patterns and relationships between the input point clouds and the desired output meshes.
The experimental results demonstrate that Point2Building can generate 3D building models that are significantly more accurate and visually appealing than those produced by previous state-of-the-art techniques. This indicates the potential for this approach to improve various applications that rely on realistic 3D building reconstructions, such as urban planning, navigation, and virtual/augmented reality.
Critical Analysis
The Point2Building paper provides a comprehensive evaluation of its method and highlights a few potential limitations and areas for future work:
- The dataset used for training and evaluation is relatively small, which could limit the model's ability to generalize to a wide range of building styles and environments. Expanding the dataset size and diversity could further improve the method's performance.
- The current implementation only produces a single, watertight 3D mesh for each building. Extending the method to generate more detailed, semantically-labeled building models (e.g., with separate meshes for roofs, walls, windows, etc.) could be a valuable enhancement.
- While the qualitative and quantitative results are promising, the authors acknowledge that further research is needed to fully address the challenges of building reconstruction in complex urban environments with occlusions, varying point densities, and diverse architectural styles.
Overall, the Point2Building method represents a significant advancement in the field of automatic 3D building reconstruction from airborne LiDAR data. By leveraging deep learning techniques, it can generate high-quality 3D models that outperform previous state-of-the-art approaches. With further refinements and broader testing, this technology could have important real-world applications in urban planning, navigation, and mixed reality applications.
Conclusion
The Point2Building paper presents a novel deep learning-based method for reconstructing detailed 3D building models from sparse airborne LiDAR point clouds. By using a data-driven approach and a sophisticated neural network architecture, the technique can generate high-quality 3D meshes that capture the complex shapes and architectural features of real-world buildings.
The experimental results demonstrate the ability of Point2Building to outperform previous state-of-the-art building reconstruction methods, indicating its potential to improve a wide range of applications that rely on accurate 3D building models. While the current implementation has some limitations, the authors have identified several promising avenues for future research to further enhance the capabilities of this approach.
Overall, the Point2Building method represents an important step forward in the field of 3D building reconstruction, and its continued development could lead to significant advancements in urban planning, navigation, virtual/augmented reality, and other domains that require realistic and detailed 3D building models.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Point2Building: Reconstructing Buildings from Airborne LiDAR Point Clouds
Yujia Liu, Anton Obukhov, Jan Dirk Wegner, Konrad Schindler
We present a learning-based approach to reconstruct buildings as 3D polygonal meshes from airborne LiDAR point clouds. What makes 3D building reconstruction from airborne LiDAR hard is the large diversity of building designs and especially roof shapes, the low and varying point density across the scene, and the often incomplete coverage of building facades due to occlusions by vegetation or to the viewing angle of the sensor. To cope with the diversity of shapes and inhomogeneous and incomplete object coverage, we introduce a generative model that directly predicts 3D polygonal meshes from input point clouds. Our autoregressive model, called Point2Building, iteratively builds up the mesh by generating sequences of vertices and faces. This approach enables our model to adapt flexibly to diverse geometries and building structures. Unlike many existing methods that rely heavily on pre-processing steps like exhaustive plane detection, our model learns directly from the point cloud data, thereby reducing error propagation and increasing the fidelity of the reconstruction. We experimentally validate our method on a collection of airborne LiDAR data of Zurich, Berlin and Tallinn. Our method shows good generalization to diverse urban styles.
Read more7/30/2024
🗣️
0
APC2Mesh: Bridging the gap from occluded building fac{c}ades to full 3D models
Perpetual Hope Akwensi, Akshay Bharadwaj, Ruisheng Wang
The benefits of having digital twins of urban buildings are numerous. However, a major difficulty encountered in their creation from airborne LiDAR point clouds is the effective means of accurately reconstructing significant occlusions amidst point density variations and noise. To bridge the noise/sparsity/occlusion gap and generate high fidelity 3D building models, we propose APC2Mesh which integrates point completion into a 3D reconstruction pipeline, enabling the learning of dense geometrically accurate representation of buildings. Specifically, we leveraged complete points generated from occluded ones as input to a linearized skip attention-based deformation network for 3D mesh reconstruction. In our experiments, conducted on 3 different scenes, we demonstrate that: (1) APC2Mesh delivers comparatively superior results, indicating its efficacy in handling the challenges of occluded airborne building points of diverse styles and complexities. (2) The combination of point completion with typical deep learning-based 3D point cloud reconstruction methods offers a direct and effective solution for reconstructing significantly occluded airborne building points. As such, this neural integration holds promise for advancing the creation of digital twins for urban buildings with greater accuracy and fidelity.
Read more4/4/2024

0
ARCH2S: Dataset, Benchmark and Challenges for Learning Exterior Architectural Structures from Point Clouds
Ka Lung Cheung, Chi Chung Lee
Precise segmentation of architectural structures provides detailed information about various building components, enhancing our understanding and interaction with our built environment. Nevertheless, existing outdoor 3D point cloud datasets have limited and detailed annotations on architectural exteriors due to privacy concerns and the expensive costs of data acquisition and annotation. To overcome this shortfall, this paper introduces a semantically-enriched, photo-realistic 3D architectural models dataset and benchmark for semantic segmentation. It features 4 different building purposes of real-world buildings as well as an open architectural landscape in Hong Kong. Each point cloud is annotated into one of 14 semantic classes.
Read more6/4/2024
0
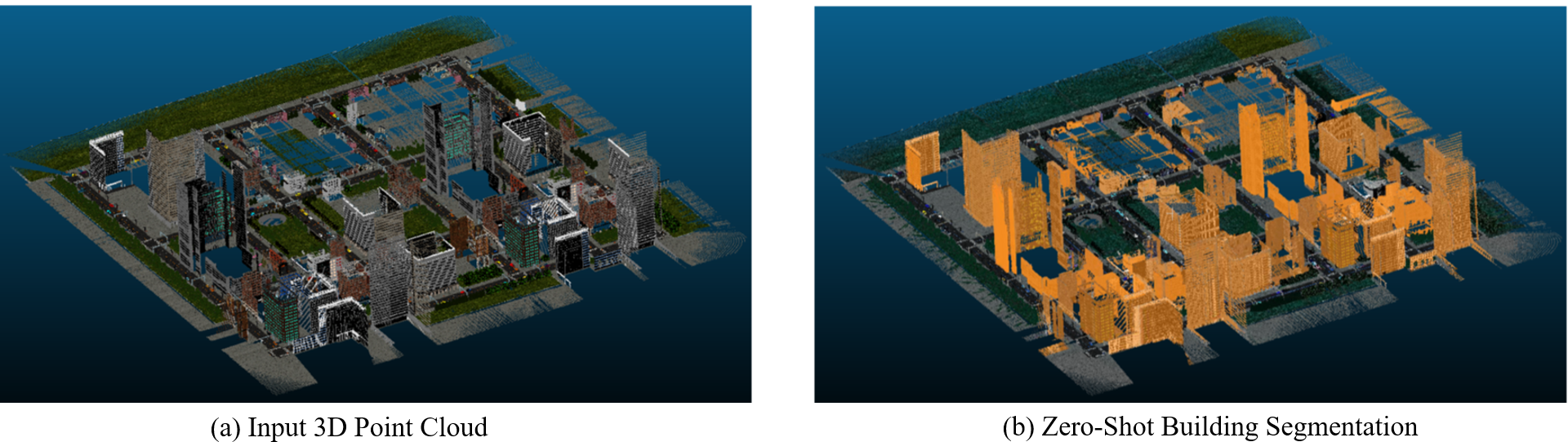
Zero-shot detection of buildings in mobile LiDAR using Language Vision Model
June Moh Goo, Zichao Zeng, Jan Boehm
Recent advances have demonstrated that Language Vision Models (LVMs) surpass the existing State-of-the-Art (SOTA) in two-dimensional (2D) computer vision tasks, motivating attempts to apply LVMs to three-dimensional (3D) data. While LVMs are efficient and effective in addressing various downstream 2D vision tasks without training, they face significant challenges when it comes to point clouds, a representative format for representing 3D data. It is more difficult to extract features from 3D data and there are challenges due to large data sizes and the cost of the collection and labelling, resulting in a notably limited availability of datasets. Moreover, constructing LVMs for point clouds is even more challenging due to the requirements for large amounts of data and training time. To address these issues, our research aims to 1) apply the Grounded SAM through Spherical Projection to transfer 3D to 2D, and 2) experiment with synthetic data to evaluate its effectiveness in bridging the gap between synthetic and real-world data domains. Our approach exhibited high performance with an accuracy of 0.96, an IoU of 0.85, precision of 0.92, recall of 0.91, and an F1 score of 0.92, confirming its potential. However, challenges such as occlusion problems and pixel-level overlaps of multi-label points during spherical image generation remain to be addressed in future studies.
Read more4/16/2024