PowerYOLO: Mixed Precision Model for Hardware Efficient Object Detection with Event Data

0

Sign in to get full access
Overview
• The paper presents a new object detection model called PowerYOLO, which is designed to be efficient for hardware deployment, particularly in embedded vision systems and dynamic vision sensors.
• The key ideas include using a mixed precision approach, leveraging logarithmic quantization and power-of-two quantization to reduce model complexity and enable efficient hardware implementation.
• The model is evaluated on pedestrian and vehicle detection tasks, demonstrating improved performance and power efficiency compared to existing YOLO-based models.
Plain English Explanation
The researchers have developed a new object detection model called PowerYOLO that is designed to run efficiently on hardware, like the kind used in embedded vision systems or dynamic vision sensors. These systems often have limited computational resources, so the goal is to create a model that can detect objects accurately while using less power and memory.
The main techniques used in PowerYOLO are [object Object], [object Object], and [object Object]. These methods allow the model to be made simpler and more efficient, without sacrificing too much accuracy.
The researchers tested PowerYOLO on detecting pedestrians and vehicles, and found that it performed better and used less power compared to other YOLO-based object detection models like [object Object], which are commonly used for these tasks.
Technical Explanation
The key technical innovations in PowerYOLO include:
-
Mixed Precision: The model uses a combination of full-precision (32-bit) and low-precision (16-bit or 8-bit) computations to balance accuracy and efficiency. This allows certain parts of the model to use less memory and computation while maintaining overall performance.
-
Logarithmic Quantization: The researchers apply a logarithmic transformation to the model weights and activations, which reduces the dynamic range required and enables more efficient hardware implementation.
-
Power-of-Two Quantization: The model parameters are further quantized to powers of two, which simplifies multiplication operations and can be efficiently implemented in hardware using bit-shift operations.
The authors evaluate PowerYOLO on pedestrian and vehicle detection datasets, comparing it to state-of-the-art YOLO-based detectors like [object Object] and [object Object]. They show that PowerYOLO achieves better accuracy while using less power, making it a more efficient solution for deployment on embedded hardware like [object Object].
Critical Analysis
The paper provides a comprehensive evaluation of PowerYOLO, including comparisons to other YOLO-based models and analysis of the impact of the various optimization techniques. However, the authors do not discuss any potential limitations or drawbacks of their approach.
One area that could be further explored is the generalizability of the mixed precision and quantization methods to other object detection architectures beyond YOLO. It would be interesting to see how these techniques perform on different model backbones or in other computer vision tasks.
Additionally, the paper could have provided more details on the specific hardware platforms and constraints that motivated the design of PowerYOLO, as well as a deeper discussion of the tradeoffs involved in the various optimization choices.
Conclusion
In summary, the PowerYOLO model presents a promising approach for building efficient object detection systems that can be deployed on hardware-constrained platforms. By leveraging mixed precision, logarithmic quantization, and power-of-two quantization, the researchers have created a model that achieves state-of-the-art performance while being more power-efficient than existing YOLO-based detectors. This work contributes to the ongoing efforts to develop [object Object] that can be widely deployed in various applications, from autonomous vehicles to smart surveillance.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
PowerYOLO: Mixed Precision Model for Hardware Efficient Object Detection with Event Data
Dominika Przewlocka-Rus, Tomasz Kryjak, Marek Gorgon
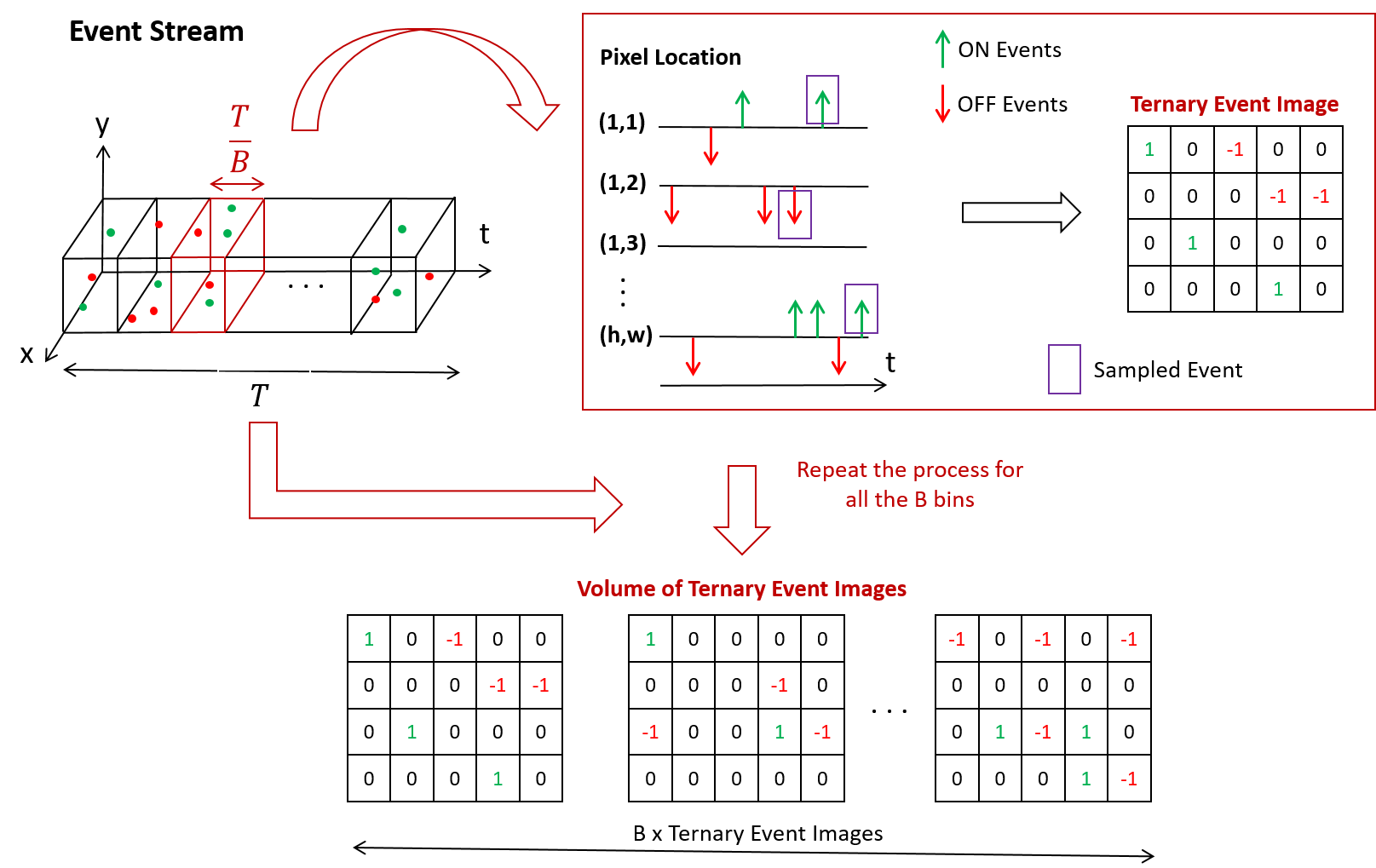
The performance of object detection systems in automotive solutions must be as high as possible, with minimal response time and, due to the often battery-powered operation, low energy consumption. When designing such solutions, we therefore face challenges typical for embedded vision systems: the problem of fitting algorithms of high memory and computational complexity into small low-power devices. In this paper we propose PowerYOLO - a mixed precision solution, which targets three essential elements of such application. First, we propose a system based on a Dynamic Vision Sensor (DVS), a novel sensor, that offers low power requirements and operates well in conditions with variable illumination. It is these features that may make event cameras a preferential choice over frame cameras in some applications. Second, to ensure high accuracy and low memory and computational complexity, we propose to use 4-bit width Powers-of-Two (PoT) quantisation for convolution weights of the YOLO detector, with all other parameters quantised linearly. Finally, we embrace from PoT scheme and replace multiplication with bit-shifting to increase the efficiency of hardware acceleration of such solution, with a special convolution-batch normalisation fusion scheme. The use of specific sensor with PoT quantisation and special batch normalisation fusion leads to a unique system with almost 8x reduction in memory complexity and vast computational simplifications, with relation to a standard approach. This efficient system achieves high accuracy of mAP 0.301 on the GEN1 DVS dataset, marking the new state-of-the-art for such compressed model.
Read more7/12/2024
0
A Recurrent YOLOv8-based framework for Event-Based Object Detection
Diego A. Silva, Kamilya Smagulova, Ahmed Elsheikh, Mohammed E. Fouda, Ahmed M. Eltawil
Object detection is crucial in various cutting-edge applications, such as autonomous vehicles and advanced robotics systems, primarily relying on data from conventional frame-based RGB sensors. However, these sensors often struggle with issues like motion blur and poor performance in challenging lighting conditions. In response to these challenges, event-based cameras have emerged as an innovative paradigm. These cameras, mimicking the human eye, demonstrate superior performance in environments with fast motion and extreme lighting conditions while consuming less power. This study introduces ReYOLOv8, an advanced object detection framework that enhances a leading frame-based detection system with spatiotemporal modeling capabilities. We implemented a low-latency, memory-efficient method for encoding event data to boost the system's performance. We also developed a novel data augmentation technique tailored to leverage the unique attributes of event data, thus improving detection accuracy. Our models outperformed all comparable approaches in the GEN1 dataset, focusing on automotive applications, achieving mean Average Precision (mAP) improvements of 5%, 2.8%, and 2.5% across nano, small, and medium scales, respectively.These enhancements were achieved while reducing the number of trainable parameters by an average of 4.43% and maintaining real-time processing speeds between 9.2ms and 15.5ms. On the PEDRo dataset, which targets robotics applications, our models showed mAP improvements ranging from 9% to 18%, with 14.5x and 3.8x smaller models and an average speed enhancement of 1.67x.
Read more8/13/2024
🔎
1
YOLOv10: Real-Time End-to-End Object Detection
Ao Wang, Hui Chen, Lihao Liu, Kai Chen, Zijia Lin, Jungong Han, Guiguang Ding
Over the past years, YOLOs have emerged as the predominant paradigm in the field of real-time object detection owing to their effective balance between computational cost and detection performance. Researchers have explored the architectural designs, optimization objectives, data augmentation strategies, and others for YOLOs, achieving notable progress. However, the reliance on the non-maximum suppression (NMS) for post-processing hampers the end-to-end deployment of YOLOs and adversely impacts the inference latency. Besides, the design of various components in YOLOs lacks the comprehensive and thorough inspection, resulting in noticeable computational redundancy and limiting the model's capability. It renders the suboptimal efficiency, along with considerable potential for performance improvements. In this work, we aim to further advance the performance-efficiency boundary of YOLOs from both the post-processing and model architecture. To this end, we first present the consistent dual assignments for NMS-free training of YOLOs, which brings competitive performance and low inference latency simultaneously. Moreover, we introduce the holistic efficiency-accuracy driven model design strategy for YOLOs. We comprehensively optimize various components of YOLOs from both efficiency and accuracy perspectives, which greatly reduces the computational overhead and enhances the capability. The outcome of our effort is a new generation of YOLO series for real-time end-to-end object detection, dubbed YOLOv10. Extensive experiments show that YOLOv10 achieves state-of-the-art performance and efficiency across various model scales. For example, our YOLOv10-S is 1.8$times$ faster than RT-DETR-R18 under the similar AP on COCO, meanwhile enjoying 2.8$times$ smaller number of parameters and FLOPs. Compared with YOLOv9-C, YOLOv10-B has 46% less latency and 25% fewer parameters for the same performance.
Read more5/24/2024
🔎
0
MODIPHY: Multimodal Obscured Detection for IoT using PHantom Convolution-Enabled Faster YOLO
Shubhabrata Mukherjee, Cory Beard, Zhu Li
Low-light conditions and occluded scenarios impede object detection in real-world Internet of Things (IoT) applications like autonomous vehicles and security systems. While advanced machine learning models strive for accuracy, their computational demands clash with the limitations of resource-constrained devices, hampering real-time performance. In our current research, we tackle this challenge, by introducing ``YOLO Phantom, one of the smallest YOLO models ever conceived. YOLO Phantom utilizes the novel Phantom Convolution block, achieving comparable accuracy to the latest YOLOv8n model while simultaneously reducing both parameters and model size by 43%, resulting in a significant 19% reduction in Giga Floating-Point Operations (GFLOPs). YOLO Phantom leverages transfer learning on our multimodal RGB-infrared dataset to address low-light and occlusion issues, equipping it with robust vision under adverse conditions. Its real-world efficacy is demonstrated on an IoT platform with advanced low-light and RGB cameras, seamlessly connecting to an AWS-based notification endpoint for efficient real-time object detection. Benchmarks reveal a substantial boost of 17% and 14% in frames per second (FPS) for thermal and RGB detection, respectively, compared to the baseline YOLOv8n model. For community contribution, both the code and the multimodal dataset are available on GitHub.
Read more6/26/2024