Print-N-Grip: A Disposable, Compliant, Scalable and One-Shot 3D-Printed Multi-Fingered Robotic Hand

0

Sign in to get full access
Overview
- The paper introduces "Print-N-Grip", a disposable, compliant, scalable, and one-shot 3D-printed multi-fingered robotic hand.
- The hand is designed to be easily fabricated using readily available low-cost materials and 3D printing.
- It aims to provide a simple, yet effective solution for robotic manipulation tasks.
Plain English Explanation
The researchers have developed a new type of robotic hand that can be easily and cheaply made using 3D printing. This robotic hand is designed to be disposable, flexible, and scalable, meaning it can be produced in large quantities without complex manufacturing processes.
The key features of this robotic hand include:
- Disposable: It is intended to be a one-time use, low-cost solution rather than a durable, high-end robotic hand.
- Compliant: The hand is designed to be flexible and able to conform to the shape of objects, similar to how a human hand can grip various items.
- Scalable: The 3D printing approach allows the hand to be easily mass-produced, making it a practical option for many applications.
- One-shot: The entire hand can be fabricated in a single 3D printing process, without the need for additional assembly.
By creating a robotic hand that is cheap, simple to manufacture, and still effective at gripping objects, the researchers aim to make robotics more accessible and practical for a wider range of tasks and users. This could have applications in areas like logistics, manufacturing, or even disaster response, where low-cost, disposable robotic hands could be deployed as needed.
Technical Explanation
The Print-N-Grip robotic hand is designed with several key features to enable its disposable, compliant, and scalable nature. The hand is fabricated using 3D printing, which allows for a one-shot manufacturing process without the need for complex assembly.
The hand's structure is designed to be compliant, with flexible fingers and a soft palm that can conform to the shape of grasped objects. This is achieved through the use of a novel compliant mechanism, which combines rigid and soft materials to create a hybrid design. The fingers are actuated using a simple cable-driven system, further contributing to the hand's compliance and adaptability.
To enable scalability, the researchers have developed a modular design that can be easily replicated and customized as needed. The hand's size and number of fingers can be adjusted to suit different tasks or application requirements. Additionally, the use of low-cost materials and 3D printing makes the production process highly efficient and cost-effective.
The Print-N-Grip hand has been evaluated through various experiments, demonstrating its ability to grasp a wide range of objects with different shapes and sizes. The researchers have also explored the hand's potential for one-time use applications, such as in disaster response scenarios or in industrial settings where disposable grippers may be preferred.
Critical Analysis
The Print-N-Grip robotic hand presents an interesting and novel approach to robotic manipulation, addressing the need for low-cost, easily fabricated solutions. The researchers have successfully demonstrated the hand's compliance, scalability, and one-shot manufacturing capabilities, which are promising features for practical applications.
However, the paper does not provide a comprehensive evaluation of the hand's performance, particularly in comparison to more advanced robotic hands or commercial products. It would be valuable to see how the Print-N-Grip hand compares in terms of grip strength, dexterity, and overall manipulation capabilities. Additionally, the long-term durability and reliability of the disposable design could be an area for further investigation.
The researchers mention the potential for one-time use applications, but the specific scenarios and requirements for such use cases are not discussed in depth. It would be helpful to understand the target market and intended applications more clearly, as well as any potential challenges or limitations that may arise in real-world deployments.
Conclusion
The Print-N-Grip robotic hand represents an innovative approach to creating a low-cost, easily manufactured robotic gripper. By leveraging 3D printing and a compliant, modular design, the researchers have developed a solution that aims to be disposable, scalable, and effective for a range of manipulation tasks.
While the paper demonstrates the technical feasibility of the Print-N-Grip hand, further research and evaluation could help clarify its practical applications and limitations. Addressing performance comparisons, long-term durability, and specific use case requirements would strengthen the overall understanding and potential impact of this technology.
Overall, the Print-N-Grip hand highlights the growing interest in developing accessible and practical robotic solutions that can be widely deployed, potentially opening up new opportunities in fields like logistics, manufacturing, and disaster response.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Print-N-Grip: A Disposable, Compliant, Scalable and One-Shot 3D-Printed Multi-Fingered Robotic Hand
Alon Laron, Eran Sne, Yaron Perets, Avishai Sintov
Robotic hands are an important tool for replacing humans in handling toxic or radioactive materials. However, these are usually highly expensive, and in many cases, once they are contaminated, they cannot be re-used. Some solutions cope with this challenge by 3D printing parts of a tendon-based hand. However, fabrication requires additional assembly steps. Therefore, a novice user may have difficulties fabricating a hand upon contamination of the previous one. We propose the Print-N-Grip (PNG) hand which is a tendon-based underactuated mechanism able to adapt to the shape of objects. The hand is fabricated through one-shot 3D printing with no additional engineering effort, and can accommodate a number of fingers as desired by the practitioner. Due to its low cost, the PNG hand can easily be detached from a universal base for disposing upon contamination, and replaced by a newly printed one. In addition, the PNG hand is scalable such that one can effortlessly resize the computerized model and print. We present the design of the PNG hand along with experiments to show the capabilities and high durability of the hand.
Read more5/21/2024

0
Tactile SoftHand-A: 3D-Printed, Tactile, Highly-underactuated, Anthropomorphic Robot Hand with an Antagonistic Tendon Mechanism
Haoran Li, Christopher J. Ford, Chenghua Lu, Yijiong Lin, Matteo Bianchi, Manuel G. Catalano, Efi Psomopoulou, Nathan F. Lepora
For tendon-driven multi-fingered robotic hands, ensuring grasp adaptability while minimizing the number of actuators needed to provide human-like functionality is a challenging problem. Inspired by the Pisa/IIT SoftHand, this paper introduces a 3D-printed, highly-underactuated, five-finger robotic hand named the Tactile SoftHand-A, which features only two actuators. The dual-tendon design allows for the active control of specific (distal or proximal interphalangeal) joints to adjust the hand's grasp gesture. We have also developed a new design of fully 3D-printed tactile sensor that requires no hand assembly and is printed directly as part of the robotic finger. This sensor is integrated into the fingertips and combined with the antagonistic tendon mechanism to develop a human-hand-guided tactile feedback grasping system. The system can actively mirror human hand gestures, adaptively stabilize grasp gestures upon contact, and adjust grasp gestures to prevent object movement after detecting slippage. Finally, we designed four different experiments to evaluate the novel fingers coupled with the antagonistic mechanism for controlling the robotic hand's gestures, adaptive grasping ability, and human-hand-guided tactile feedback grasping capability. The experimental results demonstrate that the Tactile SoftHand-A can adaptively grasp objects of a wide range of shapes and automatically adjust its gripping gestures upon detecting contact and slippage. Overall, this study points the way towards a class of low-cost, accessible, 3D-printable, underactuated human-like robotic hands, and we openly release the designs to facilitate others to build upon this work. This work is Open-sourced at github.com/SoutheastWind/Tactile_SoftHand_A
Read more6/19/2024

0
Replicating Human Anatomy with Vision Controlled Jetting -- A Pneumatic Musculoskeletal Hand and Forearm
Thomas Buchner (ETH Zurich, Switzerland), Stefan Weirich (ETH Zurich, Switzerland), Alexander M. Kubler (ETH Zurich, Switzerland), Wojciech Matusik (Inkbit, USA, CSAIL, MIT, USA), Robert K. Katzschmann (ETH Zurich, Switzerland)
The functional replication and actuation of complex structures inspired by nature is a longstanding goal for humanity. Creating such complex structures combining soft and rigid features and actuating them with artificial muscles would further our understanding of natural kinematic structures. We printed a biomimetic hand in a single print process comprised of a rigid skeleton, soft joint capsules, tendons, and printed touch sensors. We showed it's actuation using electric motors. In this work, we expand on this work by adding a forearm that is also closely modeled after the human anatomy and replacing the hand's motors with 22 independently controlled pneumatic artificial muscles (PAMs). Our thin, high-strain (up to 30.1%) PAMs match the performance of state-of-the-art artificial muscles at a lower cost. The system showcases human-like dexterity with independent finger movements, demonstrating successful grasping of various objects, ranging from a small, lightweight coin to a large can of 272g in weight. The performance evaluation, based on fingertip and grasping forces along with finger joint range of motion, highlights the system's potential.
Read more5/1/2024
0
Robust Anthropomorphic Robotic Manipulation through Biomimetic Distributed Compliance
Kai Junge, Josie Hughes
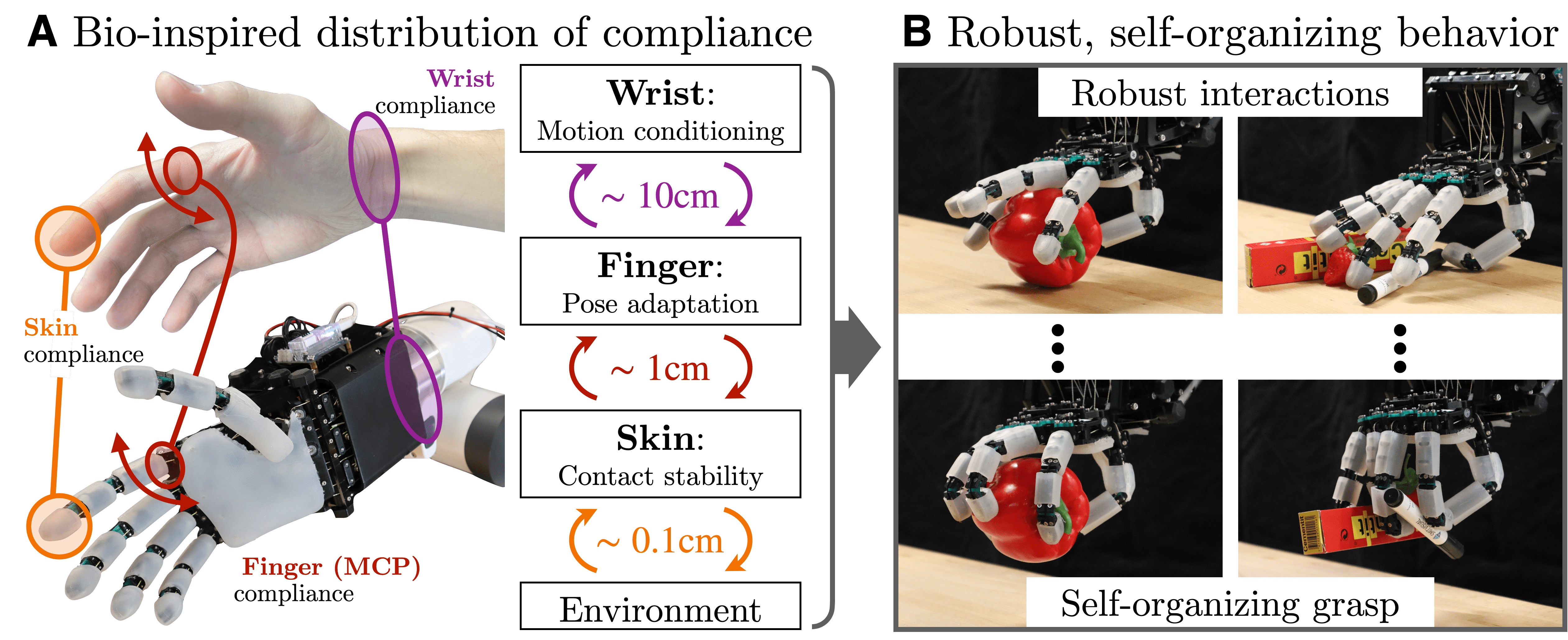
The impressive capabilities of humans to robustly perform manipulation relies on compliant interactions, enabled through the structure and materials spatially distributed in our hands. We propose by mimicking this distributed compliance in an anthropomorphic robotic hand, the open-loop manipulation robustness increases and observe the emergence of human-like behaviours. To achieve this, we introduce the ADAPT Hand equipped with tunable compliance throughout the skin, fingers, and the wrist. Through extensive automated pick-and-place tests, we show the grasping robustness closely mirrors an estimated geometric theoretical limit, while `stress-testing' the robot hand to perform 800+ grasps. Finally, 24 items with largely varying geometries are grasped in a constrained environment with a success rate of 93%. We demonstrate the hand-object self-organization behavior underlines this extreme robustness, where the hand automatically exhibits different grasp types depending on object geometries. Furthermore, the robot grasp type mimics a natural human grasp with a direct similarity of 68%.
Read more4/16/2024