Replicating Human Anatomy with Vision Controlled Jetting -- A Pneumatic Musculoskeletal Hand and Forearm

0

Sign in to get full access
Overview
- This paper presents the design and development of a pneumatic musculoskeletal hand and forearm system that aims to replicate human anatomy and dexterity through vision-controlled jetting.
- The system incorporates a series of pneumatic muscles and tendons to mimic the structure and function of the human hand and forearm, enabling a wide range of grasping and manipulation capabilities.
- The researchers focus on creating a lightweight, energy-efficient, and highly adaptable robotic system that can be controlled using computer vision and machine learning algorithms.
Plain English Explanation
The researchers have created a robotic hand and forearm that is designed to function similarly to the human hand and arm. Instead of using traditional motors or servos, the system uses a series of pneumatic muscles and tendons to move the fingers and wrist. This allows the robotic hand to be lightweight, energy-efficient, and highly adaptable, capable of a wide range of grasping and manipulation tasks.
The key innovation is the use of computer vision and machine learning to control the movement of the robotic hand. By tracking the user's hand movements and gestures, the system can mimic the desired actions in real-time, creating a seamless and intuitive interface. This approach aims to replicate the natural dexterity and flexibility of the human hand, making it well-suited for tasks that require fine motor control and adaptability.
The researchers believe this system could have applications in areas such as robotic assistive devices, teleoperation, and human-robot interaction, where the ability to replicate natural human movement and function is highly valuable.
Technical Explanation
The researchers have developed a pneumatic musculoskeletal hand and forearm system that aims to replicate the anatomy and dexterity of the human hand and arm. The system is composed of a series of pneumatic muscles and tendons that are used to actuate the fingers and wrist, rather than traditional electric motors or servos.
The use of pneumatic muscles and tendons allows the system to be lightweight, energy-efficient, and highly adaptable, enabling a wide range of grasping and manipulation capabilities. The researchers have designed the system to closely mimic the structure and function of the human hand and forearm, with individual fingers, a wrist, and a forearm component.
The key innovation in this work is the use of computer vision and machine learning algorithms to control the movement of the robotic hand. By tracking the user's hand movements and gestures in real-time, the system can automatically adapt the movements of the robotic hand to replicate the desired actions. This online learning approach allows for a seamless and intuitive interface, where the user can naturally control the robotic hand through their own hand movements.
The researchers have conducted extensive experiments to evaluate the performance and capabilities of the pneumatic musculoskeletal hand and forearm system, demonstrating its ability to perform a wide range of grasping and manipulation tasks. The results suggest that this approach could have significant applications in areas such as robotic assistive devices, teleoperation, and human-robot interaction, where the ability to replicate natural human movement and function is highly valuable.
Critical Analysis
The researchers have presented a novel and innovative approach to replicating human anatomy and dexterity in a robotic system. The use of pneumatic muscles and tendons is an interesting and potentially effective solution for creating a lightweight, energy-efficient, and highly adaptable robotic hand and forearm.
One potential limitation of the system is the reliance on computer vision and machine learning for control. While this approach allows for a seamless and intuitive interface, it may be vulnerable to issues such as occlusion, lighting conditions, and the accuracy of the vision algorithms. The researchers acknowledge these challenges and suggest that further work is needed to improve the robustness and reliability of the vision-based control system.
Additionally, the researchers do not provide detailed information on the power consumption and energy efficiency of the pneumatic musculoskeletal system compared to traditional electric motor-based designs. This information would be valuable in assessing the practical implications and potential applications of the technology.
Overall, the researchers have made a significant contribution to the field of robotic manipulation and human-robot interaction. The pneumatic musculoskeletal hand and forearm system demonstrates the potential for replicating human anatomy and dexterity in a highly adaptable and energy-efficient manner. However, further research and development will be needed to address the limitations and challenges identified in this work.
Conclusion
The paper presents a novel approach to replicating human anatomy and dexterity in a robotic system, using a pneumatic musculoskeletal hand and forearm design controlled by computer vision and machine learning algorithms. The researchers have demonstrated the potential for this technology to enable lightweight, energy-efficient, and highly adaptable robotic manipulation capabilities, with potential applications in areas such as robotic assistive devices, teleoperation, and human-robot interaction.
While the work shows promising results, the researchers acknowledge the need for further research to address the limitations of the vision-based control system and to provide more detailed information on the system's power consumption and energy efficiency. Overall, this research represents an important step forward in the development of biomimetic robotic systems that can closely replicate the natural dexterity and flexibility of the human hand and arm.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Replicating Human Anatomy with Vision Controlled Jetting -- A Pneumatic Musculoskeletal Hand and Forearm
Thomas Buchner (ETH Zurich, Switzerland), Stefan Weirich (ETH Zurich, Switzerland), Alexander M. Kubler (ETH Zurich, Switzerland), Wojciech Matusik (Inkbit, USA, CSAIL, MIT, USA), Robert K. Katzschmann (ETH Zurich, Switzerland)
The functional replication and actuation of complex structures inspired by nature is a longstanding goal for humanity. Creating such complex structures combining soft and rigid features and actuating them with artificial muscles would further our understanding of natural kinematic structures. We printed a biomimetic hand in a single print process comprised of a rigid skeleton, soft joint capsules, tendons, and printed touch sensors. We showed it's actuation using electric motors. In this work, we expand on this work by adding a forearm that is also closely modeled after the human anatomy and replacing the hand's motors with 22 independently controlled pneumatic artificial muscles (PAMs). Our thin, high-strain (up to 30.1%) PAMs match the performance of state-of-the-art artificial muscles at a lower cost. The system showcases human-like dexterity with independent finger movements, demonstrating successful grasping of various objects, ranging from a small, lightweight coin to a large can of 272g in weight. The performance evaluation, based on fingertip and grasping forces along with finger joint range of motion, highlights the system's potential.
Read more5/1/2024

0
Human Mimetic Forearm Design with Radioulnar Joint using Miniature Bone-Muscle Modules and Its Applications
Kento Kawaharazuka, Shogo Makino, Masaya Kawamura, Yuki Asano, Yohei Kakiuchi, Kei Okada, Masayuki Inaba
The human forearm is composed of two long, thin bones called the radius and the ulna, and rotates using two axle joints. We aimed to develop a forearm based on the body proportion, weight ratio, muscle arrangement, and joint performance of the human body in order to bring out its benefits. For this, we need to miniaturize the muscle modules. To approach this task, we arranged two muscle motors inside one muscle module, and used the space effectively by utilizing common parts. In addition, we enabled the muscle module to also be used as the bone structure. Moreover, we used miniature motors and developed a way to dissipate the motor heat to the bone structure. Through these approaches, we succeeded in developing a forearm with a radioulnar joint based on the body proportion, weight ratio, muscle arrangement, and joint performance of the human body, while keeping maintainability and reliability. Also, we performed some motions such as soldering, opening a book, turning a screw, and badminton swinging using the benefits of the radioulnar structure, which have not been discussed before, and verified that Kengoro can realize skillful motions using the radioulnar joint like a human.
Read more8/20/2024

0
Vision Controlled Sensorized Prosthetic Hand
Md Abdul Baset Sarker, Juan Pablo S. Sola, Aaron Jones, Evan Laing, Ernesto Sola-Thomas, Masudul H. Imtiaz
This paper presents a sensorized vision-enabled prosthetic hand aimed at replicating a natural hand's performance, functionality, appearance, and comfort. The design goal was to create an accessible substitution with a user-friendly interface requiring little to no training. Our mechanical hand uses a camera and embedded processors to perform most of these tasks. The interfaced pressure sensor is used to get pressure feedback and ensure a safe grasp of the object; an accelerometer is used to detect gestures and release the object. Unlike current EMG-based designs, the prototyped hand does not require personalized training. The details of the design, trade-offs, results, and informing the next iteration are presented in this paper.
Read more7/23/2024
0
Robust Anthropomorphic Robotic Manipulation through Biomimetic Distributed Compliance
Kai Junge, Josie Hughes
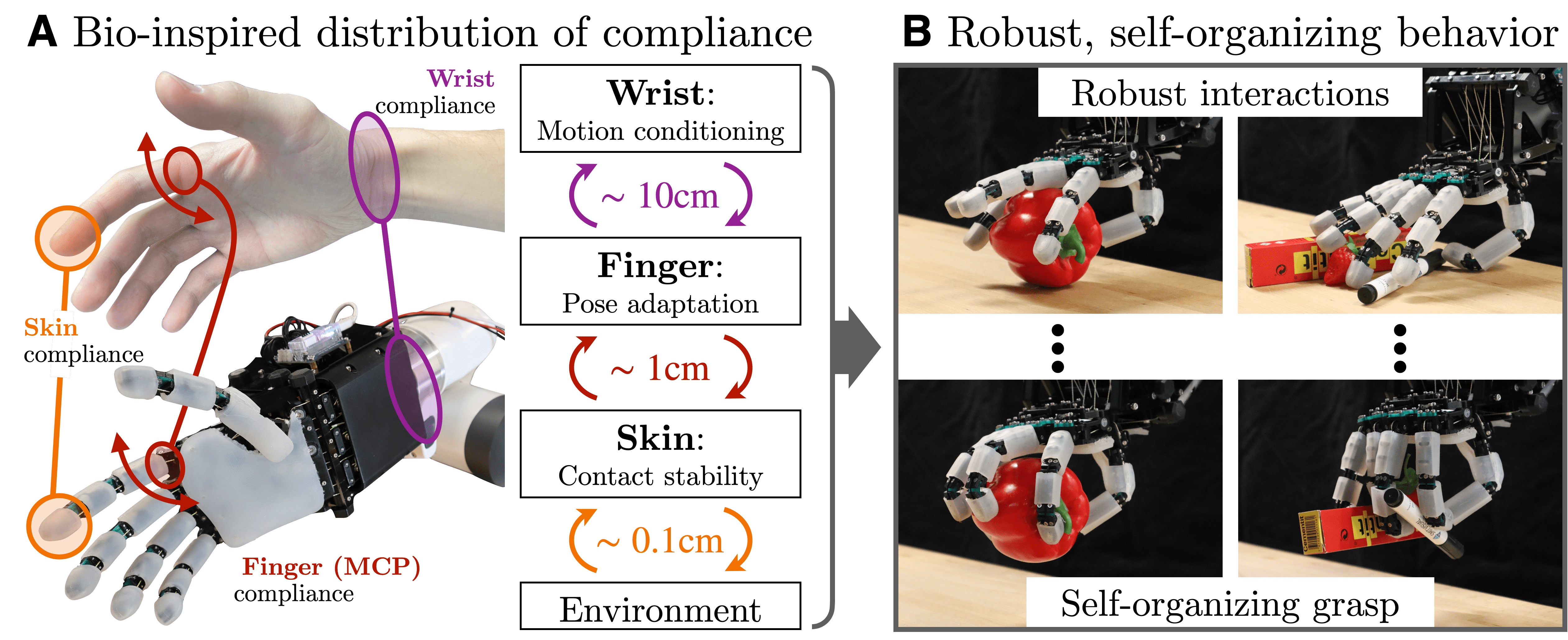
The impressive capabilities of humans to robustly perform manipulation relies on compliant interactions, enabled through the structure and materials spatially distributed in our hands. We propose by mimicking this distributed compliance in an anthropomorphic robotic hand, the open-loop manipulation robustness increases and observe the emergence of human-like behaviours. To achieve this, we introduce the ADAPT Hand equipped with tunable compliance throughout the skin, fingers, and the wrist. Through extensive automated pick-and-place tests, we show the grasping robustness closely mirrors an estimated geometric theoretical limit, while `stress-testing' the robot hand to perform 800+ grasps. Finally, 24 items with largely varying geometries are grasped in a constrained environment with a success rate of 93%. We demonstrate the hand-object self-organization behavior underlines this extreme robustness, where the hand automatically exhibits different grasp types depending on object geometries. Furthermore, the robot grasp type mimics a natural human grasp with a direct similarity of 68%.
Read more4/16/2024