Proprioceptive State Estimation for Amphibious Tactile Sensing

0

Sign in to get full access
Overview
- This paper explores proprioceptive state estimation for amphibious tactile sensing.
- The researchers developed a novel approach to estimating the position and orientation of a tactile sensor based on proprioceptive measurements.
- The proposed method aims to enable dense tactile sensing capabilities for robotics applications that operate in both aerial and aquatic environments.
Plain English Explanation
The paper focuses on a challenge faced by robotic systems that need to operate in both air and water. When a robot's tactile sensors come into contact with an object, the sensors can measure the forces and textures of that object. This tactile information is valuable for tasks like object manipulation and exploration.
However, in order to fully interpret the tactile data, the robot also needs to know the exact position and orientation of the tactile sensor relative to the rest of the robot's body. This is called proprioceptive state estimation. Getting accurate proprioceptive information is tricky when the robot is transitioning between air and water, because the sensor readings can be affected by the change in environment.
The researchers in this paper developed a new method to estimate the proprioceptive state of a tactile sensor in amphibious (air and water) conditions. Their approach uses the sensor's own measurements, combined with a physics-based model of how the sensor should behave, to infer the sensor's position and orientation. This allows the robot to maintain precise tactile sensing capabilities even as it moves between different mediums.
Technical Explanation
The key technical elements of this paper include:
-
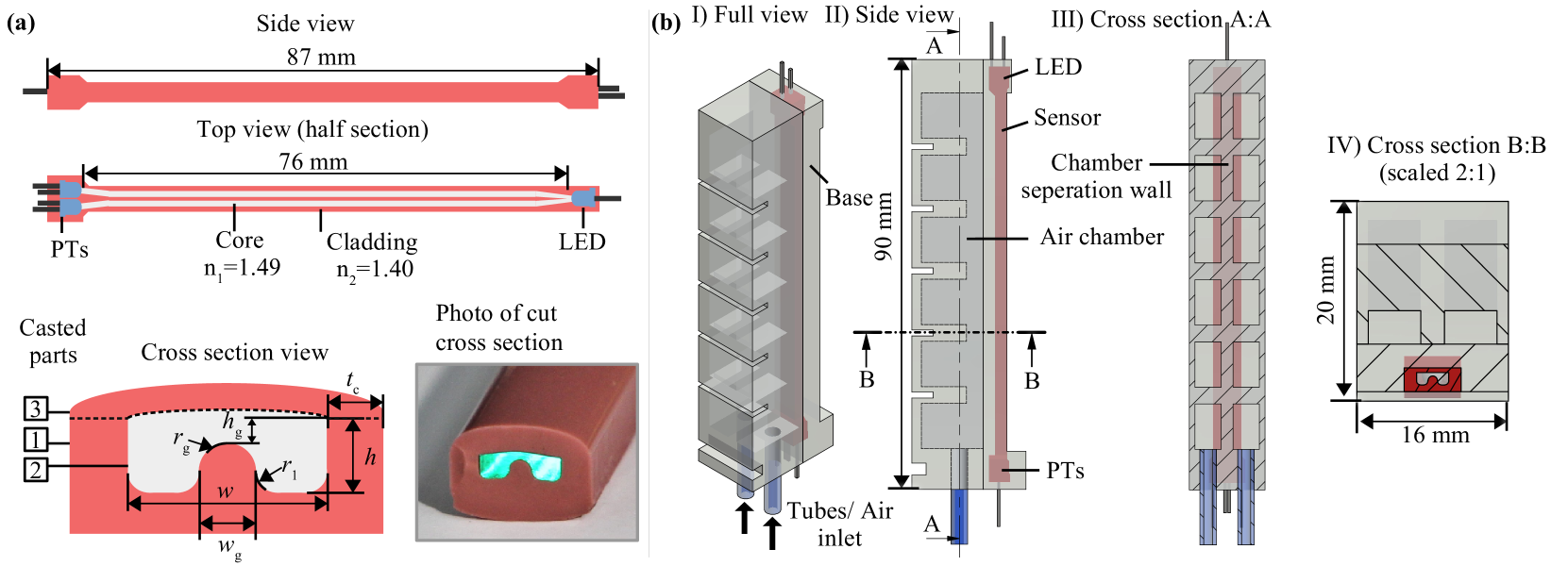
Sensor Design: The researchers used a custom-built amphibious tactile sensor that can operate in both air and water environments. The sensor has integrated force, torque, and position measurement capabilities.
-
Proprioceptive Model: The researchers developed a physics-based model to describe how the tactile sensor's proprioceptive state (position and orientation) relates to its internal sensor measurements. This model accounts for the differences in how the sensor behaves in air versus water.
-
State Estimation: Using the proprioceptive model, the researchers implemented an extended Kalman filter to estimate the current state of the tactile sensor based on its real-time sensor readings. This allows for continuous, accurate tracking of the sensor's position and orientation.
-
Experimental Validation: The researchers evaluated their proprioceptive state estimation approach through a series of experiments, including testing the sensor in different air-water transition scenarios. The results demonstrated the ability to maintain precise tactile sensing across the air-water boundary.
Critical Analysis
The paper provides a comprehensive technical solution for the challenge of proprioceptive state estimation in amphibious tactile sensing. The key strengths are the robust sensor design and the physics-based modeling approach, which enables reliable performance even as the sensor transitions between air and water.
One potential limitation is that the experiments were conducted in a controlled laboratory setting. Further research may be needed to validate the approach in more complex real-world environments with factors like uneven terrain, fluid turbulence, and sensor degradation over time.
Additionally, the paper does not explore the integration of the proprioceptive state estimation with higher-level control or decision-making for the robotic system. Investigating how this technology could be leveraged for improved tactile-based perception, grasping, and manipulation would be an interesting area for future work.
Conclusion
This paper presents an innovative approach to proprioceptive state estimation for amphibious tactile sensing. The researchers developed a novel sensor design and state estimation framework that can maintain precise tracking of a tactile sensor's position and orientation, even as the sensor moves between air and water environments.
This technology has the potential to enable more advanced tactile-based capabilities for robotic systems operating in diverse, unstructured settings. By providing reliable proprioceptive information, the proposed approach could improve a robot's ability to manipulate objects, navigate complex terrains, and explore its surroundings through touch-based perception.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Proprioceptive State Estimation for Amphibious Tactile Sensing
Ning Guo, Xudong Han, Shuqiao Zhong, Zhiyuan Zhou, Jian Lin, Jian S. Dai, Fang Wan, Chaoyang Song
This paper presents a novel vision-based proprioception approach for a soft robotic finger that can estimate and reconstruct tactile interactions in both terrestrial and aquatic environments. The key to this system lies in the finger's unique metamaterial structure, which facilitates omni-directional passive adaptation during grasping, protecting delicate objects across diverse scenarios. A compact in-finger camera captures high-framerate images of the finger's deformation during contact, extracting crucial tactile data in real-time. We present a volumetric discretized model of the soft finger and use the geometry constraints captured by the camera to find the optimal estimation of the deformed shape. The approach is benchmarked using a motion capture system with sparse markers and a haptic device with dense measurements. Both results show state-of-the-art accuracies, with a median error of 1.96 mm for overall body deformation, corresponding to 2.1% of the finger's length. More importantly, the state estimation is robust in both on-land and underwater environments as we demonstrate its usage for underwater object shape sensing. This combination of passive adaptation and real-time tactile sensing paves the way for amphibious robotic grasping applications.
Read more7/23/2024
0
Enhanced Model-Free Dynamic State Estimation for a Soft Robot Finger Using an Embedded Optical Waveguide Sensor
Henrik Krauss, Kenjiro Takemura
In this letter, an advanced stretchable optical waveguide sensor is implemented into a multidirectional PneuNet soft actuator to enhance dynamic state estimation through a NARX neural network. The stretchable waveguide featuring a semidivided core design from previous work is sensitive to multiple strain modes. It is integrated into a soft finger actuator with two pressure chambers that replicates human finger motions. The soft finger, designed for applications in soft robotic grippers or hands, is viewed in isolation under pneumatic actuation controlled by motorized linear stages. The research first characterizes the soft finger's workspace and sensor response. Subsequently, three dynamic state estimators are developed using NARX architecture, differing in the degree of incorporating the optical waveguide sensor response. Evaluation on a testing path reveals that the full sensor response significantly improves end effector position estimation, reducing mean error by 51% from 5.70 mm to 2.80 mm, compared to only 21% improvement to 4.53 mm using the estimator representing a single core waveguide design. The letter concludes by discussing the application of these estimators for (open-loop) model-predictive control and recommends future focus on advanced, structured soft (optical) sensors for model-free state estimation and control of soft robots.
Read more6/7/2024

0
SeeThruFinger: See and Grasp Anything with a Multi-Modal Soft Touch
Fang Wan, Chaoyang Song
We present SeeThruFinger, a Vision-Based Tactile Sensing (VBTS) architecture using a markerless See-Thru-Network. It achieves simultaneous visual perception and tactile sensing while providing omni-directional, adaptive grasping for manipulation. Multi-modal perception of intrinsic and extrinsic interactions is critical in building intelligent robots that learn. Instead of adding various sensors for different modalities, a preferred solution is to integrate them into one elegant and coherent design, which is a challenging task. This study leverages the in-finger vision to inpaint occluded regions of the external environment, achieving coherent scene reconstruction for visual perception. By tracking real-time segmentation of the Soft Polyhedral Network's large-scale deformation, we achieved real-time markerless tactile sensing of 6D forces and torques. We further demonstrate the application of the SeeThruFinger for reactive grasping without using external cameras or dedicated force and torque sensors. As a result, our proposed SeeThruFinger architecture enables multi-modal perception via a single in-finger vision camera in a markerless way, including scene inpainting, object detection, segmentation tracking, and tactile sensing.
Read more9/4/2024
🤿
0
Learning to Detect Slip through Tactile Estimation of the Contact Force Field and its Entropy
Xiaohai Hu, Aparajit Venkatesh, Yusen Wan, Guiliang Zheng, Neel Jawale, Navneet Kaur, Xu Chen, Paul Birkmeyer
Detection of slip during object grasping and manipulation plays a vital role in object handling. Existing solutions primarily rely on visual information to devise a strategy for grasping. However, for robotic systems to attain a level of proficiency comparable to humans, especially in consistently handling and manipulating unfamiliar objects, integrating artificial tactile sensing is increasingly essential. We introduce a novel physics-informed, data-driven approach to detect slip continuously in real time. We employ the GelSight Mini, an optical tactile sensor, attached to custom-designed grippers to gather tactile data. Our work leverages the inhomogeneity of tactile sensor readings during slip events to develop distinctive features and formulates slip detection as a classification problem. To evaluate our approach, we test multiple data-driven models on 10 common objects under different loading conditions, textures, and materials. Our results show that the best classification algorithm achieves a high average accuracy of 95.61%. We further illustrate the practical application of our research in dynamic robotic manipulation tasks, where our real-time slip detection and prevention algorithm is implemented.
Read more4/30/2024