Enhanced Model-Free Dynamic State Estimation for a Soft Robot Finger Using an Embedded Optical Waveguide Sensor

0
Sign in to get full access
Overview
- This paper presents an enhanced model-free dynamic state estimation approach for a soft robot finger using an embedded optical waveguide sensor.
- The proposed method leverages the sensor's ability to capture detailed deformation data, enabling accurate estimation of the finger's shape and pose without relying on complex mechanical models.
- The research explores the integration of soft sensors and model-free techniques to enable more robust and adaptable control of soft robotic systems.
Plain English Explanation
This research focuses on improving the way we can track the shape and movement of a soft robot finger. Soft robots are designed to be flexible and adaptable, but this makes them challenging to control precisely. Traditionally, we've relied on complex mathematical models to predict how a soft robot will move, but these models can be inaccurate and difficult to create.
The researchers in this paper have come up with a new approach that doesn't require a detailed model of the robot. Instead, they use a special type of sensor embedded in the robot finger - an optical waveguide. This sensor can accurately measure how the finger is bending and deforming as it moves. By analyzing the data from this sensor, the researchers can estimate the finger's shape and position without needing to know all the details of how the robot is made and how it moves.
This model-free approach has several advantages. It's more adaptable, so the robot can handle unexpected changes or disturbances better. It's also simpler to implement, since you don't need to painstakingly develop an accurate mechanical model. Overall, this research represents an important step forward in making soft robots more practical and controllable, which could lead to new applications in areas like healthcare, search and rescue, and beyond.
Technical Explanation
The paper presents an enhanced model-free dynamic state estimation approach for a soft robot finger using an embedded optical waveguide sensor. The key innovations include:
- Optical Waveguide Sensing: The researchers integrated an optical waveguide sensor into the soft robot finger, allowing them to capture detailed deformation data as the finger moved and bent.
- Model-Free Estimation: Instead of relying on a complex mechanical model of the robot, the researchers developed a model-free approach to estimating the finger's shape and pose based on the sensor data.
- Dynamic State Estimation: The proposed method can track the finger's state in real-time, enabling more responsive and adaptive control compared to static modeling techniques.
The paper includes experiments demonstrating the performance of the model-free estimation approach on a soft robot finger prototype. The results show that the method can accurately track the finger's shape and position, even during dynamic motions, without requiring an extensive prior model of the robot's mechanics.
This work builds on previous research on state estimation for legged robots using gated recurrent neural networks and shape estimation for surgical continuum manipulators. The model-free, sensor-driven approach presented in this paper represents an important advancement in the control and estimation of soft robotic systems.
Critical Analysis
The paper provides a compelling demonstration of the benefits of model-free state estimation for soft robots. The use of an embedded optical waveguide sensor to capture detailed deformation data is a clever solution to the challenges of tracking the complex dynamics of a soft robot finger.
However, the paper does not fully address the potential limitations and caveats of this approach. For example, the experiments were conducted on a relatively simple, single-finger prototype, and it's unclear how the method would scale to more complex soft robotic systems with multiple interconnected parts. Additionally, the paper does not discuss the sensitivity of the approach to sensor noise, calibration errors, or other real-world factors that could impact its performance in practical applications.
Further research is needed to explore the robustness and generalizability of this model-free estimation technique, as well as to investigate its integration with other soft robotics technologies, such as fiber Bragg grating-based stiffness estimation. Nonetheless, this work represents an important step forward in enabling more adaptive and capable soft robotic systems.
Conclusion
This paper presents an enhanced model-free dynamic state estimation approach for a soft robot finger using an embedded optical waveguide sensor. By leveraging the detailed deformation data provided by the sensor, the researchers were able to develop a method for accurately tracking the finger's shape and pose without relying on a complex mechanical model.
The model-free, sensor-driven approach demonstrated in this paper could have significant implications for the design and control of soft robotic systems. By reducing the need for extensive prior modeling, this technique could enable more adaptable and responsive soft robots, opening up new possibilities in areas like healthcare, search and rescue, and beyond.
While further research is needed to fully address the limitations and scalability of this approach, this work represents an important step forward in the field of soft robotics, highlighting the potential of integrating advanced sensing capabilities with model-free estimation techniques.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Enhanced Model-Free Dynamic State Estimation for a Soft Robot Finger Using an Embedded Optical Waveguide Sensor
Henrik Krauss, Kenjiro Takemura
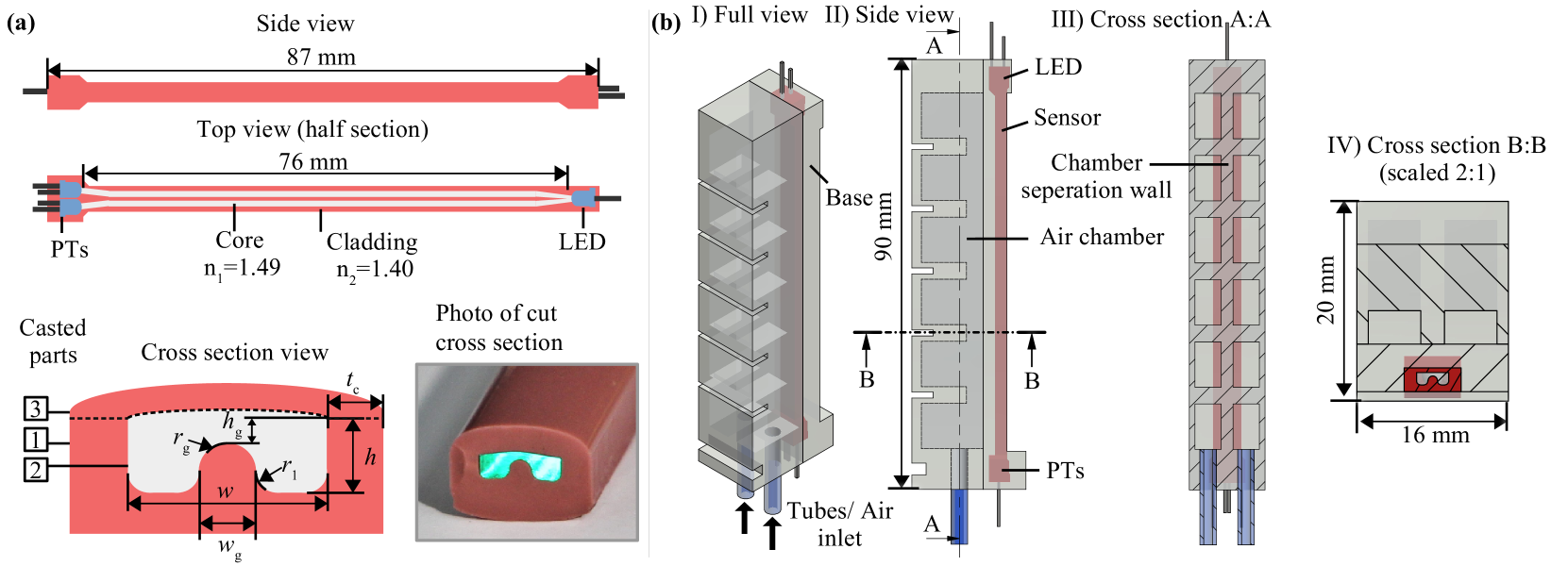
In this letter, an advanced stretchable optical waveguide sensor is implemented into a multidirectional PneuNet soft actuator to enhance dynamic state estimation through a NARX neural network. The stretchable waveguide featuring a semidivided core design from previous work is sensitive to multiple strain modes. It is integrated into a soft finger actuator with two pressure chambers that replicates human finger motions. The soft finger, designed for applications in soft robotic grippers or hands, is viewed in isolation under pneumatic actuation controlled by motorized linear stages. The research first characterizes the soft finger's workspace and sensor response. Subsequently, three dynamic state estimators are developed using NARX architecture, differing in the degree of incorporating the optical waveguide sensor response. Evaluation on a testing path reveals that the full sensor response significantly improves end effector position estimation, reducing mean error by 51% from 5.70 mm to 2.80 mm, compared to only 21% improvement to 4.53 mm using the estimator representing a single core waveguide design. The letter concludes by discussing the application of these estimators for (open-loop) model-predictive control and recommends future focus on advanced, structured soft (optical) sensors for model-free state estimation and control of soft robots.
Read more6/7/2024

0
Proprioceptive State Estimation for Amphibious Tactile Sensing
Ning Guo, Xudong Han, Shuqiao Zhong, Zhiyuan Zhou, Jian Lin, Jian S. Dai, Fang Wan, Chaoyang Song
This paper presents a novel vision-based proprioception approach for a soft robotic finger that can estimate and reconstruct tactile interactions in both terrestrial and aquatic environments. The key to this system lies in the finger's unique metamaterial structure, which facilitates omni-directional passive adaptation during grasping, protecting delicate objects across diverse scenarios. A compact in-finger camera captures high-framerate images of the finger's deformation during contact, extracting crucial tactile data in real-time. We present a volumetric discretized model of the soft finger and use the geometry constraints captured by the camera to find the optimal estimation of the deformed shape. The approach is benchmarked using a motion capture system with sparse markers and a haptic device with dense measurements. Both results show state-of-the-art accuracies, with a median error of 1.96 mm for overall body deformation, corresponding to 2.1% of the finger's length. More importantly, the state estimation is robust in both on-land and underwater environments as we demonstrate its usage for underwater object shape sensing. This combination of passive adaptation and real-time tactile sensing paves the way for amphibious robotic grasping applications.
Read more7/23/2024

0
Simultaneous Estimation of Shape and Force along Highly Deformable Surgical Manipulators Using Sparse FBG Measurement
Yiang Lu, Bin Li, Wei Chen, Junyan Yan, Shing Shin Cheng, Jiangliu Wang, Jianshu Zhou, Qi Dou, Yun-hui Liu
Recently, fiber optic sensors such as fiber Bragg gratings (FBGs) have been widely investigated for shape reconstruction and force estimation of flexible surgical robots. However, most existing approaches need precise model parameters of FBGs inside the fiber and their alignments with the flexible robots for accurate sensing results. Another challenge lies in online acquiring external forces at arbitrary locations along the flexible robots, which is highly required when with large deflections in robotic surgery. In this paper, we propose a novel data-driven paradigm for simultaneous estimation of shape and force along highly deformable flexible robots by using sparse strain measurement from a single-core FBG fiber. A thin-walled soft sensing tube helically embedded with FBG sensors is designed for a robotic-assisted flexible ureteroscope with large deflection up to 270 degrees and a bend radius under 10 mm. We introduce and study three learning models by incorporating spatial strain encoders, and compare their performances in both free space and constrained environments with contact forces at different locations. The experimental results in terms of dynamic shape-force sensing accuracy demonstrate the effectiveness and superiority of the proposed methods.
Read more4/29/2024

0
OptiState: State Estimation of Legged Robots using Gated Networks with Transformer-based Vision and Kalman Filtering
Alexander Schperberg, Yusuke Tanaka, Saviz Mowlavi, Feng Xu, Bharathan Balaji, Dennis Hong
State estimation for legged robots is challenging due to their highly dynamic motion and limitations imposed by sensor accuracy. By integrating Kalman filtering, optimization, and learning-based modalities, we propose a hybrid solution that combines proprioception and exteroceptive information for estimating the state of the robot's trunk. Leveraging joint encoder and IMU measurements, our Kalman filter is enhanced through a single-rigid body model that incorporates ground reaction force control outputs from convex Model Predictive Control optimization. The estimation is further refined through Gated Recurrent Units, which also considers semantic insights and robot height from a Vision Transformer autoencoder applied on depth images. This framework not only furnishes accurate robot state estimates, including uncertainty evaluations, but can minimize the nonlinear errors that arise from sensor measurements and model simplifications through learning. The proposed methodology is evaluated in hardware using a quadruped robot on various terrains, yielding a 65% improvement on the Root Mean Squared Error compared to our VIO SLAM baseline. Code example: https://github.com/AlexS28/OptiState
Read more4/30/2024