QUADFormer: Learning-based Detection of Cyber Attacks in Quadrotor UAVs

0

Sign in to get full access
Overview
- This paper presents a deep learning-based approach called QUADFormer for detecting cyber attacks on quadrotor unmanned aerial vehicles (UAVs).
- Quadrotor UAVs are vulnerable to various cyber attacks, which can disrupt their operations and pose safety risks.
- The proposed QUADFormer model combines a Transformer-based architecture with a recurrent neural network to effectively detect and identify different types of cyber attacks on quadrotor UAVs.
Plain English Explanation
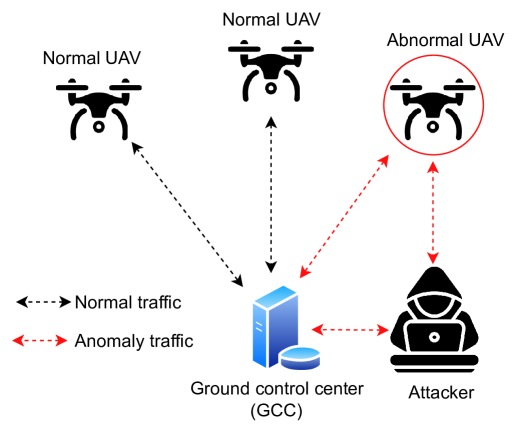
The paper focuses on developing a system to detect cyber attacks on quadrotor drones. Quadrotor drones are a type of unmanned aerial vehicle (UAV) that are becoming increasingly popular for various applications, such as surveillance, delivery, and recreational use. However, these drones are also vulnerable to cyber attacks, where hackers can take control of the drone or disrupt its operations, potentially causing harm or safety issues.
To address this problem, the researchers have developed a deep learning-based system called QUADFormer. This system uses a combination of Transformer-based architecture and recurrent neural networks to analyze the sensor data and other information from the drone and detect if a cyber attack is occurring. The Transformer-based architecture is particularly well-suited for this task as it can effectively capture the complex patterns and relationships in the data, while the recurrent neural network helps to track the temporal dynamics of the drone's behavior over time.
By using this advanced machine learning approach, the researchers aim to provide a reliable and accurate way to detect and prevent cyber attacks on quadrotor drones, ultimately improving the safety and security of these increasingly important technologies.
Technical Explanation
The paper presents a deep learning-based approach called QUADFormer: Learning-based Detection of Cyber Attacks in Quadrotor UAVs for detecting cyber attacks on quadrotor unmanned aerial vehicles (UAVs).
The researchers highlight the growing threat of cyber attacks on quadrotor UAVs, which can disrupt their operations and pose safety risks. To address this challenge, they propose the QUADFormer model, which combines a Transformer-based architecture with a recurrent neural network (RNN) to effectively detect and identify different types of cyber attacks.
The key components of the QUADFormer model include:
-
Transformer-based Encoder: The model uses a Transformer-based encoder to capture the complex patterns and relationships in the sensor data and other information from the quadrotor UAV. The Transformer architecture is well-suited for this task as it can efficiently model the dependencies and interactions between various inputs.
-
Recurrent Neural Network: The model incorporates an RNN to track the temporal dynamics of the quadrotor UAV's behavior over time. This allows the system to detect changes and anomalies that may indicate a cyber attack is in progress.
-
Attack Classification: The output of the QUADFormer model is a classification of the type of cyber attack being detected, enabling the system to provide specific information about the threat and guide the appropriate response.
The researchers evaluate the performance of the QUADFormer model on a dataset of simulated cyber attacks on quadrotor UAVs. Their results demonstrate the effectiveness of the proposed approach in accurately detecting and identifying various types of cyber attacks, outperforming other state-of-the-art methods.
Critical Analysis
The paper presents a promising approach to address the critical issue of cyber attacks on quadrotor UAVs, which are becoming increasingly prevalent as these technologies are more widely adopted. The use of a Transformer-based architecture and a recurrent neural network is a well-designed and theoretically sound approach to capturing the complex patterns and temporal dynamics in the data.
However, the paper does not provide a detailed discussion of the limitations and potential challenges of the proposed QUADFormer model. For example, the researchers do not address the potential for the model to be fooled by adversarial attacks, where the attacker could intentionally modify the input data to evade detection. Additionally, the paper does not explore the computational and resource requirements of the model, which could be a practical concern for real-world deployment on resource-constrained UAV platforms.
Furthermore, the paper could have provided a more comprehensive evaluation of the model's performance, including comparisons to a broader range of baseline methods and an analysis of the model's robustness to different types of cyber attacks and operational conditions.
Overall, the QUADFormer approach is a valuable contribution to the field of cyber-physical security for UAVs, but further research is needed to address the potential limitations and strengthen the practical applicability of the solution.
Conclusion
The paper presents a deep learning-based approach called QUADFormer for detecting cyber attacks on quadrotor unmanned aerial vehicles (UAVs). The proposed model combines a Transformer-based architecture with a recurrent neural network to effectively capture the complex patterns and temporal dynamics in the sensor data and other information from the quadrotor UAV.
The researchers demonstrate the effectiveness of the QUADFormer model in accurately detecting and identifying various types of cyber attacks on quadrotor UAVs, which is a critical security concern as these technologies become more widely adopted. The use of advanced machine learning techniques, such as Transformers and recurrent neural networks, is a promising approach to address this challenge and improve the safety and security of quadrotor UAV operations.
While the paper provides a solid technical foundation, further research is needed to address the potential limitations and practical considerations for real-world deployment of the QUADFormer system. Nonetheless, this work represents an important step forward in the development of robust and reliable cyber attack detection solutions for the growing field of quadrotor UAV applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
QUADFormer: Learning-based Detection of Cyber Attacks in Quadrotor UAVs
Pengyu Wang, Zhaohua Yang, Nachuan Yang, Zikai Wang, Jialu Li, Fan Zhang, Chaoqun Wang, Jiankun Wang, Max Q. -H. Meng, Ling Shi
Safety-critical intelligent cyber-physical systems, such as quadrotor unmanned aerial vehicles (UAVs), are vulnerable to different types of cyber attacks, and the absence of timely and accurate attack detection can lead to severe consequences. When UAVs are engaged in large outdoor maneuvering flights, their system constitutes highly nonlinear dynamics that include non-Gaussian noises. Therefore, the commonly employed traditional statistics-based and emerging learning-based attack detection methods do not yield satisfactory results. In response to the above challenges, we propose QUADFormer, a novel Quadrotor UAV Attack Detection framework with transFormer-based architecture. This framework includes a residue generator designed to generate a residue sequence sensitive to anomalies. Subsequently, this sequence is fed into a transformer structure with disparity in correlation to specifically learn its statistical characteristics for the purpose of classification and attack detection. Finally, we design an alert module to ensure the safe execution of tasks by UAVs under attack conditions. We conduct extensive simulations and real-world experiments, and the results show that our method has achieved superior detection performance compared with many state-of-the-art methods.
Read more6/17/2024
0
Enhanced Intrusion Detection System for Multiclass Classification in UAV Networks
Safaa Menssouri, Mamady Delamou, Khalil Ibrahimi, El Mehdi Amhoud
Unmanned Aerial Vehicles (UAVs) have become increasingly popular in various applications, especially with the emergence of 6G systems and networks. However, their widespread adoption has also led to concerns regarding security vulnerabilities, making the development of reliable intrusion detection systems (IDS) essential for ensuring UAVs safety and mission success. This paper presents a new IDS for UAV networks. A binary-tuple representation was used for encoding class labels, along with a deep learning-based approach employed for classification. The proposed system enhances the intrusion detection by capturing complex class relationships and temporal network patterns. Moreover, a cross-correlation study between common features of different UAVs was conducted to discard correlated features that might mislead the classification of the proposed IDS. The full study was carried out using the UAV-IDS-2020 dataset, and we assessed the performance of the proposed IDS using different evaluation metrics. The experimental results highlighted the effectiveness of the proposed multiclass classifier model with an accuracy of 95%.
Read more6/18/2024
🧪
0
A Multimodal Learning-based Approach for Autonomous Landing of UAV
Francisco Neves, Lu'is Branco, Maria Pereira, Rafael Claro, Andry Pinto
In the field of autonomous Unmanned Aerial Vehicles (UAVs) landing, conventional approaches fall short in delivering not only the required precision but also the resilience against environmental disturbances. Yet, learning-based algorithms can offer promising solutions by leveraging their ability to learn the intelligent behaviour from data. On one hand, this paper introduces a novel multimodal transformer-based Deep Learning detector, that can provide reliable positioning for precise autonomous landing. It surpasses standard approaches by addressing individual sensor limitations, achieving high reliability even in diverse weather and sensor failure conditions. It was rigorously validated across varying environments, achieving optimal true positive rates and average precisions of up to 90%. On the other hand, it is proposed a Reinforcement Learning (RL) decision-making model, based on a Deep Q-Network (DQN) rationale. Initially trained in sumlation, its adaptive behaviour is successfully transferred and validated in a real outdoor scenario. Furthermore, this approach demonstrates rapid inference times of approximately 5ms, validating its applicability on edge devices.
Read more5/22/2024
🏋️
0
New!DroneDiffusion: Robust Quadrotor Dynamics Learning with Diffusion Models
Avirup Das, Rishabh Dev Yadav, Sihao Sun, Mingfei Sun, Samuel Kaski, Wei Pan
An inherent fragility of quadrotor systems stems from model inaccuracies and external disturbances. These factors hinder performance and compromise the stability of the system, making precise control challenging. Existing model-based approaches either make deterministic assumptions, utilize Gaussian-based representations of uncertainty, or rely on nominal models, all of which often fall short in capturing the complex, multimodal nature of real-world dynamics. This work introduces DroneDiffusion, a novel framework that leverages conditional diffusion models to learn quadrotor dynamics, formulated as a sequence generation task. DroneDiffusion achieves superior generalization to unseen, complex scenarios by capturing the temporal nature of uncertainties and mitigating error propagation. We integrate the learned dynamics with an adaptive controller for trajectory tracking with stability guarantees. Extensive experiments in both simulation and real-world flights demonstrate the robustness of the framework across a range of scenarios, including unfamiliar flight paths and varying payloads, velocities, and wind disturbances.
Read more9/18/2024