DroneDiffusion: Robust Quadrotor Dynamics Learning with Diffusion Models

0
🏋️
Sign in to get full access
Overview
- Quadrotor systems are inherently fragile due to model inaccuracies and external disturbances, which compromise their stability and make precise control challenging.
- Existing model-based approaches often fail to capture the complex, multimodal nature of real-world quadrotor dynamics.
- This work introduces DroneDiffusion, a novel framework that uses conditional diffusion models to learn quadrotor dynamics as a sequence generation task.
- DroneDiffusion achieves superior generalization to unseen, complex scenarios by capturing the temporal nature of uncertainties and mitigating error propagation.
- The learned dynamics are integrated with an adaptive controller for robust trajectory tracking with stability guarantees.
Plain English Explanation
Quadrotor Dynamics: Quadrotors, or small drones with four rotors, are tricky to control precisely. This is because the mathematical models used to describe their behavior don't always match reality. External factors like wind and changes in the drone's weight can also throw off the control system.
Existing Approaches: Previous methods for controlling quadrotors either make simplifying assumptions, use probability distributions that don't fully capture the complexities of real-world dynamics, or rely on basic models that fall short in challenging scenarios.
DroneDiffusion: The researchers developed a new framework called DroneDiffusion that takes a different approach. It uses a type of machine learning called a "diffusion model" to learn the complex, time-varying dynamics of quadrotors. This allows it to better handle uncertainties and disturbances that trip up other control systems.
Key Benefits: DroneDiffusion can adapt to unfamiliar flight paths, changing payloads, high speeds, and wind gusts much more effectively than previous methods. By capturing the temporal nature of these uncertainties, it is able to make more robust predictions and maintain stable control.
Practical Applications: The researchers integrated DroneDiffusion with an adaptive controller and tested it extensively in simulation and real-world flights. The results demonstrate the framework's ability to enable quadrotors to navigate a wide range of challenging scenarios with improved reliability and performance.
Technical Explanation
The core innovation in this work is the use of conditional diffusion models to learn quadrotor dynamics. Diffusion models are a type of generative AI that can capture complex, multimodal distributions by learning to reverse a noising process.
The researchers formulate quadrotor dynamics as a sequence generation task, where the diffusion model is conditioned on the current state and control inputs to predict the next state. This allows the model to learn the temporal evolution of the system, including uncertainties that arise from model inaccuracies and external disturbances.
To integrate the learned dynamics with control, the authors develop an adaptive controller that can track desired trajectories while guaranteeing stability. Extensive experiments in simulation and real-world flights demonstrate the robustness of the DroneDiffusion framework across a range of challenging scenarios, including unfamiliar flight paths, varying payloads, high velocities, and wind disturbances.
Critical Analysis
The authors acknowledge that while DroneDiffusion demonstrates impressive generalization capabilities, there are still some limitations to consider. For instance, the framework relies on access to accurate state information, which may not always be available in real-world deployments. Additionally, the computational cost of the diffusion model inference may limit its applicability for resource-constrained platforms.
Further research could explore ways to reduce the computational burden, potentially through techniques like accelerated diffusion models. Integrating DroneDiffusion with state estimation methods could also broaden its practical applicability. Overall, this work represents a significant advance in learning-based quadrotor control and highlights the potential of diffusion models for capturing complex, time-varying dynamics.
Conclusion
The DroneDiffusion framework introduced in this paper offers a novel approach to learning quadrotor dynamics that can better handle the inherent fragility and uncertainties of these systems. By leveraging conditional diffusion models, the researchers demonstrate superior generalization to a wide range of challenging scenarios, including unfamiliar flight paths, varying payloads, and wind disturbances.
The integration of the learned dynamics with an adaptive controller enables robust trajectory tracking with stability guarantees, showcasing the practical applicability of this work. While there are still some limitations to address, DroneDiffusion represents an important step forward in enhancing the reliability and performance of quadrotor systems, with potential implications for a variety of real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏋️
0
New!DroneDiffusion: Robust Quadrotor Dynamics Learning with Diffusion Models
Avirup Das, Rishabh Dev Yadav, Sihao Sun, Mingfei Sun, Samuel Kaski, Wei Pan
An inherent fragility of quadrotor systems stems from model inaccuracies and external disturbances. These factors hinder performance and compromise the stability of the system, making precise control challenging. Existing model-based approaches either make deterministic assumptions, utilize Gaussian-based representations of uncertainty, or rely on nominal models, all of which often fall short in capturing the complex, multimodal nature of real-world dynamics. This work introduces DroneDiffusion, a novel framework that leverages conditional diffusion models to learn quadrotor dynamics, formulated as a sequence generation task. DroneDiffusion achieves superior generalization to unseen, complex scenarios by capturing the temporal nature of uncertainties and mitigating error propagation. We integrate the learned dynamics with an adaptive controller for trajectory tracking with stability guarantees. Extensive experiments in both simulation and real-world flights demonstrate the robustness of the framework across a range of scenarios, including unfamiliar flight paths and varying payloads, velocities, and wind disturbances.
Read more9/18/2024

0
Learning Long-Horizon Predictions for Quadrotor Dynamics
Pratyaksh Prabhav Rao, Alessandro Saviolo, Tommaso Castiglione Ferrari, Giuseppe Loianno
Accurate modeling of system dynamics is crucial for achieving high-performance planning and control of robotic systems. Although existing data-driven approaches represent a promising approach for modeling dynamics, their accuracy is limited to a short prediction horizon, overlooking the impact of compounding prediction errors over longer prediction horizons. Strategies to mitigate these cumulative errors remain underexplored. To bridge this gap, in this paper, we study the key design choices for efficiently learning long-horizon prediction dynamics for quadrotors. Specifically, we analyze the impact of multiple architectures, historical data, and multi-step loss formulation. We show that sequential modeling techniques showcase their advantage in minimizing compounding errors compared to other types of solutions. Furthermore, we propose a novel decoupled dynamics learning approach, which further simplifies the learning process while also enhancing the approach modularity. Extensive experiments and ablation studies on real-world quadrotor data demonstrate the versatility and precision of the proposed approach. Our outcomes offer several insights and methodologies for enhancing long-term predictive accuracy of learned quadrotor dynamics for planning and control.
Read more7/19/2024
✨
0
New!A Learning-based Quadcopter Controller with Extreme Adaptation
Dingqi Zhang, Antonio Loquercio, Jerry Tang, Ting-Hao Wang, Jitendra Malik, Mark W. Mueller
This paper introduces a learning-based low-level controller for quadcopters, which adaptively controls quadcopters with significant variations in mass, size, and actuator capabilities. Our approach leverages a combination of imitation learning and reinforcement learning, creating a fast-adapting and general control framework for quadcopters that eliminates the need for precise model estimation or manual tuning. The controller estimates a latent representation of the vehicle's system parameters from sensor-action history, enabling it to adapt swiftly to diverse dynamics. Extensive evaluations in simulation demonstrate the controller's ability to generalize to unseen quadcopter parameters, with an adaptation range up to 16 times broader than the training set. In real-world tests, the controller is successfully deployed on quadcopters with mass differences of 3.7 times and propeller constants varying by more than 100 times, while also showing rapid adaptation to disturbances such as off-center payloads and motor failures. These results highlight the potential of our controller in extreme adaptation to simplify the design process and enhance the reliability of autonomous drone operations in unpredictable environments. The video and code are at: https://github.com/muellerlab/xadapt_ctrl
Read more9/20/2024
0
Deep Reinforcement Learning-based Quadcopter Controller: A Practical Approach and Experiments
Truong-Dong Do, Nguyen Xuan Mung, Sung Kyung Hong
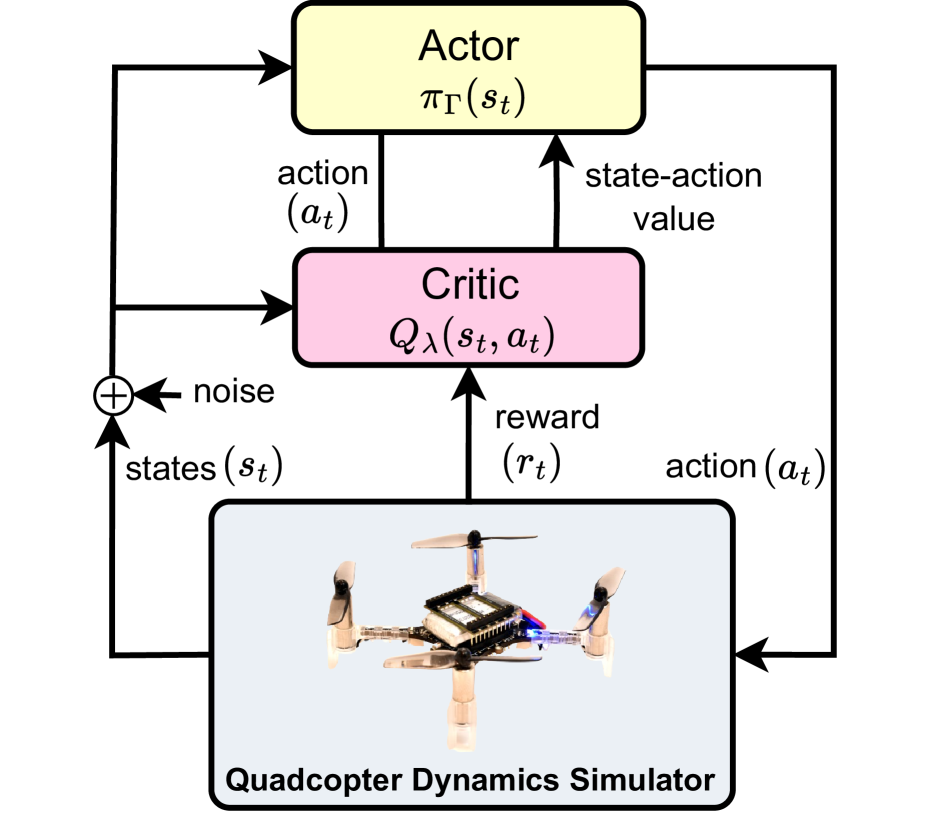
Quadcopters have been studied for decades thanks to their maneuverability and capability of operating in a variety of circumstances. However, quadcopters suffer from dynamical nonlinearity, actuator saturation, as well as sensor noise that make it challenging and time consuming to obtain accurate dynamic models and achieve satisfactory control performance. Fortunately, deep reinforcement learning came and has shown significant potential in system modelling and control of autonomous multirotor aerial vehicles, with recent advancements in deployment, performance enhancement, and generalization. In this paper, an end-to-end deep reinforcement learning-based controller for quadcopters is proposed that is secure for real-world implementation, data-efficient, and free of human gain adjustments. First, a novel actor-critic-based architecture is designed to map the robot states directly to the motor outputs. Then, a quadcopter dynamics-based simulator was devised to facilitate the training of the controller policy. Finally, the trained policy is deployed on a real Crazyflie nano quadrotor platform, without any additional fine-tuning process. Experimental results show that the quadcopter exhibits satisfactory performance as it tracks a given complicated trajectory, which demonstrates the effectiveness and feasibility of the proposed method and signifies its capability in filling the simulation-to-reality gap.
Read more6/19/2024