Quaternion-based Adaptive Backstepping Fast Terminal Sliding Mode Control for Quadrotor UAVs with Finite Time Convergence
2407.01275
0
0

Abstract
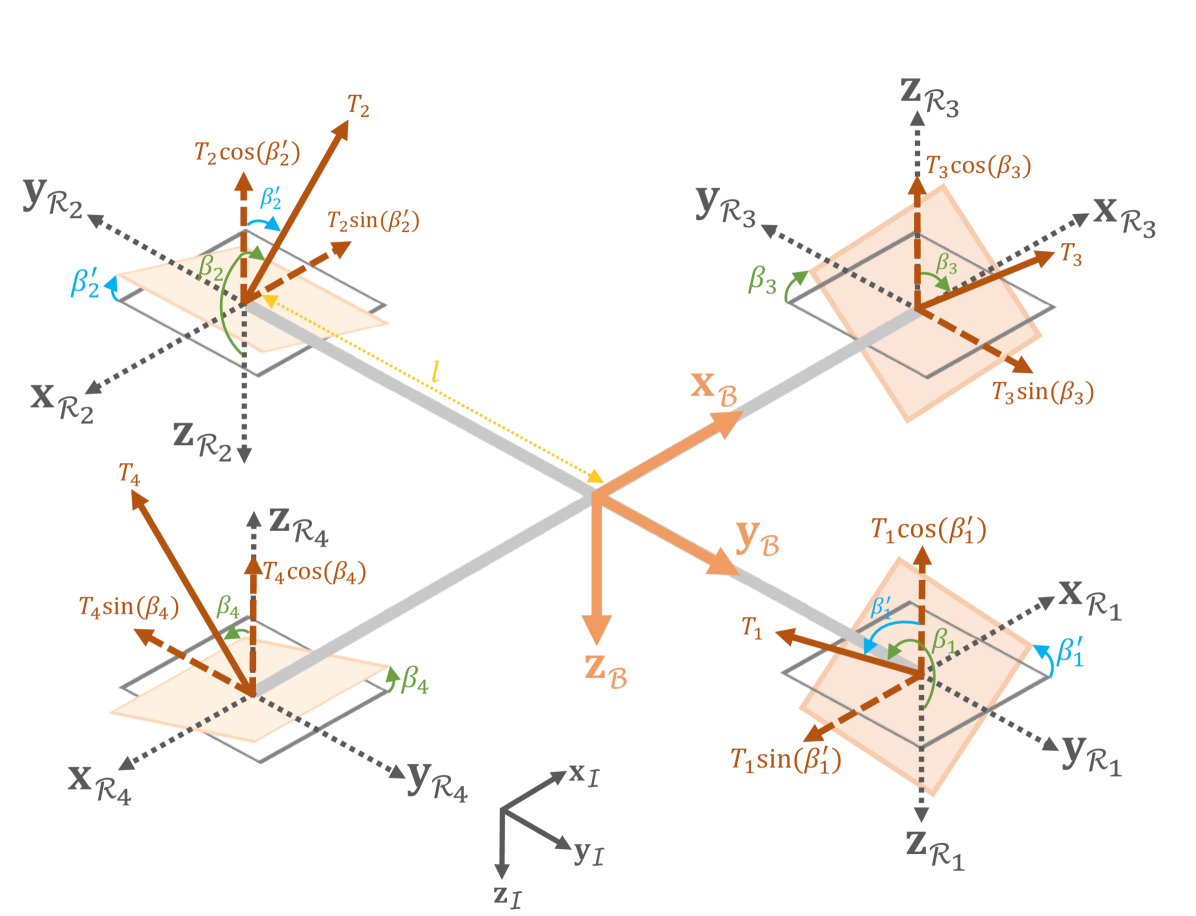
This paper proposes a novel quaternion-based approach for tracking the translation (position and linear velocity) and rotation (attitude and angular velocity) trajectories of underactuated Unmanned Aerial Vehicles (UAVs). Quadrotor UAVs are challenging regarding accuracy, singularity, and uncertainties issues. Controllers designed based on unit-quaternion are singularity-free for attitude representation compared to other methods (e.g., Euler angles), which fail to represent the vehicle's attitude at multiple orientations. Quaternion-based Adaptive Backstepping Control (ABC) and Adaptive Fast Terminal Sliding Mode Control (AFTSMC) are proposed to address a set of challenging problems. A quaternion-based ABC, a superior recursive approach, is proposed to generate the necessary thrust handling unknown uncertainties and UAV translation trajectory tracking. Next, a quaternion-based AFTSMC is developed to overcome parametric uncertainties, avoid singularity, and ensure fast convergence in a finite time. Moreover, the proposed AFTSMC is able to significantly minimize control signal chattering, which is the main reason for actuator failure and provide smooth and accurate rotational control input. To ensure the robustness of the proposed approach, the designed control algorithms have been validated considering unknown time-variant parametric uncertainties and significant initialization errors. The proposed techniques has been compared to state-of-the-art control technique. Keywords: Adaptive Backstepping Control (ABC), Adaptive Fast Terminal Sliding Mode Control (AFTSMC), Unit-quaternion, Unmanned Aerial Vehicles, Singularity Free, Pose Control
Create account to get full access
Overview
- This paper proposes a Quaternion-based Adaptive Backstepping Fast Terminal Sliding Mode Control (QABFTSMC) system for the control of quadrotor Unmanned Aerial Vehicles (UAVs).
- The control system is designed to provide finite-time convergence of the quadrotor's position and attitude to the desired values, even in the presence of parameter uncertainties and external disturbances.
- The control law is developed using a combination of Adaptive Backstepping Control (ABC), Adaptive Fast Terminal Sliding Mode Control (AFTSMC), and quaternion-based pose representation.
Plain English Explanation
The paper presents a new control system for quadrotor drones that aims to make them more stable and responsive, even when facing challenges like changing conditions or unexpected disturbances. The key ideas are:
-
Quaternions: The control system uses quaternions, which are a mathematical way to represent the drone's orientation (how it is tilted or rotated) in a way that avoids the problems that can arise with other representations.
-
Adaptive Backstepping: This is a control technique that breaks down the control problem into smaller, easier-to-solve steps, and adjusts the controller parameters automatically to handle uncertainties in the drone's behavior or the environment.
-
Fast Terminal Sliding Mode Control: This is another control technique that drives the drone's position and orientation to the desired values rapidly and robustly, even in the presence of disturbances.
By combining these three elements - quaternions, adaptive backstepping, and fast terminal sliding mode control - the researchers developed a control system that can make quadrotor drones fly more precisely and recover quickly from disruptions, without getting stuck in problematic situations.
Technical Explanation
The paper proposes a Quaternion-based Adaptive Backstepping Fast Terminal Sliding Mode Control (QABFTSMC) system for the control of quadrotor Unmanned Aerial Vehicles (UAVs). The control system is designed to provide finite-time convergence of the quadrotor's position and attitude to the desired values, even in the presence of parameter uncertainties and external disturbances.
The control law is developed using a combination of Adaptive Backstepping Control (ABC), Adaptive Fast Terminal Sliding Mode Control (AFTSMC), and quaternion-based pose representation. The ABC technique is used to break down the control problem into smaller, easier-to-solve steps, while the AFTSMC component ensures fast and robust convergence of the drone's position and attitude to the desired values. The use of quaternions to represent the drone's orientation helps to avoid the singularities and discontinuities that can arise with other attitude representations, such as Euler angles.
The performance of the proposed QABFTSMC system is evaluated through numerical simulations and compared to other control approaches, such as Integral Sliding Mode Control (ISMC) and Nonlinear Model Predictive Control (NMPC). The results show that the QABFTSMC system outperforms these other methods in terms of tracking accuracy, convergence time, and robustness to parameter uncertainties and external disturbances.
Critical Analysis
The paper provides a comprehensive and detailed development of the QABFTSMC control system for quadrotor UAVs. The authors have carefully addressed the challenges of achieving precise control and fast convergence in the presence of uncertainties and disturbances, which are crucial for the practical application of quadrotor drones.
One potential limitation of the proposed approach is that the control law requires the measurement or estimation of the full state of the quadrotor, including position, velocity, and attitude. In some practical scenarios, not all of these variables may be directly available, which could complicate the implementation of the control system.
Additionally, the paper focuses on the theoretical development and numerical simulations of the QABFTSMC system. Further experimental validation on actual quadrotor platforms would be valuable to assess the real-world performance and robustness of the control system under various operating conditions.
Overall, the research presented in this paper represents a significant contribution to the field of quadrotor control and provides a promising solution for achieving high-performance and reliable flight control for these increasingly important aerial vehicles.
Conclusion
The paper introduces a Quaternion-based Adaptive Backstepping Fast Terminal Sliding Mode Control (QABFTSMC) system for the control of quadrotor Unmanned Aerial Vehicles (UAVs). The proposed control system combines the advantages of Adaptive Backstepping Control, Adaptive Fast Terminal Sliding Mode Control, and quaternion-based pose representation to achieve finite-time convergence of the quadrotor's position and attitude, even in the presence of parameter uncertainties and external disturbances.
The QABFTSMC system has been shown to outperform other control approaches, such as Integral Sliding Mode Control and Nonlinear Model Predictive Control, in terms of tracking accuracy, convergence time, and robustness. This research represents an important step forward in the development of advanced control systems for quadrotor drones, which have a wide range of applications in areas such as aerial photography, search and rescue, and infrastructure inspection.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Nonlinear Model Predictive Control of Tiltrotor Quadrotors with Feasible Control Allocation
Zeinab Shayan, Jann Cristobal, Mohammadreza Izadi, Amin Yazdanshenas, Mehdi Naderi, Reza Faieghi
0
0
This paper presents a new flight control framework for tilt-rotor multirotor uncrewed aerial vehicles (MRUAVs). Tiltrotor designs offer full actuation but introduce complexity in control allocation due to actuator redundancy. We propose a new approach where the allocator is tightly coupled with the controller, ensuring that the control signals generated by the controller are feasible within the vehicle actuation space. We leverage nonlinear model predictive control (NMPC) to implement the above framework, providing feasible control signals and optimizing performance. This unified control structure simultaneously manages both position and attitude, which eliminates the need for cascaded position and attitude control loops. Extensive numerical experiments demonstrate that our approach significantly outperforms conventional techniques that are based on linear quadratic regulator (LQR) and sliding mode control (SMC), especially in high-acceleration trajectories and disturbance rejection scenarios, making the proposed approach a viable option for enhanced control precision and robustness, particularly in challenging missions.
6/26/2024
Servo Integrated Nonlinear Model Predictive Control for Overactuated Tiltable-Quadrotors
Jinjie Li, Junichiro Sugihara, Moju Zhao
0
0
Quadrotors are widely employed across various domains, yet the conventional type faces limitations due to underactuation, where attitude control is closely tied to positional adjustments. In contrast, quadrotors equipped with tiltable rotors offer overactuation, empowering them to track both position and attitude trajectories. However, the nonlinear dynamics of the drone body and the sluggish response of tilting servos pose challenges for conventional cascade controllers. In this study, we propose a control methodology for tilting-rotor quadrotors based on nonlinear model predictive control (NMPC). Unlike conventional approaches, our method preserves the full dynamics without simplification and utilizes actuator commands directly as control inputs. Notably, we incorporate a first-order servo model within the NMPC framework. Through simulation, we observe that integrating the servo dynamics not only enhances control performance but also accelerates convergence. To assess the efficacy of our approach, we fabricate a tiltable-quadrotor and deploy the algorithm onboard at a frequency of 100Hz. Extensive real-world experiments demonstrate rapid, robust, and smooth pose tracking performance.
5/17/2024
📉
Adaptive Integral Sliding Mode Control for Attitude Tracking of Underwater Robots With Large Range Pitch Variations in Confined Space
Xiaorui Wang, Zeyu Sha, Feitian Zhang
0
0
Underwater robots play a crucial role in exploring aquatic environments. The ability to flexibly adjust their attitudes is essential for underwater robots to effectively accomplish tasks in confined space. However, the highly coupled six degrees of freedom dynamics resulting from attitude changes and the complex turbulence within limited spatial areas present significant challenges. To address the problem of attitude control of underwater robots, this letter investigates large-range pitch angle tracking during station holding as well as simultaneous roll and yaw angle control to enable versatile attitude adjustments. Based on dynamic modeling, this letter proposes an adaptive integral sliding mode controller (AISMC) that integrates an integral module into traditional sliding mode control (SMC) and adaptively adjusts the switching gain for improved tracking accuracy, reduced chattering, and enhanced robustness. The stability of the closed-loop control system is established through Lyapunov analysis. Extensive experiments and comparison studies are conducted using a commercial remotely operated vehicle (ROV), the results of which demonstrate that AISMC achieves satisfactory performance in attitude tracking control in confined space with unknown disturbances, significantly outperforming both PID and SMC.
5/2/2024

Control of Unknown Quadrotors from a Single Throw
Till M. Blaha, Ewoud J. J. Smeur, Bart D. W. Remes
0
0
This paper presents a method to recover quadrotor UAV from a throw, when no control parameters are known before the throw. We leverage the availability of high-frequency rotor speed feedback available in racing drone hardware and software to find control effectiveness values and fit a motor model using recursive least squares (RLS) estimation. Furthermore, we propose an excitation sequence that provides large actuation commands while guaranteeing to stay within gyroscope sensing limits. After 450ms of excitation, an INDI attitude controller uses the 52 fitted parameters to arrest rotational motion and recover an upright attitude. Finally, a NDI position controller drives the craft to a position setpoint. The proposed algorithm runs efficiently on microcontrollers found in common UAV flight controllers, and was shown to recover an agile quadrotor every time in 57 live experiments with as low as 3.5m throw height, demonstrating robustness against initial rotations and noise. We also demonstrate control of randomized quadrotors in simulated throws, where the parameter fitting RMS error is typically within 10% of the true value.
6/21/2024