Servo Integrated Nonlinear Model Predictive Control for Overactuated Tiltable-Quadrotors
2405.09871
0
0
Abstract
Quadrotors are widely employed across various domains, yet the conventional type faces limitations due to underactuation, where attitude control is closely tied to positional adjustments. In contrast, quadrotors equipped with tiltable rotors offer overactuation, empowering them to track both position and attitude trajectories. However, the nonlinear dynamics of the drone body and the sluggish response of tilting servos pose challenges for conventional cascade controllers. In this study, we propose a control methodology for tilting-rotor quadrotors based on nonlinear model predictive control (NMPC). Unlike conventional approaches, our method preserves the full dynamics without simplification and utilizes actuator commands directly as control inputs. Notably, we incorporate a first-order servo model within the NMPC framework. Through simulation, we observe that integrating the servo dynamics not only enhances control performance but also accelerates convergence. To assess the efficacy of our approach, we fabricate a tiltable-quadrotor and deploy the algorithm onboard at a frequency of 100Hz. Extensive real-world experiments demonstrate rapid, robust, and smooth pose tracking performance.
Create account to get full access
Overview
• This paper presents a servo integrated nonlinear model predictive control (SINMPC) approach for controlling tiltable-quadrotor aerial vehicles with overactuated systems.
• The key contributions include the development of a comprehensive nonlinear model of the tiltable-quadrotor system, the formulation of a SINMPC controller that integrates servo dynamics, and the experimental validation of the proposed approach.
Plain English Explanation
Quadrotor drones are popular for a variety of applications, from photography to search and rescue. However, standard quadrotors can be limited in their maneuverability and agility due to their fixed rotor configuration. To address this, researchers have explored the use of "tiltable-quadrotors" - quadrotors with rotors that can tilt or pivot.
This paper presents a control system designed specifically for tiltable-quadrotors. The core idea is to use a data-driven system identification approach to develop a detailed nonlinear model of the quadrotor's dynamics, including the complex interactions between the tilting rotors and the vehicle's motion.
The researchers then use this model to design a servo integrated nonlinear model predictive control (SINMPC) system. This advanced control algorithm can predict the future behavior of the quadrotor and optimize the control inputs to achieve precise, agile flight. Importantly, the SINMPC controller also accounts for the dynamics of the servo motors that tilt the rotors, creating a fully integrated control system.
Through experimental validation, the researchers demonstrate that this SINMPC approach can enable tiltable-quadrotors to perform complex, high-speed maneuvers that would be difficult or impossible with traditional quadrotor control systems. This could unlock new applications for these highly maneuverable aerial vehicles, such as low-cost adaptive obstacle avoidance or rapid flight through cluttered environments.
Technical Explanation
This paper develops a servo integrated nonlinear model predictive control (SINMPC) framework for controlling highly maneuverable tiltable-quadrotor aerial vehicles. The key technical elements include:
-
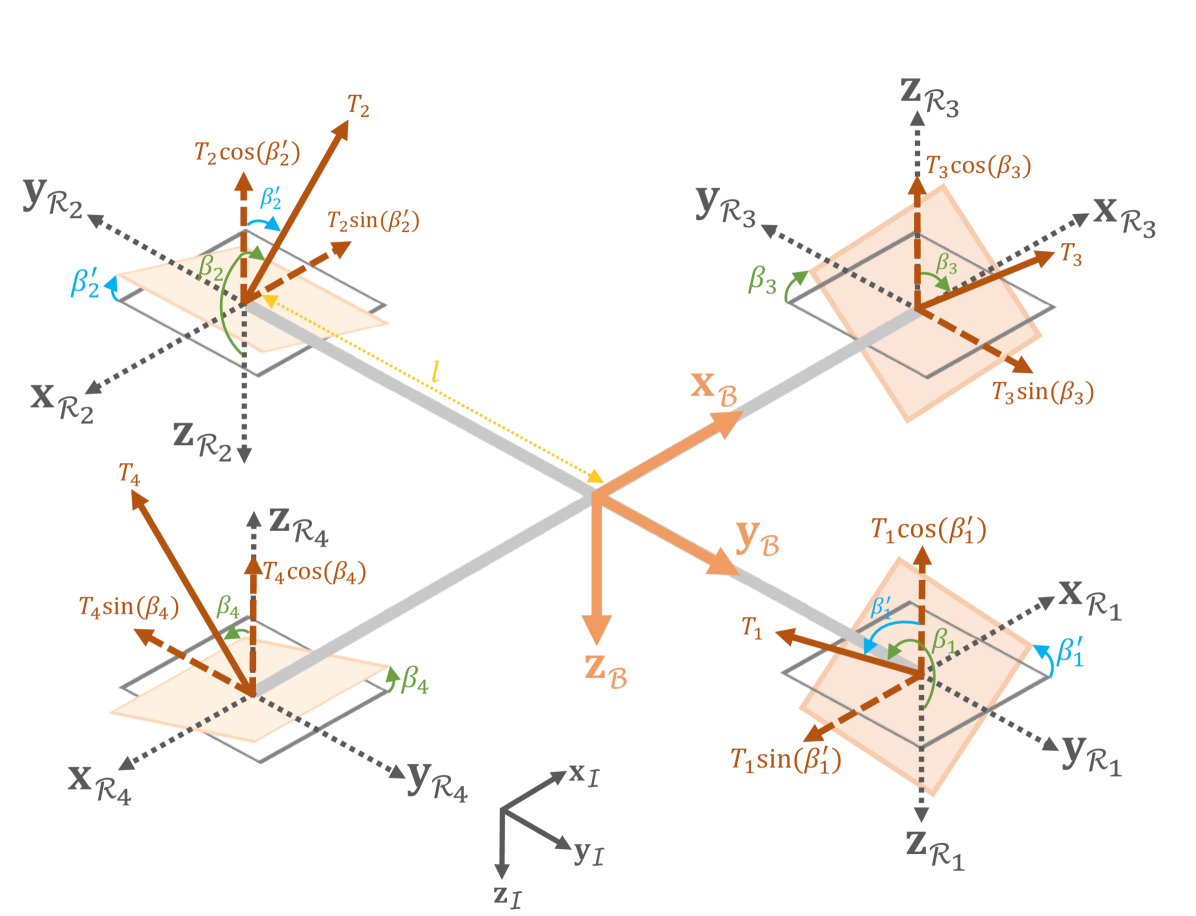
Nonlinear Quadrotor Model: The researchers derived a comprehensive nonlinear model of the tiltable-quadrotor system, capturing the complex interactions between the tilting rotors, the vehicle's rigid-body dynamics, and the servo actuation system.
-
SINMPC Formulation: The SINMPC controller was designed to optimize the quadrotor's future behavior over a prediction horizon, taking into account the nonlinear dynamics and the servo dynamics. This allows the controller to precisely coordinate the tilting of the rotors to achieve desired maneuvers.
-
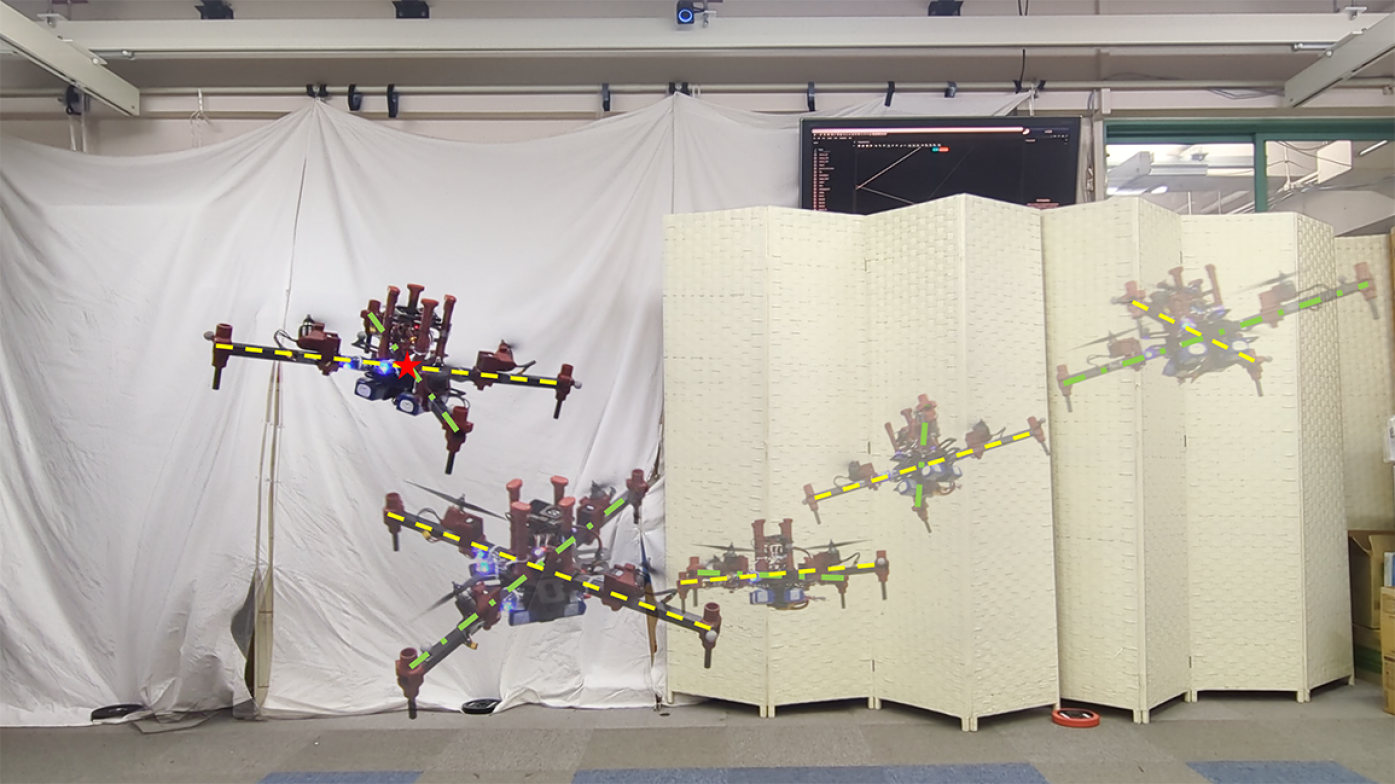
Experimental Validation: The proposed SINMPC approach was experimentally validated on a custom-built tiltable-quadrotor platform. The results demonstrate the system's ability to perform aggressive, high-speed maneuvers that would be challenging for traditional quadrotor control systems.
Critical Analysis
The paper provides a comprehensive and well-designed approach to controlling tiltable-quadrotor systems. The nonlinear modeling and model predictive control formulation are technically sound and the experimental validation demonstrates the practical feasibility of the approach.
However, the paper does not address certain limitations or potential issues. For example, the control system is designed for a single quadrotor platform and may require extensive retuning or adaptation for different vehicle configurations. Additionally, the experimental validation was conducted in a controlled laboratory setting, and the performance of the SINMPC controller in real-world, cluttered environments with obstacles and disturbances is not thoroughly explored.
Further research could investigate the robustness of the SINMPC approach to modeling uncertainties, sensor noise, and external disturbances. Additionally, the computational complexity of the SINMPC algorithm and its suitability for real-time implementation on embedded systems could be analyzed in more depth.
Conclusion
This paper presents a servo integrated nonlinear model predictive control (SINMPC) framework for controlling highly maneuverable tiltable-quadrotor aerial vehicles. The researchers developed a comprehensive nonlinear model of the tiltable-quadrotor system and used this model to design a SINMPC controller that integrates the servo dynamics. The proposed approach was experimentally validated and shown to enable precise, high-speed maneuvers that would be challenging for traditional quadrotor control systems.
This work could have significant implications for the development of advanced aerial vehicles capable of navigating cluttered environments and performing complex tasks. The SINMPC approach could unlock new applications for tiltable-quadrotors, such as low-cost adaptive obstacle avoidance and rapid flight through challenging environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Nonlinear Model Predictive Control of Tiltrotor Quadrotors with Feasible Control Allocation
Zeinab Shayan, Jann Cristobal, Mohammadreza Izadi, Amin Yazdanshenas, Mehdi Naderi, Reza Faieghi
0
0
This paper presents a new flight control framework for tilt-rotor multirotor uncrewed aerial vehicles (MRUAVs). Tiltrotor designs offer full actuation but introduce complexity in control allocation due to actuator redundancy. We propose a new approach where the allocator is tightly coupled with the controller, ensuring that the control signals generated by the controller are feasible within the vehicle actuation space. We leverage nonlinear model predictive control (NMPC) to implement the above framework, providing feasible control signals and optimizing performance. This unified control structure simultaneously manages both position and attitude, which eliminates the need for cascaded position and attitude control loops. Extensive numerical experiments demonstrate that our approach significantly outperforms conventional techniques that are based on linear quadratic regulator (LQR) and sliding mode control (SMC), especially in high-acceleration trajectories and disturbance rejection scenarios, making the proposed approach a viable option for enhanced control precision and robustness, particularly in challenging missions.
6/26/2024
Multi-Model Predictive Attitude Control of Quadrotors
Mohammadreza Izadi, Zeinab Shayan, Reza Faieghi
0
0
This paper introduces a new multi-model predictive control (MMPC) method for quadrotor attitude control with performance nearly on par with nonlinear model predictive control (NMPC) and computational efficiency similar to linear model predictive control (LMPC). Conventional NMPC, while effective, is computationally intensive, especially for attitude control that needs a high refresh rate. Conversely, LMPC offers computational advantages but suffers from poor performance and local stability. Our approach relies on multiple linear models of attitude dynamics, each accompanied by a linear model predictive controller, dynamically switching between them given flight conditions. We leverage gap metric analysis to minimize the number of models required to accurately predict the vehicle behavior in various conditions and incorporate a soft switching mechanism to ensure system stability during controller transitions. Our results show that with just 15 models, the vehicle attitude can be accurately controlled across various set points. Comparative evaluations with existing controllers such as incremental nonlinear dynamic inversion, sliding mode control, LMPC, and NMPC reveal that our approach closely matches the effectiveness of NMPC, outperforming other methods, with a running time comparable to LMPC.
6/26/2024
Closed-Loop Model Identification and MPC-based Navigation of Quadcopters: A Case Study of Parrot Bebop 2
Mohsen Amiri, Mehdi Hosseinzadeh
0
0
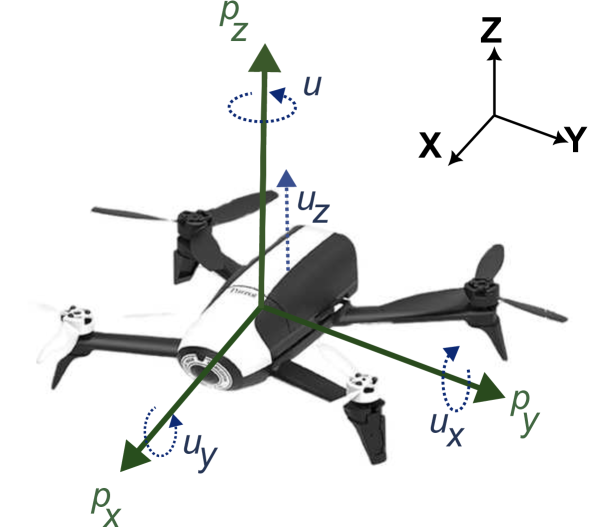
The growing potential of quadcopters in various domains, such as aerial photography, search and rescue, and infrastructure inspection, underscores the need for real-time control under strict safety and operational constraints. This challenge is compounded by the inherent nonlinear dynamics of quadcopters and the on-board computational limitations they face. This paper aims at addressing these challenges. First, this paper presents a comprehensive procedure for deriving a linear yet efficient model to describe the dynamics of quadrotors, thereby reducing complexity without compromising efficiency. Then, this paper develops a steady-state-aware Model Predictive Control (MPC) to effectively navigate quadcopters, while guaranteeing constraint satisfaction at all times. The main advantage of the steady-state-aware MPC is its low computational complexity, which makes it an appropriate choice for systems with limited computing capacity, like quadcopters. This paper considers Parrot Bebop 2 as the running example, and experimentally validates and evaluates the proposed algorithms.
4/12/2024

Embedded Hierarchical MPC for Autonomous Navigation
Dennis Benders, Johannes Kohler, Thijs Niesten, Robert Babuv{s}ka, Javier Alonso-Mora, Laura Ferranti
0
0
To efficiently deploy robotic systems in society, mobile robots need to autonomously and safely move through complex environments. Nonlinear model predictive control (MPC) methods provide a natural way to find a dynamically feasible trajectory through the environment without colliding with nearby obstacles. However, the limited computation power available on typical embedded robotic systems, such as quadrotors, poses a challenge to running MPC in real-time, including its most expensive tasks: constraints generation and optimization. To address this problem, we propose a novel hierarchical MPC scheme that interconnects a planning and a tracking layer. The planner constructs a trajectory with a long prediction horizon at a slow rate, while the tracker ensures trajectory tracking at a relatively fast rate. We prove that the proposed framework avoids collisions and is recursively feasible. Furthermore, we demonstrate its effectiveness in simulations and lab experiments with a quadrotor that needs to reach a goal position in a complex static environment. The code is efficiently implemented on the quadrotor's embedded computer to ensure real-time feasibility. Compared to a state-of-the-art single-layer MPC formulation, this allows us to increase the planning horizon by a factor of 5, which results in significantly better performance.
6/18/2024