Radio Resource Management and Path Planning in Intelligent Transportation Systems via Reinforcement Learning for Environmental Sustainability

0

Sign in to get full access
Overview
- This research paper explores the use of reinforcement learning to manage radio resources and plan paths for vehicles in intelligent transportation systems, with the goal of improving environmental sustainability.
- The study proposes a Multi-Agent Deep Deterministic Policy Gradient (MADDPG) algorithm to coordinate resource allocation and path planning among multiple vehicles and infrastructure components.
- The researchers evaluate the proposed approach through simulations, assessing its performance in terms of resource utilization, area of interest coverage, and environmental impact.
Plain English Explanation
The paper examines how reinforcement learning can be used to efficiently manage radio resources and plan the routes of vehicles in intelligent transportation systems, with the aim of reducing the environmental impact of transportation. The researchers develop a multi-agent algorithm called MADDPG that allows different vehicles and infrastructure components to work together to allocate resources and determine the best paths for the vehicles to take.
Through computer simulations, the team evaluates how well their approach performs in terms of utilizing radio resources effectively, ensuring that important areas are adequately covered, and minimizing the environmental footprint of the transportation system. The goal is to find ways to make transportation networks more sustainable by coordinating the decision-making of the various elements, rather than having each vehicle or infrastructure component operate independently.
Technical Explanation
The paper presents a reinforcement learning-based approach for coordinating radio resource management and path planning in intelligent transportation systems. The proposed solution uses a Multi-Agent Deep Deterministic Policy Gradient (MADDPG) algorithm to enable multiple vehicles and infrastructure components to collaborate on resource allocation and path planning decisions.
The researchers evaluate their approach through simulations that assess metrics such as resource utilization, area of interest (AoI) coverage, and environmental impact. The results demonstrate the effectiveness of the MADDPG-based coordination in optimizing trajectory and radio resource usage to achieve the desired environmental sustainability goals.
Critical Analysis
The paper provides a promising approach to addressing the challenges of resource management and path planning in intelligent transportation systems, with a focus on environmental sustainability. The use of reinforcement learning, specifically the MADDPG algorithm, allows the system to adapt to dynamic conditions and coordinate the decision-making of multiple agents.
However, the paper does not discuss the potential computational complexity of the MADDPG algorithm, which could be a concern for real-world deployment in large-scale transportation networks. Additionally, the simulations may not fully capture the complexities of real-world transportation scenarios, such as unpredictable human driver behavior or unexpected environmental conditions.
Further research could explore the scalability and robustness of the proposed approach, as well as investigate ways to integrate it with other decision-making frameworks for autonomous vehicles or optimize resource allocation in multi-modal transportation networks.
Conclusion
This research paper presents a novel approach to managing radio resources and planning paths for vehicles in intelligent transportation systems, with the goal of improving environmental sustainability. The use of a multi-agent reinforcement learning algorithm, specifically MADDPG, allows for coordinated decision-making among various transportation system components.
The simulation results demonstrate the potential of this approach to optimize resource utilization, ensure adequate coverage of important areas, and minimize the environmental impact of transportation. While further research is needed to address the practical challenges of real-world deployment, this work represents an important step towards developing more sustainable and efficient transportation systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Radio Resource Management and Path Planning in Intelligent Transportation Systems via Reinforcement Learning for Environmental Sustainability
S. Norouzi, N. Azarasa, M. R. Abedi, N. Mokari, S. E. Seyedabrishami, H. Saeedi, E. A. Jorswieck
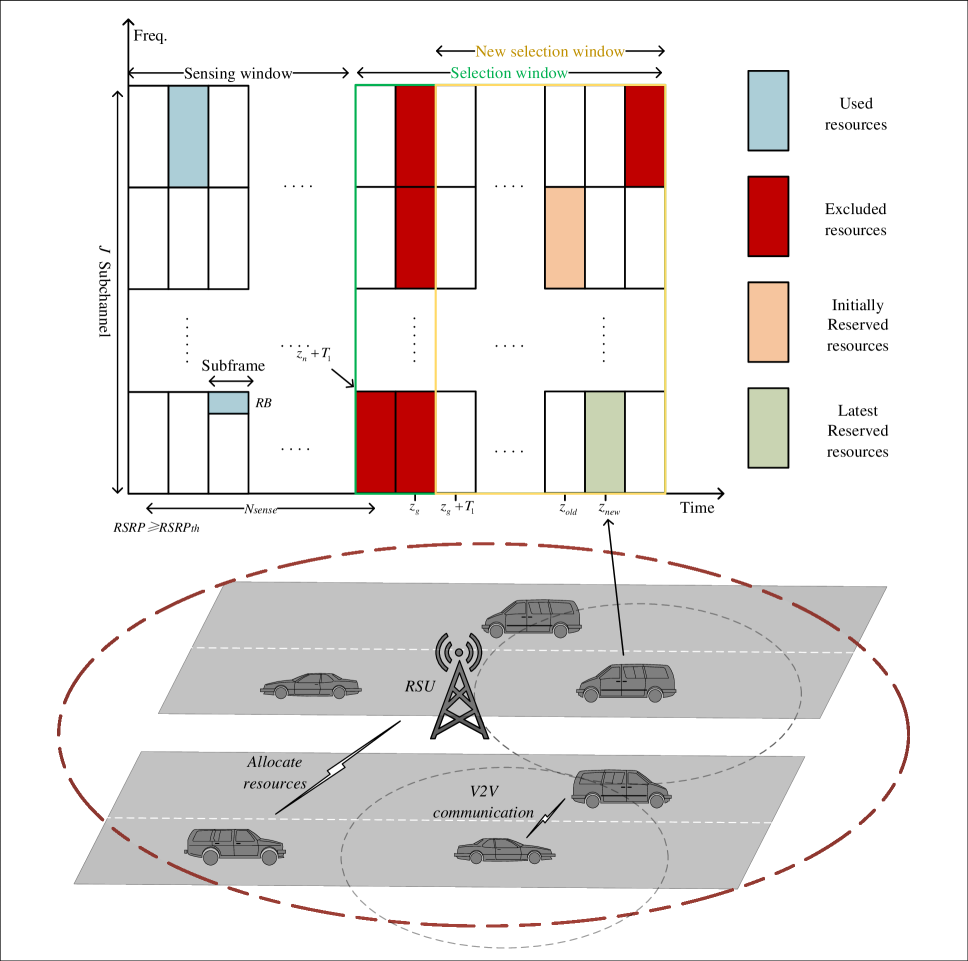
Efficient and dynamic path planning has become an important topic for urban areas with larger density of connected vehicles (CV) which results in reduction of travel time and directly contributes to environmental sustainability through reducing energy consumption. CVs exploit the cellular wireless vehicle-to-everything (C-V2X) communication technology to disseminate the vehicle-to-infrastructure (V2I) messages to the Base-station (BS) to improve situation awareness on urban roads. In this paper, we investigate radio resource management (RRM) in such a framework to minimize the age of information (AoI) so as to enhance path planning results. We use the fact that V2I messages with lower AoI value result in less error in estimating the road capacity and more accurate path planning. Through simulations, we compare road travel times and volume over capacity (V/C) against different levels of AoI and demonstrate the promising performance of the proposed framework.
Read more5/15/2024
0
Joint Optimization of Age of Information and Energy Consumption in NR-V2X System based on Deep Reinforcement Learning
Shulin Song, Zheng Zhang, Qiong Wu, Qiang Fan, Pingyi Fan
Autonomous driving may be the most important application scenario of next generation, the development of wireless access technologies enabling reliable and low-latency vehicle communication becomes crucial. To address this, 3GPP has developed Vehicle-to-Everything (V2X) specifications based on 5G New Radio (NR) technology, where Mode 2 Side-Link (SL) communication resembles Mode 4 in LTE-V2X, allowing direct communication between vehicles. This supplements SL communication in LTE-V2X and represents the latest advancement in cellular V2X (C-V2X) with improved performance of NR-V2X. However, in NR-V2X Mode 2, resource collisions still occur, and thus degrade the age of information (AOI). Therefore, a interference cancellation method is employed to mitigate this impact by combining NR-V2X with Non-Orthogonal multiple access (NOMA) technology. In NR-V2X, when vehicles select smaller resource reservation interval (RRI), higher-frequency transmissions take ore energy to reduce AoI. Hence, it is important to jointly consider AoI and communication energy consumption based on NR-V2X communication. Then, we formulate such an optimization problem and employ the Deep Reinforcement Learning (DRL) algorithm to compute the optimal transmission RRI and transmission power for each transmitting vehicle to reduce the energy consumption of each transmitting vehicle and the AoI of each receiving vehicle. Extensive simulations have demonstrated the performance of our proposed algorithm.
Read more7/12/2024

0
Deep-Reinforcement-Learning-Based AoI-Aware Resource Allocation for RIS-Aided IoV Networks
Kangwei Qi, Qiong Wu, Pingyi Fan, Nan Cheng, Wen Chen, Jiangzhou Wang, Khaled B. Letaief
Reconfigurable Intelligent Surface (RIS) is a pivotal technology in communication, offering an alternative path that significantly enhances the link quality in wireless communication environments. In this paper, we propose a RIS-assisted internet of vehicles (IoV) network, considering the vehicle-to-everything (V2X) communication method. In addition, in order to improve the timeliness of vehicle-to-infrastructure (V2I) links and the stability of vehicle-to-vehicle (V2V) links, we introduce the age of information (AoI) model and the payload transmission probability model. Therefore, with the objective of minimizing the AoI of V2I links and prioritizing transmission of V2V links payload, we construct this optimization problem as an Markov decision process (MDP) problem in which the BS serves as an agent to allocate resources and control phase-shift for the vehicles using the soft actor-critic (SAC) algorithm, which gradually converges and maintains a high stability. A AoI-aware joint vehicular resource allocation and RIS phase-shift control scheme based on SAC algorithm is proposed and simulation results show that its convergence speed, cumulative reward, AoI performance, and payload transmission probability outperforms those of proximal policy optimization (PPO), deep deterministic policy gradient (DDPG), twin delayed deep deterministic policy gradient (TD3) and stochastic algorithms.
Read more6/18/2024
0
To RL or not to RL? An Algorithmic Cheat-Sheet for AI-Based Radio Resource Management
Lorenzo Maggi, Matthew Andrews, Ryo Koblitz
Several Radio Resource Management (RRM) use cases can be framed as sequential decision planning problems, where an agent (the base station, typically) makes decisions that influence the network utility and state. While Reinforcement Learning (RL) in its general form can address this scenario, it is known to be sample inefficient. Following the principle of Occam's razor, we argue that the choice of the solution technique for RRM should be guided by questions such as, Is it a short or long-term planning problem?, Is the underlying model known or does it need to be learned?, Can we solve the problem analytically? or Is an expert-designed policy available?. A wide range of techniques exists to address these questions, including static and stochastic optimization, bandits, model predictive control (MPC) and, indeed, RL. We review some of these techniques that have already been successfully applied to RRM, and we believe that others, such as MPC, may present exciting research opportunities for the future.
Read more5/31/2024