RangeLDM: Fast Realistic LiDAR Point Cloud Generation

0
Sign in to get full access
Overview
- RangeLDM is a fast and realistic LiDAR point cloud generation model.
- It uses a diffusion model approach to generate 3D point clouds that resemble real LiDAR data.
- The model is designed to be efficient and produce high-quality results quickly.
Plain English Explanation
RangeLDM: Fast Realistic LiDAR Point Cloud Generation is a research paper that introduces a new way to generate 3D point cloud data that looks and behaves like data collected from real LiDAR sensors. LiDAR (Light Detection and Ranging) is a remote sensing technology that uses laser light to measure distances, and it is commonly used in autonomous vehicles, robotics, and other applications that require accurate 3D maps of the environment.
The key idea behind RangeLDM is to use a diffusion model, which is a type of machine learning algorithm that can generate realistic-looking data by gradually transforming simple random noise into more complex and structured outputs. In this case, the diffusion model is trained on real LiDAR data, and it can then generate new point cloud data that shares the same statistical properties and visual characteristics as the real data.
One of the main advantages of RangeLDM is that it can generate these point clouds quickly and efficiently, making it useful for applications that require real-time or near-real-time 3D data generation, such as simulations or testing of autonomous systems. The authors also show that the generated point clouds are highly realistic, with detailed features and accurate representation of objects and surfaces in the environment.
Technical Explanation
The RangeLDM paper proposes a novel approach for generating realistic LiDAR point clouds using a diffusion model. Diffusion models are a type of generative model that work by gradually transforming simple random noise into more complex and structured data, similar to how a drop of ink diffuses in water.
The key elements of the RangeLDM approach include:
-
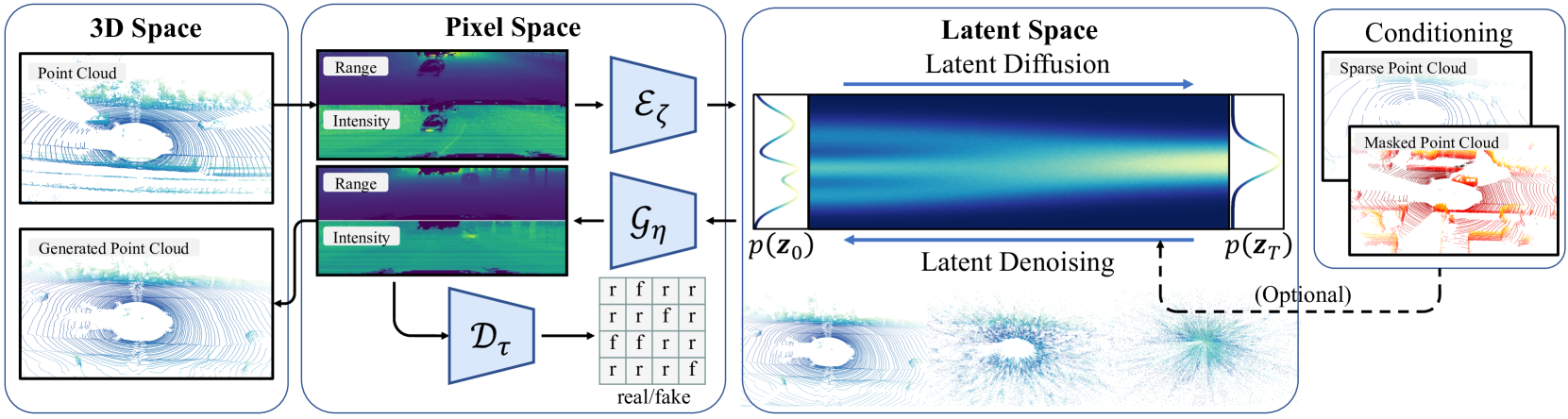
LiDAR Representation: The authors represent the LiDAR data in a range view format, which encodes the depth and reflectance information for each laser beam in a 2D image-like structure. This representation allows the model to efficiently process and generate the point cloud data.
-
Diffusion Model Architecture: The RangeLDM model is based on a Latent Diffusion architecture, which combines a diffusion model with a convolutional neural network (CNN) encoder-decoder structure. This allows the model to capture the complex 3D structure of the point clouds while maintaining efficient inference.
-
Training and Inference: The RangeLDM model is trained on a large dataset of real LiDAR point clouds, and during inference, it can generate new point clouds by iteratively refining random noise using the learned diffusion process. The authors demonstrate that this approach can generate high-quality point clouds significantly faster than previous methods.
Critical Analysis
The RangeLDM paper presents a compelling approach for generating realistic LiDAR point clouds, but there are a few potential limitations and areas for further research:
-
Dataset Bias: The quality of the generated point clouds is heavily dependent on the diversity and realism of the training data. If the dataset used to train the model does not capture the full range of real-world scenarios, the generated point clouds may not be representative of all possible environments.
-
Generalization Capabilities: The paper focuses on evaluating the model's performance on synthetic test sets, but it's unclear how well the RangeLDM model would generalize to real-world LiDAR data from diverse sources and sensors. Further testing on a broader range of datasets would help assess the model's robustness.
-
Application-specific Optimization: While the RangeLDM model is designed to be efficient, there may be opportunities to further optimize its performance for specific use cases, such as by incorporating domain-specific constraints or architectural modifications.
-
Interpretability and Explainability: As with many deep learning models, the internal workings of the RangeLDM model may be difficult to interpret, which could limit its transparency and make it harder to understand its failure modes or biases.
Overall, the RangeLDM paper presents an exciting and practical approach for generating realistic LiDAR data, with potential applications in areas such as autonomous systems, robotics, and virtual environments. Further research and development in this area could lead to even more advanced and versatile point cloud generation capabilities.
Conclusion
The RangeLDM paper introduces a novel diffusion model-based approach for generating realistic LiDAR point clouds quickly and efficiently. By representing the LiDAR data in a range view format and using a latent diffusion architecture, the RangeLDM model can produce high-quality 3D point clouds that closely resemble real-world LiDAR data.
This research has important implications for a wide range of applications, including autonomous vehicles, robotics, and virtual environments, where accurate and realistic 3D data is essential for testing, simulation, and training. The ability to generate synthetic LiDAR data on-the-fly could also lead to advancements in areas like data augmentation and active learning, further expanding the capabilities of these technologies.
While the RangeLDM model shows promising results, there are still opportunities for further research and development, such as addressing dataset bias, improving generalization, and enhancing the interpretability of the model. Overall, this work represents an important step forward in the quest to create more realistic and accessible 3D data for a variety of cutting-edge applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
RangeLDM: Fast Realistic LiDAR Point Cloud Generation
Qianjiang Hu, Zhimin Zhang, Wei Hu
Autonomous driving demands high-quality LiDAR data, yet the cost of physical LiDAR sensors presents a significant scaling-up challenge. While recent efforts have explored deep generative models to address this issue, they often consume substantial computational resources with slow generation speeds while suffering from a lack of realism. To address these limitations, we introduce RangeLDM, a novel approach for rapidly generating high-quality range-view LiDAR point clouds via latent diffusion models. We achieve this by correcting range-view data distribution for accurate projection from point clouds to range images via Hough voting, which has a critical impact on generative learning. We then compress the range images into a latent space with a variational autoencoder, and leverage a diffusion model to enhance expressivity. Additionally, we instruct the model to preserve 3D structural fidelity by devising a range-guided discriminator. Experimental results on KITTI-360 and nuScenes datasets demonstrate both the robust expressiveness and fast speed of our LiDAR point cloud generation.
Read more9/11/2024

0
Towards Realistic Scene Generation with LiDAR Diffusion Models
Haoxi Ran, Vitor Guizilini, Yue Wang
Diffusion models (DMs) excel in photo-realistic image synthesis, but their adaptation to LiDAR scene generation poses a substantial hurdle. This is primarily because DMs operating in the point space struggle to preserve the curve-like patterns and 3D geometry of LiDAR scenes, which consumes much of their representation power. In this paper, we propose LiDAR Diffusion Models (LiDMs) to generate LiDAR-realistic scenes from a latent space tailored to capture the realism of LiDAR scenes by incorporating geometric priors into the learning pipeline. Our method targets three major desiderata: pattern realism, geometry realism, and object realism. Specifically, we introduce curve-wise compression to simulate real-world LiDAR patterns, point-wise coordinate supervision to learn scene geometry, and patch-wise encoding for a full 3D object context. With these three core designs, our method achieves competitive performance on unconditional LiDAR generation in 64-beam scenario and state of the art on conditional LiDAR generation, while maintaining high efficiency compared to point-based DMs (up to 107$times$ faster). Furthermore, by compressing LiDAR scenes into a latent space, we enable the controllability of DMs with various conditions such as semantic maps, camera views, and text prompts.
Read more4/22/2024

0
Uplifting Range-View-based 3D Semantic Segmentation in Real-Time with Multi-Sensor Fusion
Shiqi Tan, Hamidreza Fazlali, Yixuan Xu, Yuan Ren, Bingbing Liu
Range-View(RV)-based 3D point cloud segmentation is widely adopted due to its compact data form. However, RV-based methods fall short in providing robust segmentation for the occluded points and suffer from distortion of projected RGB images due to the sparse nature of 3D point clouds. To alleviate these problems, we propose a new LiDAR and Camera Range-view-based 3D point cloud semantic segmentation method (LaCRange). Specifically, a distortion-compensating knowledge distillation (DCKD) strategy is designed to remedy the adverse effect of RV projection of RGB images. Moreover, a context-based feature fusion module is introduced for robust and preservative sensor fusion. Finally, in order to address the limited resolution of RV and its insufficiency of 3D topology, a new point refinement scheme is devised for proper aggregation of features in 2D and augmentation of point features in 3D. We evaluated the proposed method on large-scale autonomous driving datasets ie SemanticKITTI and nuScenes. In addition to being real-time, the proposed method achieves state-of-the-art results on nuScenes benchmark
Read more7/16/2024

0
LidarDM: Generative LiDAR Simulation in a Generated World
Vlas Zyrianov, Henry Che, Zhijian Liu, Shenlong Wang
We present LidarDM, a novel LiDAR generative model capable of producing realistic, layout-aware, physically plausible, and temporally coherent LiDAR videos. LidarDM stands out with two unprecedented capabilities in LiDAR generative modeling: (i) LiDAR generation guided by driving scenarios, offering significant potential for autonomous driving simulations, and (ii) 4D LiDAR point cloud generation, enabling the creation of realistic and temporally coherent sequences. At the heart of our model is a novel integrated 4D world generation framework. Specifically, we employ latent diffusion models to generate the 3D scene, combine it with dynamic actors to form the underlying 4D world, and subsequently produce realistic sensory observations within this virtual environment. Our experiments indicate that our approach outperforms competing algorithms in realism, temporal coherency, and layout consistency. We additionally show that LidarDM can be used as a generative world model simulator for training and testing perception models.
Read more4/4/2024