Real-time system optimal traffic routing under uncertainties -- Can physics models boost reinforcement learning?

0

Sign in to get full access
Overview
- This paper explores the use of physics models to boost reinforcement learning for real-time optimal traffic routing under uncertainties.
- The researchers investigate whether incorporating physical insights can improve the performance of reinforcement learning algorithms in this domain.
- The paper presents a novel approach that combines physics-based models with reinforcement learning to optimize traffic routing decisions in a dynamic and uncertain environment.
Plain English Explanation
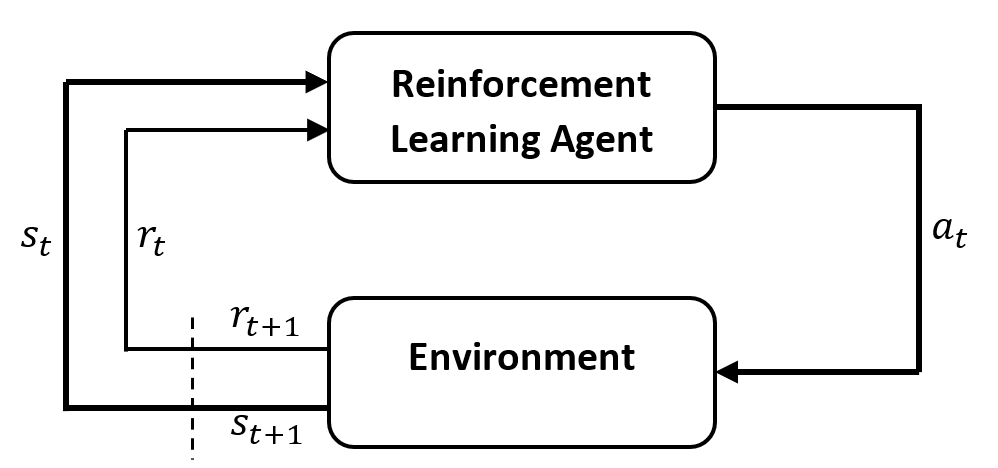
The paper looks at ways to improve how self-driving cars and transportation systems make decisions about the best routes to take. Traditionally, these systems have used reinforcement learning - a type of AI that learns by trial and error. The researchers wanted to see if incorporating more knowledge about the physical laws of traffic flow could make the reinforcement learning work better.
Imagine you're trying to get to work as quickly as possible, but there's a lot of unpredictable traffic on the roads. A basic reinforcement learning system might try different routes and see which one gets you there fastest. But it has to learn everything from scratch.
The idea in this paper is to give the reinforcement learning system some additional information about how traffic actually behaves, based on physics models. For example, it could learn that traffic tends to slow down when there are a lot of cars on the road, or that certain intersections are bottlenecks. With this extra knowledge, the system can make smarter decisions about the best route to take, without having to start from zero every time.
The researchers developed a new approach that combines physics-based models with reinforcement learning to optimize traffic routing in real-time, even when there's a lot of uncertainty about things like accidents or weather conditions. Their goal is to create transportation systems that can adapt quickly to changing conditions and get people to their destinations as efficiently as possible.
Technical Explanation
The paper presents a novel framework that integrates physics-based models with reinforcement learning to address the problem of real-time system optimal traffic routing under uncertainties. The key idea is to leverage physical insights about traffic flow dynamics to boost the performance of reinforcement learning algorithms in this domain.
The authors develop a two-level hierarchical control architecture. The upper-level controller uses a physics-informed deep reinforcement learning (RL) model to make high-level routing decisions that optimize for system-wide objectives, such as minimizing total travel time. The lower-level controller then uses a model predictive control (MPC) approach based on a macroscopic traffic flow model to generate real-time, vehicle-specific control actions that implement the high-level routing decisions.
The physics-informed deep RL model incorporates traffic flow theory, including the fundamental diagram of traffic, to capture the nonlinear and stochastic nature of traffic dynamics. This allows the model to reason about the effects of its routing decisions on future traffic conditions, rather than relying solely on historical data.
The authors evaluate their approach on a large-scale urban road network with various sources of uncertainty, such as incidents and weather conditions. The results demonstrate that the physics-informed deep RL model outperforms traditional deep RL and rule-based approaches in terms of total travel time, travel time reliability, and computational efficiency.
The key technical contributions of the paper include:
- A hierarchical control architecture that integrates physics-based models and reinforcement learning for real-time optimal traffic routing.
- A physics-informed deep RL model that leverages traffic flow theory to improve decision-making under uncertainty.
- A comprehensive evaluation of the proposed approach on a realistic large-scale urban road network.
Critical Analysis
The paper presents a compelling approach to leveraging physical insights to boost the performance of reinforcement learning for real-time traffic routing. The authors' use of a hierarchical control architecture with a physics-informed deep RL model at the upper level is a promising way to combine the strengths of model-based and model-free techniques.
One potential limitation of the research is the reliance on a macroscopic traffic flow model, which may not capture all the nuances of individual vehicle behavior. It would be interesting to see how the approach performs when integrating more detailed microscopic traffic simulations or real-world vehicle sensor data.
Additionally, the paper does not explicitly address the challenge of transferring the learned policies to new road networks or situations with significantly different traffic patterns. Further research on the generalization capabilities of the physics-informed deep RL model would be valuable.
Finally, while the authors demonstrate the computational efficiency of their approach, it would be helpful to understand the training time and computational overhead required to deploy the system in a real-world setting. Comparisons to other state-of-the-art traffic optimization techniques could provide valuable insights.
Overall, this paper makes an important contribution to the field of reinforcement learning for transportation systems, highlighting the potential benefits of incorporating physical knowledge to improve decision-making under uncertainty. The reported results are promising, and the proposed framework could have significant implications for the development of more intelligent and adaptive traffic management systems.
Conclusion
This paper explores a novel approach to real-time optimal traffic routing that combines physics-based models with reinforcement learning. By incorporating traffic flow theory into the deep RL model, the researchers were able to improve the system's decision-making under various sources of uncertainty, such as incidents and weather conditions.
The hierarchical control architecture and the physics-informed deep RL model demonstrated superior performance in terms of total travel time, travel time reliability, and computational efficiency compared to traditional deep RL and rule-based approaches. This work represents an important step towards developing more intelligent and adaptive transportation systems that can optimize traffic flows in real-time, with the potential to significantly improve mobility and reduce congestion in urban environments.
Future research could explore integrating more detailed microscopic traffic simulations, investigating the generalization capabilities of the approach, and analyzing the computational requirements for real-world deployment. Nonetheless, this paper provides a promising framework for leveraging physical insights to boost the effectiveness of reinforcement learning in the domain of transportation optimization.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Real-time system optimal traffic routing under uncertainties -- Can physics models boost reinforcement learning?
Zemian Ke, Qiling Zou, Jiachao Liu, Sean Qian
System optimal traffic routing can mitigate congestion by assigning routes for a portion of vehicles so that the total travel time of all vehicles in the transportation system can be reduced. However, achieving real-time optimal routing poses challenges due to uncertain demands and unknown system dynamics, particularly in expansive transportation networks. While physics model-based methods are sensitive to uncertainties and model mismatches, model-free reinforcement learning struggles with learning inefficiencies and interpretability issues. Our paper presents TransRL, a novel algorithm that integrates reinforcement learning with physics models for enhanced performance, reliability, and interpretability. TransRL begins by establishing a deterministic policy grounded in physics models, from which it learns from and is guided by a differentiable and stochastic teacher policy. During training, TransRL aims to maximize cumulative rewards while minimizing the Kullback Leibler (KL) divergence between the current policy and the teacher policy. This approach enables TransRL to simultaneously leverage interactions with the environment and insights from physics models. We conduct experiments on three transportation networks with up to hundreds of links. The results demonstrate TransRL's superiority over traffic model-based methods for being adaptive and learning from the actual network data. By leveraging the information from physics models, TransRL consistently outperforms state-of-the-art reinforcement learning algorithms such as proximal policy optimization (PPO) and soft actor critic (SAC). Moreover, TransRL's actions exhibit higher reliability and interpretability compared to baseline reinforcement learning approaches like PPO and SAC.
Read more7/11/2024
0
Adaptive Traffic Signal Control Using Reinforcement Learning
Muhammad Tahir Rafique, Ahmed Mustafa, Hasan Sajid
The growing demand for road use in urban areas has led to significant traffic congestion, posing challenges that are costly to mitigate through infrastructure expansion alone. As an alternative, optimizing existing traffic management systems, particularly through adaptive traffic signal control, offers a promising solution. This paper explores the use of Reinforcement Learning (RL) to enhance traffic signal operations at intersections, aiming to reduce congestion without extensive sensor networks. We introduce two RL-based algorithms: a turn-based agent, which dynamically prioritizes traffic signals based on real-time queue lengths, and a time-based agent, which adjusts signal phase durations according to traffic conditions while following a fixed phase cycle. By representing the state as a scalar queue length, our approach simplifies the learning process and lowers deployment costs. The algorithms were tested in four distinct traffic scenarios using seven evaluation metrics to comprehensively assess performance. Simulation results demonstrate that both RL algorithms significantly outperform conventional traffic signal control systems, highlighting their potential to improve urban traffic flow efficiently.
Read more9/4/2024
0
Autonomous vehicle decision and control through reinforcement learning with traffic flow randomization
Yuan Lin, Antai Xie, Xiao Liu
Most of the current studies on autonomous vehicle decision-making and control tasks based on reinforcement learning are conducted in simulated environments. The training and testing of these studies are carried out under rule-based microscopic traffic flow, with little consideration of migrating them to real or near-real environments to test their performance. It may lead to a degradation in performance when the trained model is tested in more realistic traffic scenes. In this study, we propose a method to randomize the driving style and behavior of surrounding vehicles by randomizing certain parameters of the car-following model and the lane-changing model of rule-based microscopic traffic flow in SUMO. We trained policies with deep reinforcement learning algorithms under the domain randomized rule-based microscopic traffic flow in freeway and merging scenes, and then tested them separately in rule-based microscopic traffic flow and high-fidelity microscopic traffic flow. Results indicate that the policy trained under domain randomization traffic flow has significantly better success rate and calculative reward compared to the models trained under other microscopic traffic flows.
Read more4/22/2024
🤿
0
Closed-form congestion control via deep symbolic regression
Jean Martins, Igor Almeida, Ricardo Souza, Silvia Lins
As mobile networks embrace the 5G era, the interest in adopting Reinforcement Learning (RL) algorithms to handle challenges in ultra-low-latency and high throughput scenarios increases. Simultaneously, the advent of packetized fronthaul networks imposes demanding requirements that traditional congestion control mechanisms cannot accomplish, highlighting the potential of RL-based congestion control algorithms. Although learning RL policies optimized for satisfying the stringent fronthaul requirements is feasible, the adoption of neural network models in real deployments still poses some challenges regarding real-time inference and interpretability. This paper proposes a methodology to deal with such challenges while maintaining the performance and generalization capabilities provided by a baseline RL policy. The method consists of (1) training a congestion control policy specialized in fronthaul-like networks via reinforcement learning, (2) collecting state-action experiences from the baseline, and (3) performing deep symbolic regression on the collected dataset. The proposed process overcomes the challenges related to inference-time limitations through closed-form expressions that approximate the baseline performance (link utilization, delay, and fairness) and which can be directly implemented in any programming language. Finally, we analyze the inner workings of the closed-form expressions.
Read more5/3/2024