Real-to-Sim Deformable Object Manipulation: Optimizing Physics Models with Residual Mappings for Robotic Surgery

0

Sign in to get full access
Overview
- This paper presents a method for optimizing physics models used in simulations of deformable object manipulation, with a focus on applications in robotic surgery.
- The key idea is to use a "residual mapping" to correct the discrepancies between the simulated and real-world physics of deformable objects.
- The authors demonstrate their approach on both simulated and real-world experiments, showing improved performance in tasks such as object grasping and suturing.
Plain English Explanation
When working with robots that interact with soft, deformable objects, it's important to have accurate simulations of how those objects behave. However, it can be challenging to perfectly model the complex physics governing the deformation of real-world materials like tissues or fabrics.
The researchers in this paper developed a way to improve the realism of these simulations by using a "residual mapping." Essentially, they trained a neural network to learn the differences between how objects behave in the simulation versus in the real world. This allows the simulation to be "corrected" to more closely match reality.
The main benefit of this approach is that it enables robots to practice challenging manipulation tasks, like delicate surgical procedures, in a simulation environment that more accurately reflects the real-world physics. This can lead to better performance when the robot tries to perform those tasks in the physical world.
The researchers tested their method on a variety of simulated and real-world experiments, including object grasping and suturing. They found that the residual mapping approach led to improved task performance compared to using the standard physics simulation alone.
Technical Explanation
The paper proposes a method for optimizing the physics models used in simulations of deformable object manipulation, with the goal of bridging the "reality gap" between the simulation and the real world.
The key component is a "residual mapping" neural network that is trained to learn the differences between how objects behave in the simulation versus in the physical world. This residual mapping is then used to correct the simulation, making it more accurate.
Specifically, the authors first train a baseline physics simulation model using the [https://aimodels.fyi/papers/arxiv/soft-contact-simulation-manipulation-learning-deformable-objects](soft-contact simulation) and [https://aimodels.fyi/papers/arxiv/function-based-sim-to-real-learning-shape](sim-to-real learning) techniques. They then collect data by performing manipulation tasks in both the simulation and the real world, and use this data to train the residual mapping network.
In their experiments, the authors evaluate this approach on a variety of tasks, including object grasping and suturing, both in simulation and on a real-world robotic platform. They show that the residual mapping leads to significant performance improvements compared to using the baseline physics simulation alone.
The authors also discuss the limitations of their approach, noting that it relies on having access to real-world data to train the residual mapping. They suggest that further research is needed to reduce the amount of real-world data required, perhaps by leveraging [https://aimodels.fyi/papers/arxiv/realistic-surgical-simulator-non-rigid-contact-rich](more realistic surgical simulations) or [https://aimodels.fyi/papers/arxiv/efficient-data-driven-scene-simulation-using-robotic](data-driven simulation techniques).
Critical Analysis
The paper presents a promising approach for improving the realism of physics simulations for deformable object manipulation, which is an important problem in areas like robotic surgery. The use of a residual mapping to correct the simulation's shortcomings is a clever idea that seems to yield tangible benefits in the authors' experiments.
One potential limitation of the approach is its reliance on having access to real-world data to train the residual mapping. In some applications, such data may be difficult or expensive to obtain. The authors acknowledge this challenge and suggest that future work could explore ways to reduce the data requirements, such as by using more sophisticated simulation techniques or additional physical modeling.
Another area for further research could be investigating the generalization capabilities of the residual mapping. The paper demonstrates good performance on the specific tasks tested, but it's unclear how well the approach would scale to a wider range of deformable objects and manipulation scenarios. Exploring the limits of the method's applicability would be a valuable contribution.
Overall, this paper presents a solid technical contribution and a potentially useful tool for improving the realism of deformable object simulations, with interesting implications for robotics and other fields that rely on accurate physical modeling.
Conclusion
This paper introduces a novel approach for optimizing the physics models used in simulations of deformable object manipulation, with a focus on applications in robotic surgery. The key idea is to use a "residual mapping" neural network to correct the discrepancies between the simulated and real-world physics of deformable objects.
The authors demonstrate the effectiveness of their method through a series of experiments, both in simulation and on a real-world robotic platform. Their results show that the residual mapping approach can significantly improve the performance of tasks like object grasping and suturing compared to using a baseline physics simulation alone.
While the paper's technical contributions are strong, the authors also acknowledge some limitations of their approach, such as the need for real-world data to train the residual mapping. Addressing these challenges through further research could expand the applicability of this technique and lead to even more realistic and effective simulations for deformable object manipulation.
Overall, this work represents an important step forward in bridging the gap between simulated and real-world physics, with promising implications for robotics, medical applications, and other fields that rely on accurate physical modeling.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Real-to-Sim Deformable Object Manipulation: Optimizing Physics Models with Residual Mappings for Robotic Surgery
Xiao Liang, Fei Liu, Yutong Zhang, Yuelei Li, Shan Lin, Michael Yip
Accurate deformable object manipulation (DOM) is essential for achieving autonomy in robotic surgery, where soft tissues are being displaced, stretched, and dissected. Many DOM methods can be powered by simulation, which ensures realistic deformation by adhering to the governing physical constraints and allowing for model prediction and control. However, real soft objects in robotic surgery, such as membranes and soft tissues, have complex, anisotropic physical parameters that a simulation with simple initialization from cameras may not fully capture. To use the simulation techniques in real surgical tasks, the real-to-sim gap needs to be properly compensated. In this work, we propose an online, adaptive parameter tuning approach for simulation optimization that (1) bridges the real-to-sim gap between a physics simulation and observations obtained 3D perceptions through estimating a residual mapping and (2) optimizes its stiffness parameters online. Our method ensures a small residual gap between the simulation and observation and improves the simulation's predictive capabilities. The effectiveness of the proposed mechanism is evaluated in the manipulation of both a thin-shell and volumetric tissue, representative of most tissue scenarios. This work contributes to the advancement of simulation-based deformable tissue manipulation and holds potential for improving surgical autonomy.
Read more5/31/2024

0
Sim-to-Real of Soft Robots with Learned Residual Physics
Junpeng Gao, Mike Yan Michelis, Andrew Spielberg, Robert K. Katzschmann
Accurately modeling soft robots in simulation is computationally expensive and commonly falls short of representing the real world. This well-known discrepancy, known as the sim-to-real gap, can have several causes, such as coarsely approximated geometry and material models, manufacturing defects, viscoelasticity and plasticity, and hysteresis effects. Residual physics networks learn from real-world data to augment a discrepant model and bring it closer to reality. Here, we present a residual physics method for modeling soft robots with large degrees of freedom. We train neural networks to learn a residual term -- the modeling error between simulated and physical systems. Concretely, the residual term is a force applied on the whole simulated mesh, while real position data is collected with only sparse motion markers. The physical prior of the analytical simulation provides a starting point for the residual network, and the combined model is more informed than if physics were learned tabula rasa. We demonstrate our method on 1) a silicone elastomeric beam and 2) a soft pneumatic arm with hard-to-model, anisotropic fiber reinforcements. Our method outperforms traditional system identification up to 60%. We show that residual physics need not be limited to low degrees of freedom but can effectively bridge the sim-to-real gap for high dimensional systems.
Read more9/10/2024
0
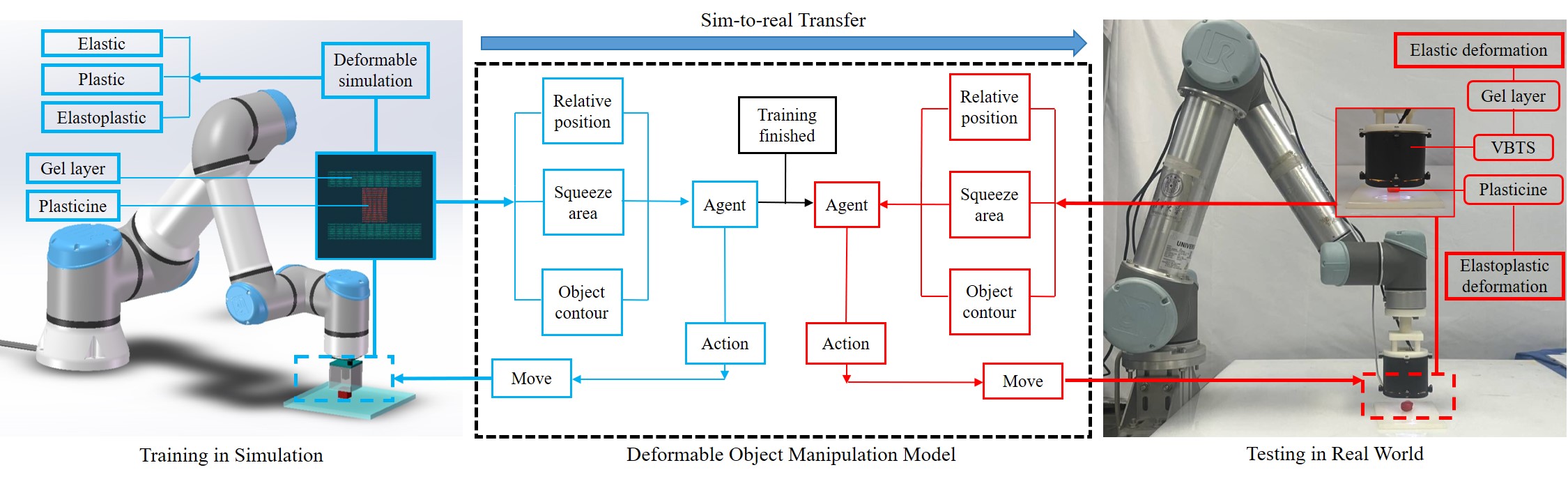
Soft Contact Simulation and Manipulation Learning of Deformable Objects with Vision-based Tactile Sensor
Jianhua Shan, Yuhao Sun, Shixin Zhang, Fuchun Sun, Zixi Chen, Zirong Shen, Cesare Stefanini, Yiyong Yang, Shan Luo, Bin Fang
Deformable object manipulation is a classical and challenging research area in robotics. Compared with rigid object manipulation, this problem is more complex due to the deformation properties including elastic, plastic, and elastoplastic deformation. In this paper, we describe a new deformable object manipulation method including soft contact simulation, manipulation learning, and sim-to-real transfer. We propose a novel approach utilizing Vision-Based Tactile Sensors (VBTSs) as the end-effector in simulation to produce observations like relative position, squeezed area, and object contour, which are transferable to real robots. For a more realistic contact simulation, a new simulation environment including elastic, plastic, and elastoplastic deformations is created. We utilize RL strategies to train agents in the simulation, and expert demonstrations are applied for challenging tasks. Finally, we build a real experimental platform to complete the sim-to-real transfer and achieve a 90% success rate on difficult tasks such as cylinder and sphere. To test the robustness of our method, we use plasticine of different hardness and sizes to repeat the tasks including cylinder and sphere. The experimental results show superior performances of deformable object manipulation with the proposed method.
Read more5/14/2024
🔄
0
Sim-To-Real Transfer for Visual Reinforcement Learning of Deformable Object Manipulation for Robot-Assisted Surgery
Paul Maria Scheikl, Eleonora Tagliabue, Bal'azs Gyenes, Martin Wagner, Diego Dall'Alba, Paolo Fiorini, Franziska Mathis-Ullrich
Automation holds the potential to assist surgeons in robotic interventions, shifting their mental work load from visuomotor control to high level decision making. Reinforcement learning has shown promising results in learning complex visuomotor policies, especially in simulation environments where many samples can be collected at low cost. A core challenge is learning policies in simulation that can be deployed in the real world, thereby overcoming the sim-to-real gap. In this work, we bridge the visual sim-to-real gap with an image-based reinforcement learning pipeline based on pixel-level domain adaptation and demonstrate its effectiveness on an image-based task in deformable object manipulation. We choose a tissue retraction task because of its importance in clinical reality of precise cancer surgery. After training in simulation on domain-translated images, our policy requires no retraining to perform tissue retraction with a 50% success rate on the real robotic system using raw RGB images. Furthermore, our sim-to-real transfer method makes no assumptions on the task itself and requires no paired images. This work introduces the first successful application of visual sim-to-real transfer for robotic manipulation of deformable objects in the surgical field, which represents a notable step towards the clinical translation of cognitive surgical robotics.
Read more6/11/2024