Sim-To-Real Transfer for Visual Reinforcement Learning of Deformable Object Manipulation for Robot-Assisted Surgery

0
🔄
Sign in to get full access
Overview
- Reinforcement learning can help surgeons by automating low-level control tasks, allowing them to focus on high-level decision making.
- Applying reinforcement learning in the real world is challenging due to the "sim-to-real gap" - the difference between simulation and reality.
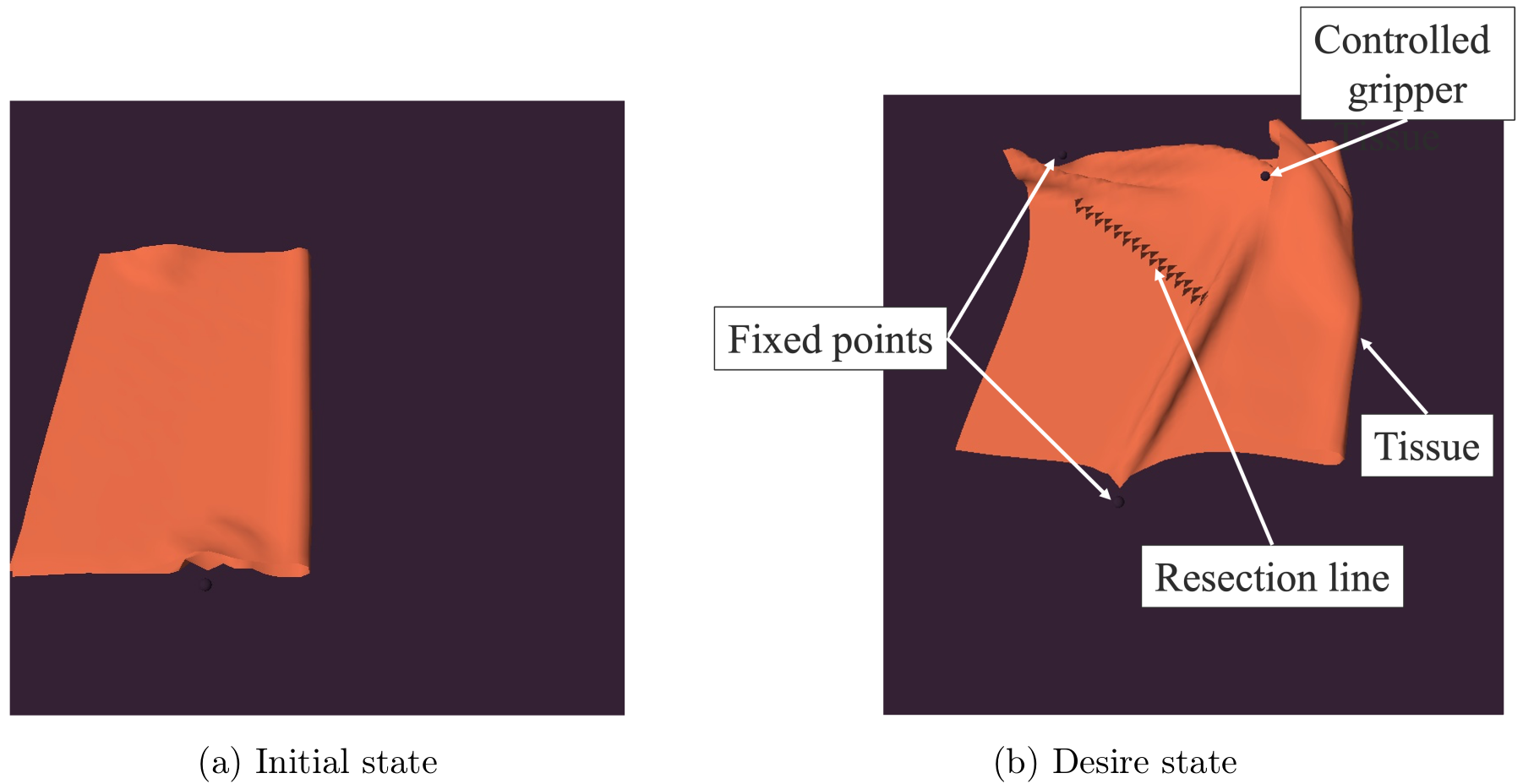
- This paper presents a method to bridge the visual sim-to-real gap for robotic manipulation of deformable objects, using a tissue retraction task as an example.
Plain English Explanation
Robotic systems have the potential to assist surgeons by taking over the detailed control tasks, freeing up the surgeon's mental energy to focus on higher-level decision making. Reinforcement learning is a machine learning technique that has shown promise in learning complex control policies, especially when tested in simulation environments where many samples can be collected cheaply.
However, a key challenge is transferring these learned policies from simulation to the real world - the "sim-to-real gap." This paper presents a method to bridge that visual sim-to-real gap using an image-based reinforcement learning pipeline that adapts the simulated images to look more like the real world.
The researchers tested their method on a tissue retraction task, which is important for precise cancer surgery. After training in simulation on these domain-adapted images, the policy was able to perform the tissue retraction task successfully on the real robotic system without any further training. Importantly, this method does not make any assumptions about the task itself and does not require paired images between simulation and reality.
This work represents an important step towards bringing cognitive surgical robotics to the clinic, by showing how reinforcement learning can be applied to manipulate deformable objects like tissue in a real-world robotic system.
Technical Explanation
The paper presents an image-based reinforcement learning pipeline to bridge the visual sim-to-real gap for robotic manipulation of deformable objects, using a tissue retraction task as an example.
The key components are:
-
Simulation environment: The researchers developed a soft contact simulation environment to train the reinforcement learning agent on the tissue retraction task.
-
Domain adaptation: To address the visual differences between the simulation and real world, the researchers used pixel-level domain adaptation to translate the simulated images to look more like real-world RGB images.
-
Reinforcement learning: The reinforcement learning agent was trained in the adapted simulation environment to learn a policy for performing the tissue retraction task.
-
Real-world deployment: After training, the policy was directly deployed on the real robotic system using raw RGB images, without any additional fine-tuning or retraining.
The results show that the trained policy was able to perform tissue retraction with a 50% success rate on the real system, demonstrating the effectiveness of the sim-to-real transfer method. Importantly, this method does not make any assumptions about the task itself and requires no paired images between simulation and reality.
Critical Analysis
The paper presents a promising approach to bridging the visual sim-to-real gap for robotic manipulation of deformable objects. However, there are a few caveats and limitations worth considering:
-
The 50% success rate on the real system, while a notable achievement, still leaves room for improvement. Further research is needed to understand the factors limiting the policy's performance in the real world.
-
The paper does not provide a detailed analysis of the types of failures or errors encountered during real-world deployment. Understanding these failure modes could help guide future improvements to the approach.
-
The tissue retraction task, while clinically relevant, is relatively simple compared to the full range of surgical tasks. Extending this approach to more complex manipulations of deformable tissues would be an important next step.
-
The paper does not address the potential safety and reliability concerns that would need to be addressed before deploying such a system in a real surgical setting. Rigorous testing and validation would be crucial.
Despite these limitations, this work represents an important step towards the clinical translation of cognitive surgical robotics. The ability to transfer learned policies from simulation to the real world, without the need for extensive retraining, could significantly accelerate the development and deployment of intelligent surgical assistants.
Conclusion
This paper presents a novel approach to bridging the visual sim-to-real gap for robotic manipulation of deformable objects, using a tissue retraction task as a case study. By combining pixel-level domain adaptation and reinforcement learning, the researchers were able to train a policy in simulation that could be successfully deployed on a real robotic system without any additional training.
This work represents an important step towards the clinical translation of cognitive surgical robotics, where intelligent robotic systems can assist surgeons by automating low-level control tasks and allowing them to focus on higher-level decision making. Further research is needed to improve the reliability and safety of these systems, but the results demonstrated in this paper are a promising foundation for future development.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔄
0
Sim-To-Real Transfer for Visual Reinforcement Learning of Deformable Object Manipulation for Robot-Assisted Surgery
Paul Maria Scheikl, Eleonora Tagliabue, Bal'azs Gyenes, Martin Wagner, Diego Dall'Alba, Paolo Fiorini, Franziska Mathis-Ullrich
Automation holds the potential to assist surgeons in robotic interventions, shifting their mental work load from visuomotor control to high level decision making. Reinforcement learning has shown promising results in learning complex visuomotor policies, especially in simulation environments where many samples can be collected at low cost. A core challenge is learning policies in simulation that can be deployed in the real world, thereby overcoming the sim-to-real gap. In this work, we bridge the visual sim-to-real gap with an image-based reinforcement learning pipeline based on pixel-level domain adaptation and demonstrate its effectiveness on an image-based task in deformable object manipulation. We choose a tissue retraction task because of its importance in clinical reality of precise cancer surgery. After training in simulation on domain-translated images, our policy requires no retraining to perform tissue retraction with a 50% success rate on the real robotic system using raw RGB images. Furthermore, our sim-to-real transfer method makes no assumptions on the task itself and requires no paired images. This work introduces the first successful application of visual sim-to-real transfer for robotic manipulation of deformable objects in the surgical field, which represents a notable step towards the clinical translation of cognitive surgical robotics.
Read more6/11/2024
0
Embedded Image-to-Image Translation for Efficient Sim-to-Real Transfer in Learning-based Robot-Assisted Soft Manipulation
Jacinto Colan, Keisuke Sugita, Ana Davila, Yutaro Yamada, Yasuhisa Hasegawa
Recent advances in robotic learning in simulation have shown impressive results in accelerating learning complex manipulation skills. However, the sim-to-real gap, caused by discrepancies between simulation and reality, poses significant challenges for the effective deployment of autonomous surgical systems. We propose a novel approach utilizing image translation models to mitigate domain mismatches and facilitate efficient robot skill learning in a simulated environment. Our method involves the use of contrastive unpaired Image-to-image translation, allowing for the acquisition of embedded representations from these transformed images. Subsequently, these embeddings are used to improve the efficiency of training surgical manipulation models. We conducted experiments to evaluate the performance of our approach, demonstrating that it significantly enhances task success rates and reduces the steps required for task completion compared to traditional methods. The results indicate that our proposed system effectively bridges the sim-to-real gap, providing a robust framework for advancing the autonomy of surgical robots in minimally invasive procedures.
Read more9/17/2024

0
Toward a Surgeon-in-the-Loop Ophthalmic Robotic Apprentice using Reinforcement and Imitation Learning
Amr Gomaa, Bilal Mahdy, Niko Kleer, Antonio Kruger
Robot-assisted surgical systems have demonstrated significant potential in enhancing surgical precision and minimizing human errors. However, existing systems cannot accommodate individual surgeons' unique preferences and requirements. Additionally, they primarily focus on general surgeries (e.g., laparoscopy) and are unsuitable for highly precise microsurgeries, such as ophthalmic procedures. Thus, we propose an image-guided approach for surgeon-centered autonomous agents that can adapt to the individual surgeon's skill level and preferred surgical techniques during ophthalmic cataract surgery. Our approach trains reinforcement and imitation learning agents simultaneously using curriculum learning approaches guided by image data to perform all tasks of the incision phase of cataract surgery. By integrating the surgeon's actions and preferences into the training process, our approach enables the robot to implicitly learn and adapt to the individual surgeon's unique techniques through surgeon-in-the-loop demonstrations. This results in a more intuitive and personalized surgical experience for the surgeon while ensuring consistent performance for the autonomous robotic apprentice. We define and evaluate the effectiveness of our approach in a simulated environment using our proposed metrics and highlight the trade-off between a generic agent and a surgeon-centered adapted agent. Finally, our approach has the potential to extend to other ophthalmic and microsurgical procedures, opening the door to a new generation of surgeon-in-the-loop autonomous surgical robots. We provide an open-source simulation framework for future development and reproducibility at https://github.com/amrgomaaelhady/CataractAdaptSurgRobot.
Read more8/13/2024
0
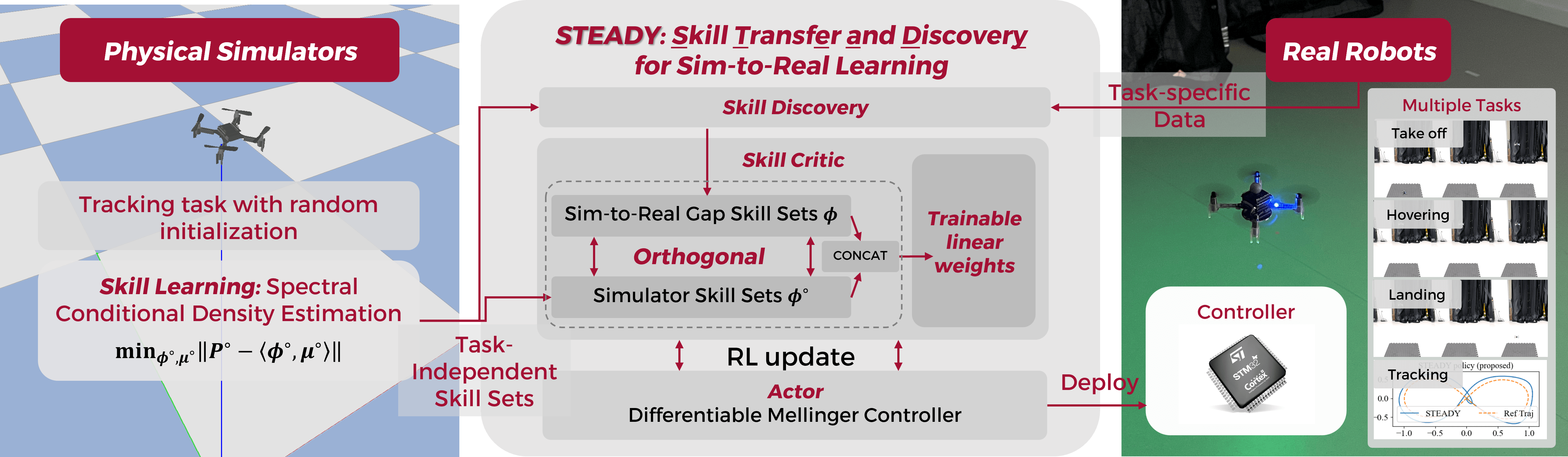
Skill Transfer and Discovery for Sim-to-Real Learning: A Representation-Based Viewpoint
Haitong Ma, Zhaolin Ren, Bo Dai, Na Li
We study sim-to-real skill transfer and discovery in the context of robotics control using representation learning. We draw inspiration from spectral decomposition of Markov decision processes. The spectral decomposition brings about representation that can linearly represent the state-action value function induced by any policies, thus can be regarded as skills. The skill representations are transferable across arbitrary tasks with the same transition dynamics. Moreover, to handle the sim-to-real gap in the dynamics, we propose a skill discovery algorithm that learns new skills caused by the sim-to-real gap from real-world data. We promote the discovery of new skills by enforcing orthogonal constraints between the skills to learn and the skills from simulators, and then synthesize the policy using the enlarged skill sets. We demonstrate our methodology by transferring quadrotor controllers from simulators to Crazyflie 2.1 quadrotors. We show that we can learn the skill representations from a single simulator task and transfer these to multiple different real-world tasks including hovering, taking off, landing and trajectory tracking. Our skill discovery approach helps narrow the sim-to-real gap and improve the real-world controller performance by up to 30.2%.
Read more4/9/2024