Real-World Data Inspired Interactive Connected Traffic Scenario Generation

0

Sign in to get full access
Overview
- Presents a framework for simulating and evaluating vehicle-to-everything (V2X) communication systems
- Focuses on developing a realistic simulation environment that captures the complexity of real-world traffic scenarios
- Aims to enable more effective testing and validation of autonomous vehicle technologies that rely on V2X communication
Plain English Explanation
This research paper describes a framework for simulating and evaluating vehicle-to-everything (V2X) communication systems. The goal is to create a realistic simulation environment that can capture the complexity of real-world traffic scenarios. This is important because many autonomous vehicle technologies rely on V2X communication, which allows vehicles to exchange information with each other and with infrastructure like traffic signals.
By developing a more realistic simulation, the researchers hope to enable more effective testing and validation of these autonomous vehicle technologies. The simulation can be used to explore how V2X systems perform under different conditions, such as varying levels of traffic, weather, or network connectivity. This can help identify potential issues or vulnerabilities before deploying these technologies in the real world.
Technical Explanation
The paper introduces a framework for simulating and evaluating V2X communication systems. The framework is designed to capture the complexity of real-world traffic scenarios, including factors like vehicle movements, traffic signals, and environmental conditions.
The simulation architecture includes several key components:
- Traffic Simulation: Generates realistic vehicle movements and traffic patterns based on real-world data
- V2X Communication Simulation: Simulates the exchange of information between vehicles, infrastructure, and other entities
- Scenario Editor: Allows users to define and customize traffic scenarios for testing and evaluation
The researchers validate the simulation framework by comparing its outputs to real-world data, demonstrating its ability to accurately represent complex traffic dynamics. They then use the framework to evaluate the performance of V2X-enabled autonomous vehicle technologies in various scenarios, such as emergency braking and cooperative lane merging.
Critical Analysis
The paper acknowledges some limitations of the simulation framework, such as the challenges of accurately modeling human driver behavior and the need for further validation against real-world data. The researchers also note that the framework currently focuses on vehicle-centric scenarios and may need to be expanded to include other road users, such as pedestrians and cyclists, for a more comprehensive assessment of V2X systems.
While the simulation framework represents a significant advancement in the field of V2X research, there may be concerns about the generalizability of the findings. The paper does not fully address how the framework could be adapted to different geographic regions or transportation systems, which could have implications for the applicability of the research.
Conclusion
This research paper presents a novel framework for simulating and evaluating V2X communication systems, with the goal of enabling more effective testing and validation of autonomous vehicle technologies. By creating a realistic simulation environment that captures the complexity of real-world traffic scenarios, the researchers have provided a valuable tool for researchers and developers working in this field.
The simulation framework has the potential to significantly advance the development and deployment of V2X-enabled autonomous vehicles, which could have important implications for improving transportation safety and efficiency. However, the research also highlights the need for continued refinement and validation of the simulation model, as well as further exploration of its applicability in diverse transportation contexts.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Real-World Data Inspired Interactive Connected Traffic Scenario Generation
Junwei You, Pei Li, Yang Cheng, Keshu Wu, Rui Gan, Steven T. Parker, Bin Ran
Simulation is a crucial step in ensuring accurate, efficient, and realistic Connected and Autonomous Vehicles (CAVs) testing and validation. As the adoption of CAV accelerates, the integration of real-world data into simulation environments becomes increasingly critical. Among various technologies utilized by CAVs, Vehicle-to-Everything (V2X) communication plays a crucial role in ensuring a seamless transmission of information between CAVs, infrastructure, and other road users. However, most existing studies have focused on developing and testing communication protocols, resource allocation strategies, and data dissemination techniques in V2X. There is a gap where real-world V2X data is integrated into simulations to generate diverse and high-fidelity traffic scenarios. To fulfill this research gap, we leverage real-world Signal Phase and Timing (SPaT) data from Roadside Units (RSUs) to enhance the fidelity of CAV simulations. Moreover, we developed an algorithm that enables Autonomous Vehicles (AVs) to respond dynamically to real-time traffic signal data, simulating realistic V2X communication scenarios. Such high-fidelity simulation environments can generate multimodal data, including trajectory, semantic camera, depth camera, and bird's eye view data for various traffic scenarios. The generated scenarios and data provide invaluable insights into AVs' interactions with traffic infrastructure and other road users. This work aims to bridge the gap between theoretical research and practical deployment of CAVs, facilitating the development of smarter and safer transportation systems.
Read more9/27/2024

0
TRAVERSE: Traffic-Responsive Autonomous Vehicle Experience & Rare-event Simulation for Enhanced safety
Sandeep Thalapanane, Sandip Sharan Senthil Kumar, Guru Nandhan Appiya Dilipkumar Peethambari, Sourang SriHari, Laura Zheng, Julio Poveda, Ming C. Lin
Data for training learning-enabled self-driving cars in the physical world are typically collected in a safe, normal environment. Such data distribution often engenders a strong bias towards safe driving, making self-driving cars unprepared when encountering adversarial scenarios like unexpected accidents. Due to a dearth of such adverse data that is unrealistic for drivers to collect, autonomous vehicles can perform poorly when experiencing such rare events. This work addresses much-needed research by having participants drive a VR vehicle simulator going through simulated traffic with various types of accidental scenarios. It aims to understand human responses and behaviors in simulated accidents, contributing to our understanding of driving dynamics and safety. The simulation framework adopts a robust traffic simulation and is rendered using the Unity Game Engine. Furthermore, the simulation framework is built with portable, light-weight immersive driving simulator hardware, lowering the resource barrier for studies in autonomous driving research. Keywords: Rare Events, Traffic Simulation, Autonomous Driving, Virtual Reality, User Studies
Read more7/15/2024
🏅
0
Diagnosing and Predicting Autonomous Vehicle Operational Safety Using Multiple Simulation Modalities and a Virtual Environment
Joe Beck, Shean Huff, Subhadeep Chakraborty
Even as technology and performance gains are made in the sphere of automated driving, safety concerns remain. Vehicle simulation has long been seen as a tool to overcome the cost associated with a massive amount of on-road testing for development and discovery of safety critical edge-cases. However, purely software-based vehicle models may leave a large realism gap between their real-world counterparts in terms of dynamic response, and highly realistic vehicle-in-the-loop (VIL) simulations that encapsulate a virtual world around a physical vehicle may still be quite expensive to produce and similarly time intensive as on-road testing. In this work, we demonstrate an AV simulation test bed that combines the realism of vehicle-in-the-loop (VIL) simulation with the ease of implementation of model-in-the-loop (MIL) simulation. The setup demonstrated in this work allows for response diagnosis for the VIL simulations. By observing causal links between virtual weather and lighting conditions that surround the virtual depiction of our vehicle, the vision-based perception model and controller of Openpilot, and the dynamic response of our physical vehicle under test, we can draw conclusions regarding how the perceived environment contributed to vehicle response. Conversely, we also demonstrate response prediction for the MIL setup, where the need for a physical vehicle is not required to draw richer conclusions around the impact of environmental conditions on AV performance than could be obtained with VIL simulation alone. These combine for a simulation setup with accurate real-world implications for edge-case discovery that is both cost effective and time efficient to implement.
Read more5/14/2024
0
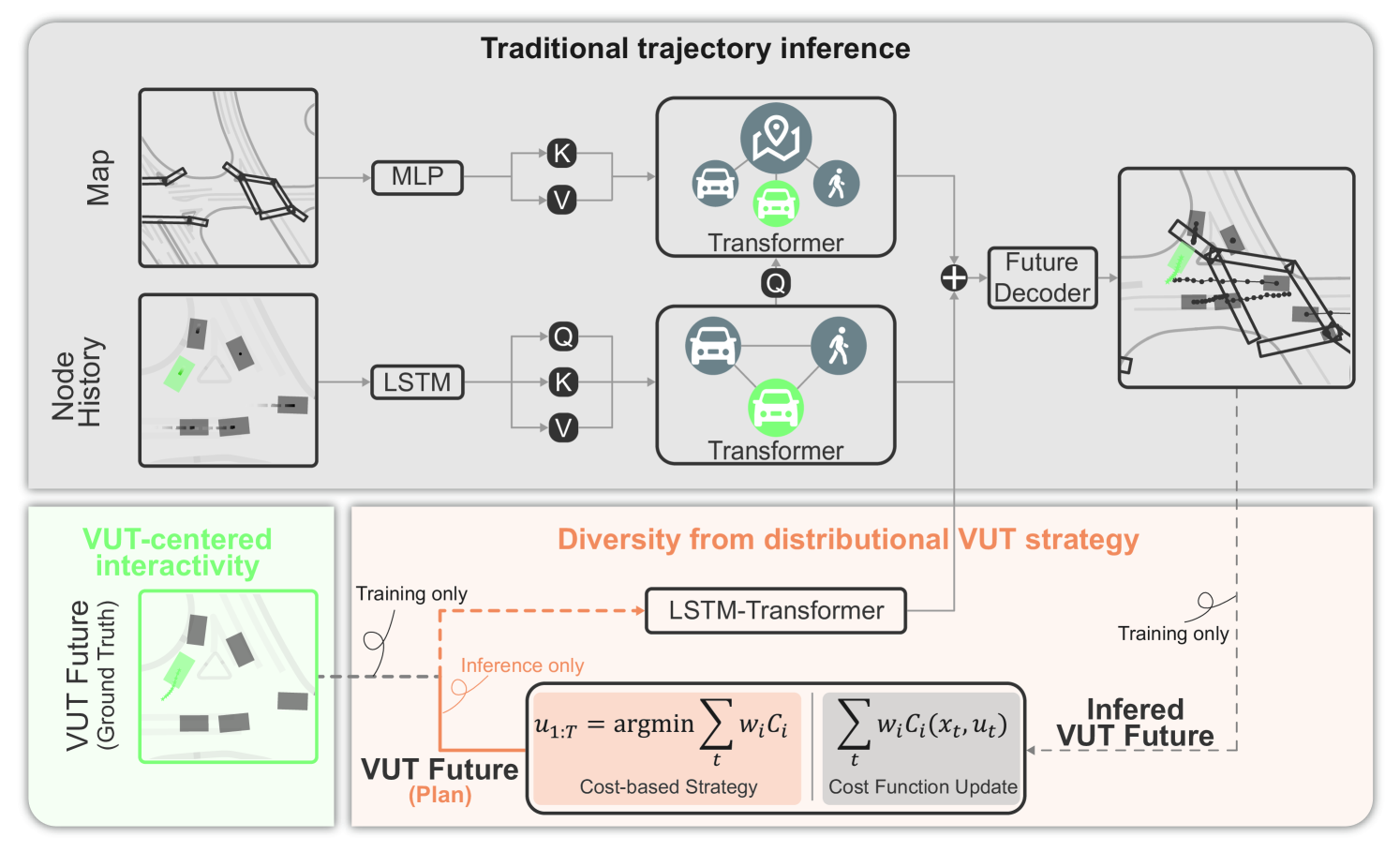
Towards Interactive Autonomous Vehicle Testing: Vehicle-Under-Test-Centered Traffic Simulation
Yiru Liu, Xiaocong Zhao, Jian Sun
The simulation-based testing is essential for safely implementing autonomous vehicles (AV) on roads, necessitating simulated traffic environments that dynamically interact with the Vehicle Under Test (VUT). This study introduces a VUT-Centered environmental Dynamics Inference (VCDI) model for realistic, interactive, and diverse background traffic simulation. Serving the purpose of AV testing, VCDI employs Transformer-based modules in a conditional trajectory inference framework to simulate VUT-centered driving interaction events. First, the VUT future motion is taken as an augmented model input to bridge the action dependence between VUT and background objects. Second, to enrich the scenario diversity, a Gaussian-distributional cost function module is designed to capture the uncertainty of the VUT's strategy, triggering various scenario evolution. Experimental results validate VCDI's trajectory-level simulation precision which outperforms the state-of-the-art trajectory prediction work. The flexibility of the distributional cost function allows VCDI to provide diverse-yet-realistic scenarios for AV testing. We demonstrate such capability by modifying the anticipation to the VUT's cost-based strategy and thus achieve multiple testing scenarios with explainable background traffic evolution. Codes are available at https://github.com/YNYSNL/VCDI.
Read more7/29/2024