TRAVERSE: Traffic-Responsive Autonomous Vehicle Experience & Rare-event Simulation for Enhanced safety

0

Sign in to get full access
Overview
- Presents a novel simulation framework called TRAVERSE (Traffic-Responsive Autonomous Vehicle Experience & Rare-event Simulation for Enhanced safety)
- Focuses on improving the safety of autonomous vehicles through better training and testing in rare and challenging traffic scenarios
- Combines real-world data, virtual environments, and advanced simulation techniques to create a comprehensive platform for AV development and evaluation
Plain English Explanation
The paper introduces a new simulation framework called TRAVERSE that aims to enhance the safety of autonomous vehicles (AVs). The key idea is to go beyond standard testing in regular traffic conditions and instead focus on rare and challenging scenarios that AVs may encounter in the real world.
To achieve this, TRAVERSE combines real-world data from sensors and traffic monitoring systems with advanced virtual environments and simulation techniques. This allows AV developers to create highly realistic and customizable scenarios, including rare events like accidents, severe weather, or unusual driver behavior. By training and testing AVs in these challenging situations, the researchers hope to identify potential weaknesses and improve the vehicles' ability to handle unexpected situations safely.
The SAFE-SIM and Metaverse Safer Roadways papers present complementary approaches to creating safe and realistic simulation environments for AV development. The Dynamically Expanding Capacity and Evaluating VR System works also investigate techniques for capturing and analyzing near-miss events to further improve AV safety.
By combining comprehensive simulation, real-world data, and advanced analytics, the TRAVERSE framework aims to accelerate the development of safer and more capable autonomous vehicles, which could have significant implications for transportation safety and the future of mobility.
Technical Explanation
The TRAVERSE framework consists of several key components:
-
Data Acquisition: The system collects real-world traffic data from various sources, including sensors, cameras, and vehicle telematics. This data is used to construct accurate models of traffic patterns, driver behavior, and environmental conditions.
-
Simulation Environment: TRAVERSE leverages the Approach to Systematic Data Acquisition to create highly detailed and customizable virtual environments. These simulations can faithfully reproduce real-world traffic scenarios, including rare events and challenging conditions.
-
Autonomous Vehicle Modeling: The framework incorporates detailed models of autonomous vehicle sensors, decision-making algorithms, and control systems. This allows for comprehensive testing and evaluation of AV performance in the virtual environment.
-
Rare Event Simulation: A key focus of TRAVERSE is the simulation of rare and safety-critical events, such as accidents, weather-related incidents, and unusual driver behaviors. These scenarios are generated using advanced techniques like importance sampling and Markov Chain Monte Carlo methods to ensure adequate coverage of the event space.
-
Analytics and Insights: The system collects extensive data on AV behavior, decision-making, and performance during the simulations. Advanced analytics and visualization tools are used to identify potential weaknesses, assess safety metrics, and guide further development and testing.
By combining these elements, the TRAVERSE framework provides a comprehensive platform for the development, testing, and evaluation of autonomous vehicles. This approach aims to accelerate the deployment of safer and more capable AVs, with the potential to significantly improve transportation safety and accessibility.
Critical Analysis
The TRAVERSE framework represents a significant advancement in AV simulation and testing, addressing some of the key challenges faced by the industry. By focusing on rare and safety-critical events, the system can help identify edge cases and corner cases that may not be adequately covered by standard testing procedures.
However, the paper does acknowledge several limitations and areas for further research:
-
Fidelity of Simulation: While the virtual environments aim to be highly realistic, there may still be discrepancies between the simulated scenarios and real-world conditions. Ongoing efforts to improve sensor modeling, traffic simulation, and environmental representation will be crucial for ensuring the validity of the test results.
-
Validation and Generalization: The researchers emphasize the need for robust validation of the TRAVERSE framework, both in terms of the simulation accuracy and the ability of the system to generalize to real-world situations. Extensive testing and comparison with real-world data will be necessary to build confidence in the system's capabilities.
-
Ethical and Regulatory Considerations: The use of rare and safety-critical event simulation raises important ethical and regulatory questions, particularly around the potential impact on public perception and acceptance of autonomous vehicles. The paper acknowledges the need for careful consideration of these issues as the technology develops.
-
Scalability and Computational Demands: Implementing the TRAVERSE framework may require significant computational resources, especially for large-scale simulations and advanced analytics. Ongoing research into efficient algorithms and hardware optimization will be crucial for making the system scalable and practical for widespread deployment.
Overall, the TRAVERSE framework represents a promising approach to improving the safety and performance of autonomous vehicles. By addressing the limitations and challenges identified in the paper, future research and development in this area could have a significant impact on the future of transportation and mobility.
Conclusion
The TRAVERSE framework presented in this paper offers a novel and comprehensive approach to enhancing the safety of autonomous vehicles. By combining real-world data, advanced virtual environments, and sophisticated simulation techniques, the system aims to identify and address rare and safety-critical scenarios that may not be adequately covered by standard testing procedures.
This work builds upon and complements other recent advancements in AV simulation, such as the SAFE-SIM and Metaverse Safer Roadways projects, as well as efforts to capture and analyze near-miss events, as seen in the Dynamically Expanding Capacity and Evaluating VR System works.
By addressing the key limitations and challenges identified in the critical analysis, the TRAVERSE framework has the potential to significantly accelerate the development and deployment of safer and more capable autonomous vehicles. This could have far-reaching implications for transportation safety, accessibility, and the broader transformation of mobility in the years to come.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
TRAVERSE: Traffic-Responsive Autonomous Vehicle Experience & Rare-event Simulation for Enhanced safety
Sandeep Thalapanane, Sandip Sharan Senthil Kumar, Guru Nandhan Appiya Dilipkumar Peethambari, Sourang SriHari, Laura Zheng, Julio Poveda, Ming C. Lin
Data for training learning-enabled self-driving cars in the physical world are typically collected in a safe, normal environment. Such data distribution often engenders a strong bias towards safe driving, making self-driving cars unprepared when encountering adversarial scenarios like unexpected accidents. Due to a dearth of such adverse data that is unrealistic for drivers to collect, autonomous vehicles can perform poorly when experiencing such rare events. This work addresses much-needed research by having participants drive a VR vehicle simulator going through simulated traffic with various types of accidental scenarios. It aims to understand human responses and behaviors in simulated accidents, contributing to our understanding of driving dynamics and safety. The simulation framework adopts a robust traffic simulation and is rendered using the Unity Game Engine. Furthermore, the simulation framework is built with portable, light-weight immersive driving simulator hardware, lowering the resource barrier for studies in autonomous driving research. Keywords: Rare Events, Traffic Simulation, Autonomous Driving, Virtual Reality, User Studies
Read more7/15/2024
0
An Approach to Systematic Data Acquisition and Data-Driven Simulation for the Safety Testing of Automated Driving Functions
Leon Eisemann, Mirjam Fehling-Kaschek, Henrik Gommel, David Hermann, Marvin Klemp, Martin Lauer, Benjamin Lickert, Florian Luettner, Robin Moss, Nicole Neis, Maria Pohle, Simon Romanski, Daniel Stadler, Alexander Stolz, Jens Ziehn, Jingxing Zhou
With growing complexity and criticality of automated driving functions in road traffic and their operational design domains (ODD), there is increasing demand for covering significant proportions of development, validation, and verification in virtual environments and through simulation models. If, however, simulations are meant not only to augment real-world experiments, but to replace them, quantitative approaches are required that measure to what degree and under which preconditions simulation models adequately represent reality, and thus, using their results accordingly. Especially in R&D areas related to the safety impact of the open world, there is a significant shortage of real-world data to parameterize and/or validate simulations - especially with respect to the behavior of human traffic participants, whom automated driving functions will meet in mixed traffic. We present an approach to systematically acquire data in public traffic by heterogeneous means, transform it into a unified representation, and use it to automatically parameterize traffic behavior models for use in data-driven virtual validation of automated driving functions.
Read more5/6/2024
0
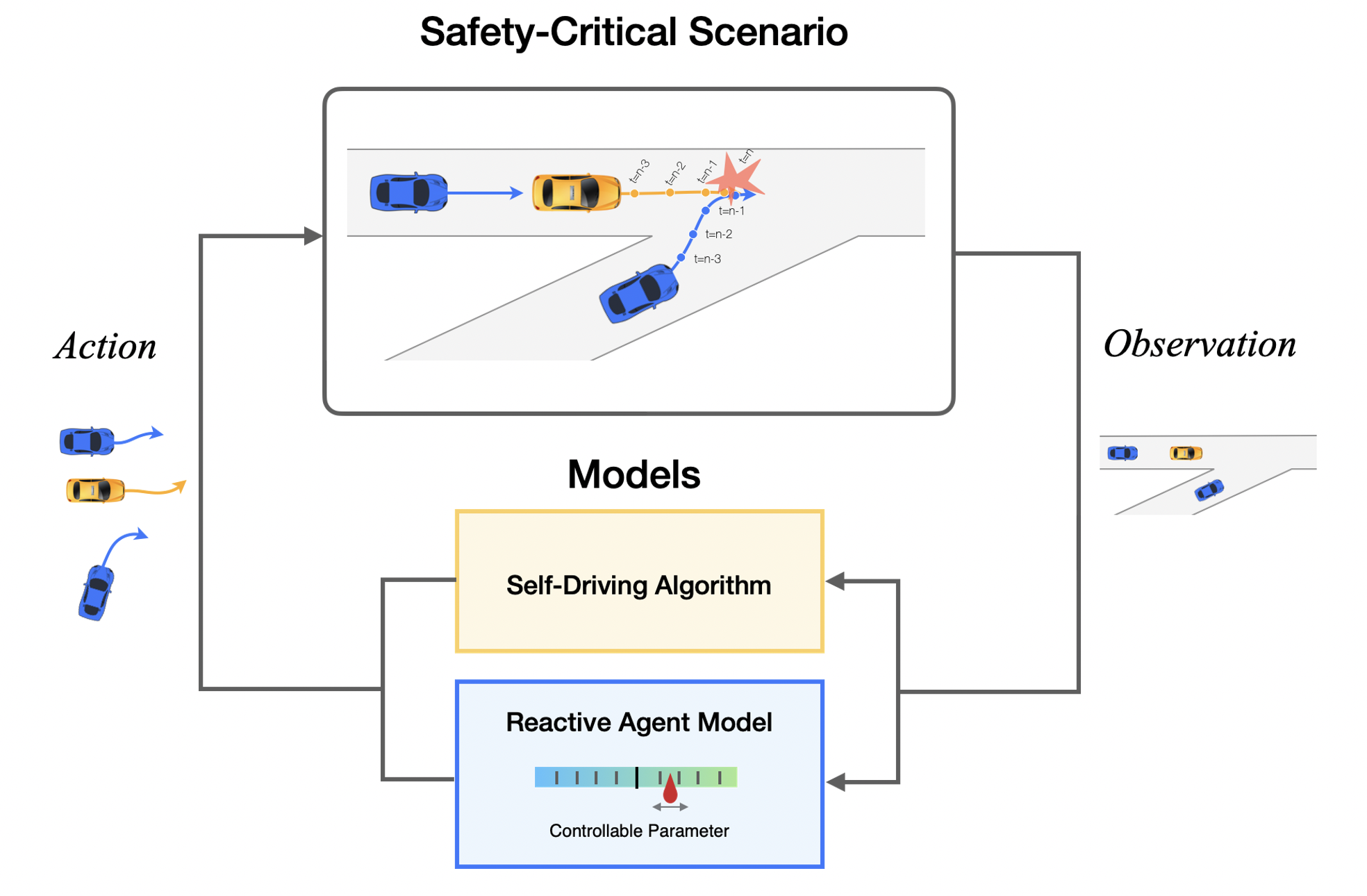
SAFE-SIM: Safety-Critical Closed-Loop Traffic Simulation with Controllable Adversaries
Wei-Jer Chang, Francesco Pittaluga, Masayoshi Tomizuka, Wei Zhan, Manmohan Chandraker
Evaluating the performance of autonomous vehicle planning algorithms necessitates simulating long-tail safety-critical traffic scenarios. However, traditional methods for generating such scenarios often fall short in terms of controllability and realism; they also neglect the dynamics of agent interactions. To address these limitations, we introduce SAFE-SIM, a novel diffusion-based controllable closed-loop safety-critical simulation framework. Our approach yields two distinct advantages: 1) generating realistic long-tail safety-critical scenarios that closely reflect real-world conditions, and 2) providing controllable adversarial behavior for more comprehensive and interactive evaluations. We develop a novel approach to simulate safety-critical scenarios through an adversarial term in the denoising process of diffusion models, which allows an adversarial agent to challenge a planner with plausible maneuvers while all agents in the scene exhibit reactive and realistic behaviors. Furthermore, we propose novel guidance objectives and a partial diffusion process that enables users to control key aspects of the scenarios, such as the collision type and aggressiveness of the adversarial agent, while maintaining the realism of the behavior. We validate our framework empirically using the nuScenes and nuPlan datasets across multiple planners, demonstrating improvements in both realism and controllability. These findings affirm that diffusion models provide a robust and versatile foundation for safety-critical, interactive traffic simulation, extending their utility across the broader autonomous driving landscape. Project website: https://safe-sim.github.io/.
Read more8/9/2024

0
Metaverse for Safer Roadways: An Immersive Digital Twin Framework for Exploring Human-Autonomy Coexistence in Urban Transportation Systems
Tanmay Vilas Samak, Chinmay Vilas Samak, Venkat Narayan Krovi
Societal-scale deployment of autonomous vehicles requires them to coexist with human drivers, necessitating mutual understanding and coordination among these entities. However, purely real-world or simulation-based experiments cannot be employed to explore such complex interactions due to safety and reliability concerns, respectively. Consequently, this work presents an immersive digital twin framework to explore and experiment with the interaction dynamics between autonomous and non-autonomous traffic participants. Particularly, we employ a mixed-reality human-machine interface to allow human drivers and autonomous agents to observe and interact with each other for testing edge-case scenarios while ensuring safety at all times. To validate the versatility of the proposed framework's modular architecture, we first present a discussion on a set of user experience experiments encompassing 4 different levels of immersion with 4 distinct user interfaces. We then present a case study of uncontrolled intersection traversal to demonstrate the efficacy of the proposed framework in validating the interactions of a primary human-driven, autonomous, and connected autonomous vehicle with a secondary semi-autonomous vehicle. The proposed framework has been openly released to guide the future of autonomy-oriented digital twins and research on human-autonomy coexistence.
Read more9/11/2024