Reconstruction and Simulation of Elastic Objects with Spring-Mass 3D Gaussians

0
Sign in to get full access
Overview
- This paper presents a method for reconstructing and simulating elastic objects using a spring-mass model and 3D Gaussians.
- The approach aims to capture the deformable nature of objects like cloth, skin, and other soft materials.
- The method involves using a spring-mass system to model the object's underlying structure and 3D Gaussian distributions to represent the surface.
Plain English Explanation
This research describes a way to recreate and animate flexible, deformable objects like cloth or skin using a combination of spring-mass systems and 3D Gaussian distributions. The spring-mass system acts as a kind of internal "skeleton" that gives the object structure and allows it to bend and twist. The 3D Gaussians are then used to model the object's surface, capturing its soft, malleable nature.
The spring-mass system provides a framework for simulating how the object will move and deform over time, while the 3D Gaussians are used to smoothly represent the object's changing shape. This allows the researchers to create realistic animations of flexible objects like clothing or skin that can bend, stretch, and move in a natural way.
Overall, this approach aims to provide a practical way to model and simulate the complex behavior of deformable objects, with potential applications in computer graphics, virtual reality, and other areas where realistic, dynamic 3D models are needed.
Technical Explanation
The key aspects of this paper's approach include:
-
Spring-Mass System: The researchers use a spring-mass system to model the underlying structure of the elastic object. This system consists of a network of interconnected nodes (representing mass points) and springs (representing the connections between them). As the object deforms, the spring-mass system simulates how the internal forces and stresses change over time.
-
3D Gaussians: To represent the object's surface, the researchers employ 3D Gaussian distributions. These Gaussians are centered on the nodes in the spring-mass system and their parameters (mean and covariance) are updated as the object deforms. This allows the surface to smoothly conform to the changing shape of the underlying structure.
-
Reconstruction and Simulation: The method starts by reconstructing the initial 3D shape of the object from sensor data, such as depth images or point clouds. This reconstruction process uses the 3D Gaussians to model the surface. Once the initial state is established, the spring-mass system is used to simulate the object's dynamic behavior over time, with the 3D Gaussians updating to match the changing shape.
The researchers evaluate their approach on several benchmark datasets, demonstrating its ability to accurately reconstruct and simulate the deformation of various elastic objects, including clothing, skin, and other deformable materials.
Critical Analysis
The paper presents a well-designed and thorough approach to modeling and simulating elastic objects using a combination of spring-mass systems and 3D Gaussians. The researchers have demonstrated the effectiveness of their method on several benchmark datasets, which is a strength of the work.
However, the paper does not address some potential limitations of the approach. For example, the spring-mass system may struggle to capture the complex, non-linear behavior of some materials, and the 3D Gaussians may not be able to fully represent the intricate details of certain surfaces. Additionally, the computational cost of the simulation may be a concern for real-time applications, especially for large or complex objects.
Further research could explore alternative representations, such as implicit meshes or per-Gaussian embedding, to improve the accuracy and efficiency of the model. Incorporating machine learning techniques, such as dense visual SLAM with 3D Gaussians, could also be a promising avenue for future work.
Conclusion
This paper presents a novel approach to reconstructing and simulating the dynamic behavior of elastic objects using a combination of spring-mass systems and 3D Gaussian distributions. The method aims to capture the deformable nature of materials like cloth, skin, and other soft objects, with potential applications in computer graphics, virtual reality, and beyond.
The key strengths of the approach include its ability to accurately reconstruct initial object shapes and realistically simulate their deformation over time. While the paper does not address all potential limitations, it represents a significant advancement in the field of deformable object modeling and simulation, and the techniques described could inspire future research in this area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Reconstruction and Simulation of Elastic Objects with Spring-Mass 3D Gaussians
Licheng Zhong, Hong-Xing Yu, Jiajun Wu, Yunzhu Li
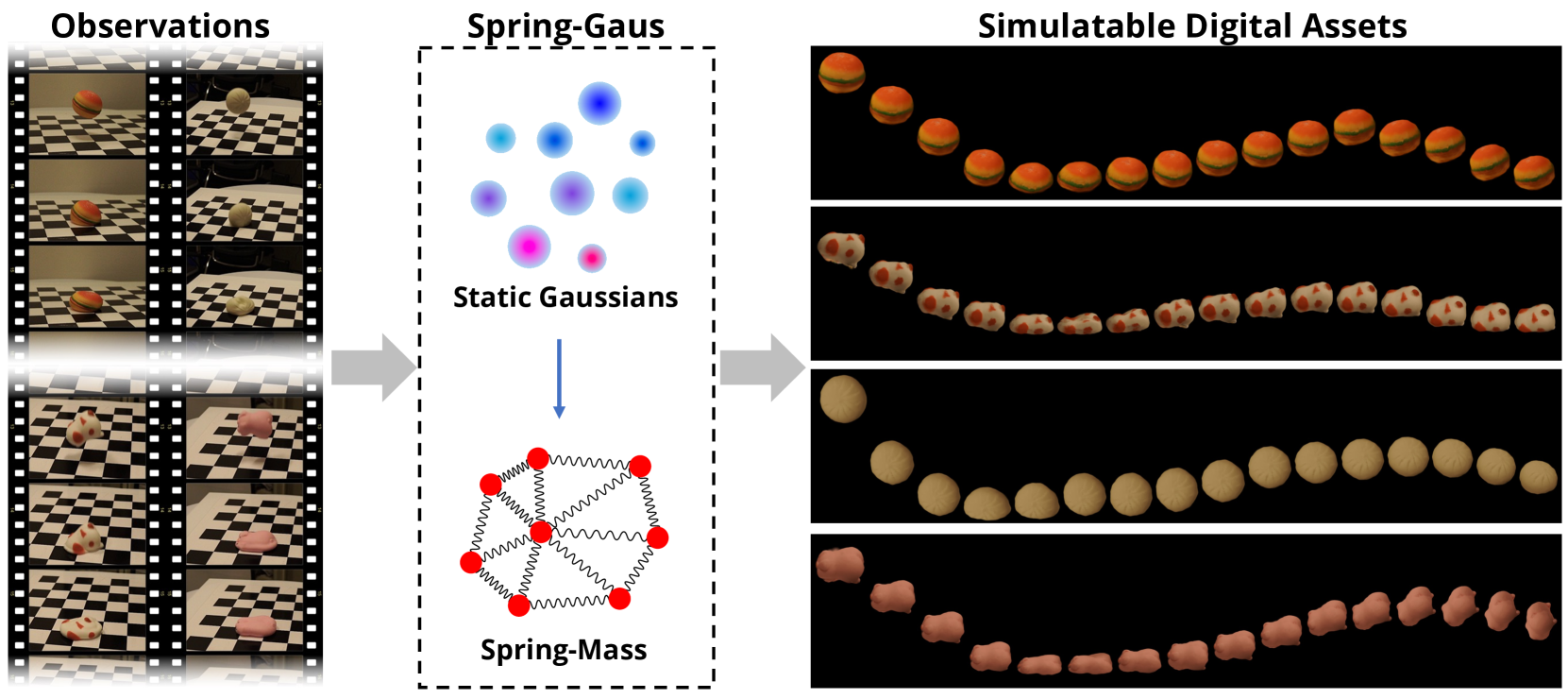
Reconstructing and simulating elastic objects from visual observations is crucial for applications in computer vision and robotics. Existing methods, such as 3D Gaussians, model 3D appearance and geometry, but lack the ability to estimate physical properties for objects and simulate them. The core challenge lies in integrating an expressive yet efficient physical dynamics model. We propose Spring-Gaus, a 3D physical object representation for reconstructing and simulating elastic objects from videos of the object from multiple viewpoints. In particular, we develop and integrate a 3D Spring-Mass model into 3D Gaussian kernels, enabling the reconstruction of the visual appearance, shape, and physical dynamics of the object. Our approach enables future prediction and simulation under various initial states and environmental properties. We evaluate Spring-Gaus on both synthetic and real-world datasets, demonstrating accurate reconstruction and simulation of elastic objects. Project page: https://zlicheng.com/spring_gaus/.
Read more7/22/2024

0
Physics3D: Learning Physical Properties of 3D Gaussians via Video Diffusion
Fangfu Liu, Hanyang Wang, Shunyu Yao, Shengjun Zhang, Jie Zhou, Yueqi Duan
In recent years, there has been rapid development in 3D generation models, opening up new possibilities for applications such as simulating the dynamic movements of 3D objects and customizing their behaviors. However, current 3D generative models tend to focus only on surface features such as color and shape, neglecting the inherent physical properties that govern the behavior of objects in the real world. To accurately simulate physics-aligned dynamics, it is essential to predict the physical properties of materials and incorporate them into the behavior prediction process. Nonetheless, predicting the diverse materials of real-world objects is still challenging due to the complex nature of their physical attributes. In this paper, we propose textbf{Physics3D}, a novel method for learning various physical properties of 3D objects through a video diffusion model. Our approach involves designing a highly generalizable physical simulation system based on a viscoelastic material model, which enables us to simulate a wide range of materials with high-fidelity capabilities. Moreover, we distill the physical priors from a video diffusion model that contains more understanding of realistic object materials. Extensive experiments demonstrate the effectiveness of our method with both elastic and plastic materials. Physics3D shows great potential for bridging the gap between the physical world and virtual neural space, providing a better integration and application of realistic physical principles in virtual environments. Project page: https://liuff19.github.io/Physics3D.
Read more6/12/2024
0
Efficient Data-driven Scene Simulation using Robotic Surgery Videos via Physics-embedded 3D Gaussians
Zhenya Yang, Kai Chen, Yonghao Long, Qi Dou
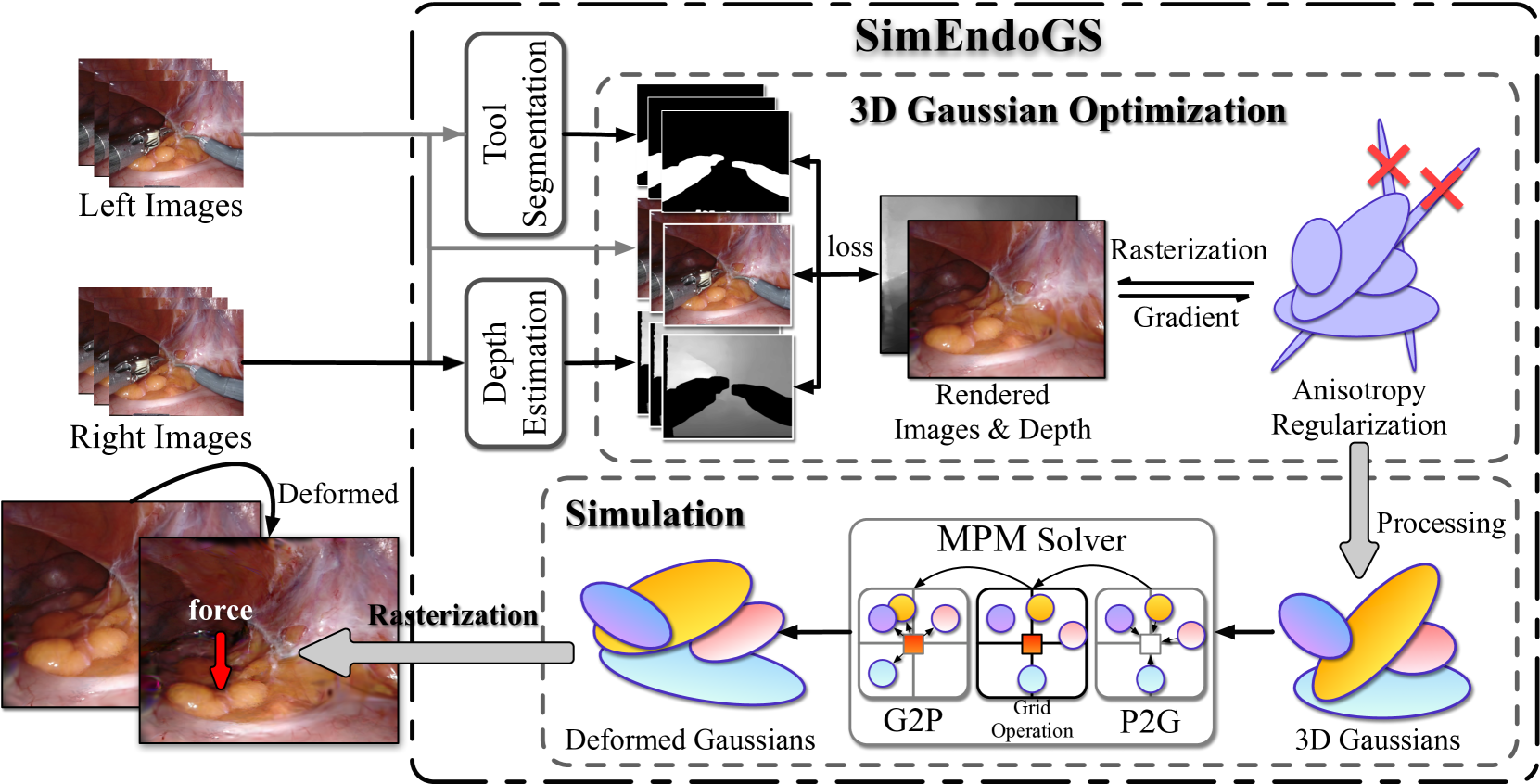
Surgical scene simulation plays a crucial role in surgical education and simulator-based robot learning. Traditional approaches for creating these environments with surgical scene involve a labor-intensive process where designers hand-craft tissues models with textures and geometries for soft body simulations. This manual approach is not only time-consuming but also limited in the scalability and realism. In contrast, data-driven simulation offers a compelling alternative. It has the potential to automatically reconstruct 3D surgical scenes from real-world surgical video data, followed by the application of soft body physics. This area, however, is relatively uncharted. In our research, we introduce 3D Gaussian as a learnable representation for surgical scene, which is learned from stereo endoscopic video. To prevent over-fitting and ensure the geometrical correctness of these scenes, we incorporate depth supervision and anisotropy regularization into the Gaussian learning process. Furthermore, we apply the Material Point Method, which is integrated with physical properties, to the 3D Gaussians to achieve realistic scene deformations. Our method was evaluated on our collected in-house and public surgical videos datasets. Results show that it can reconstruct and simulate surgical scenes from endoscopic videos efficiently-taking only a few minutes to reconstruct the surgical scene-and produce both visually and physically plausible deformations at a speed approaching real-time. The results demonstrate great potential of our proposed method to enhance the efficiency and variety of simulations available for surgical education and robot learning.
Read more8/7/2024
📈
0
PhysGaussian: Physics-Integrated 3D Gaussians for Generative Dynamics
Tianyi Xie, Zeshun Zong, Yuxing Qiu, Xuan Li, Yutao Feng, Yin Yang, Chenfanfu Jiang
We introduce PhysGaussian, a new method that seamlessly integrates physically grounded Newtonian dynamics within 3D Gaussians to achieve high-quality novel motion synthesis. Employing a custom Material Point Method (MPM), our approach enriches 3D Gaussian kernels with physically meaningful kinematic deformation and mechanical stress attributes, all evolved in line with continuum mechanics principles. A defining characteristic of our method is the seamless integration between physical simulation and visual rendering: both components utilize the same 3D Gaussian kernels as their discrete representations. This negates the necessity for triangle/tetrahedron meshing, marching cubes, cage meshes, or any other geometry embedding, highlighting the principle of what you see is what you simulate (WS$^2$). Our method demonstrates exceptional versatility across a wide variety of materials--including elastic entities, metals, non-Newtonian fluids, and granular materials--showcasing its strong capabilities in creating diverse visual content with novel viewpoints and movements. Our project page is at: https://xpandora.github.io/PhysGaussian/
Read more4/16/2024