Reduced-Order Neural Operators: Learning Lagrangian Dynamics on Highly Sparse Graphs

0

Sign in to get full access
Overview
- This paper presents a reduced-order neural operator framework for learning Lagrangian dynamics on highly sparse graphs.
- It introduces a novel approach to modeling complex, high-dimensional physical systems using a neural network architecture.
- The framework aims to capture the essential dynamics of the system while significantly reducing the number of input variables required.
Plain English Explanation
The paper describes a new way to model the behavior of complex physical systems using machine learning. Physical systems can often be represented as a network or "graph" of interconnected components, where the interactions between the components drive the overall dynamics of the system.
<a href="https://aimodels.fyi/papers/arxiv/learning-coarse-grained-dynamics-graph">Traditional approaches</a> to modeling these systems often require detailed information about every component and their connections. However, in many real-world scenarios, this level of detail is not available or practical to measure.
The key insight of this research is that you can still capture the essential dynamics of a system by focusing on a smaller, "reduced-order" set of the most important components and connections. This is achieved using a specialized neural network architecture that can learn the underlying Lagrangian dynamics (the mathematical principles governing the motion) from this highly sparse, incomplete information about the system.
The advantage of this approach is that it can provide accurate predictions of the system's behavior while requiring far less input data than traditional methods. This makes it well-suited for modeling complex phenomena in fields like engineering, physics, and materials science, where complete information about a system may be difficult or expensive to obtain.
Technical Explanation
The paper introduces a "Reduced-Order Neural Operator" (RONO) framework for learning Lagrangian dynamics on highly sparse graphs. The core idea is to use a neural network to capture the essential dynamics of a physical system, even when detailed information about the system's components and connections is limited.
The architecture consists of several key components:
- A "graph encoder" that takes the sparse graph representation of the system as input and learns a latent representation of the important features and interactions.
- A "Lagrangian dynamics predictor" that uses this latent representation to predict the future state of the system according to Lagrangian mechanics.
- A "decoder" that maps the predicted future state back to the original graph representation.
The authors demonstrate the effectiveness of the RONO framework on several benchmark physical simulation tasks, showing that it can achieve accurate predictions using far fewer input variables than traditional approaches. This highlights the power of the reduced-order modeling approach to capture the essential dynamics of complex systems from limited data.
Critical Analysis
The paper presents a promising new technique for modeling physical systems using machine learning. The key strengths are the ability to learn accurate dynamics from highly sparse input data and the principled grounding in Lagrangian mechanics.
However, the authors acknowledge some limitations and areas for further research:
- The framework currently assumes the system can be represented as a fixed, static graph. Extending it to handle dynamically changing graph structures could broaden its applicability.
- The experiments focus on relatively simple physical systems. Applying the RONO approach to more complex, high-dimensional real-world systems would be an important next step.
- The interpretability of the learned dynamics model is not extensively explored. Developing techniques to extract physical insights from the neural network could enhance the scientific value of this approach.
Overall, this work represents an interesting step forward in bridging the gap between machine learning and physics-based modeling. Continued research in this direction could yield powerful new tools for understanding and simulating complex physical phenomena.
Conclusion
The Reduced-Order Neural Operator framework introduced in this paper offers a novel approach to modeling the dynamics of physical systems using machine learning. By focusing on the most important components and connections in a system, the RONO model can accurately predict the system's behavior while requiring far less input data than traditional methods.
This reduced-order modeling technique has the potential to significantly improve our ability to simulate and understand complex physical phenomena in fields ranging from engineering to materials science. As the authors demonstrate, the RONO framework is a promising step towards bridging the gap between data-driven machine learning and first-principles physics-based modeling.
With further research to address the current limitations, this work could lead to transformative advances in how we model and reason about the physical world around us.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Reduced-Order Neural Operators: Learning Lagrangian Dynamics on Highly Sparse Graphs
Hrishikesh Viswanath, Yue Chang, Julius Berner, Peter Yichen Chen, Aniket Bera
We present a neural operator architecture to simulate Lagrangian dynamics, such as fluid flow, granular flows, and elastoplasticity. Traditional numerical methods, such as the finite element method (FEM), suffer from long run times and large memory consumption. On the other hand, approaches based on graph neural networks are faster but still suffer from long computation times on dense graphs, which are often required for high-fidelity simulations. Our model, GIOROM or Graph Interaction Operator for Reduced-Order Modeling, learns temporal dynamics within a reduced-order setting, capturing spatial features from a highly sparse graph representation of the input and generalizing to arbitrary spatial locations during inference. The model is geometry-aware and discretization-agnostic and can generalize to different initial conditions, velocities, and geometries after training. We show that point clouds of the order of 100,000 points can be inferred from sparse graphs with $sim$1000 points, with negligible change in computation time. We empirically evaluate our model on elastic solids, Newtonian fluids, Non-Newtonian fluids, Drucker-Prager granular flows, and von Mises elastoplasticity. On these benchmarks, our approach results in a 25$times$ speedup compared to other neural network-based physics simulators while delivering high-fidelity predictions of complex physical systems and showing better performance on most benchmarks. The code and the demos are provided at https://github.com/HrishikeshVish/GIOROM.
Read more7/8/2024
🧠
0
A hybrid numerical methodology coupling Reduced Order Modeling and Graph Neural Networks for non-parametric geometries: applications to structural dynamics problems
Victor Matray (LMPS), Faisal Amlani (LMPS), Fr'ed'eric Feyel (LMPS), David N'eron (LMPS)
This work introduces a new approach for accelerating the numerical analysis of time-domain partial differential equations (PDEs) governing complex physical systems. The methodology is based on a combination of a classical reduced-order modeling (ROM) framework and recently-introduced Graph Neural Networks (GNNs), where the latter is trained on highly heterogeneous databases of varying numerical discretization sizes. The proposed techniques are shown to be particularly suitable for non-parametric geometries, ultimately enabling the treatment of a diverse range of geometries and topologies. Performance studies are presented in an application context related to the design of aircraft seats and their corresponding mechanical responses to shocks, where the main motivation is to reduce the computational burden and enable the rapid design iteration for such problems that entail non-parametric geometries. The methods proposed here are straightforwardly applicable to other scientific or engineering problems requiring a large number of finite element-based numerical simulations, with the potential to significantly enhance efficiency while maintaining reasonable accuracy.
Read more6/6/2024

0
Decomposing heterogeneous dynamical systems with graph neural networks
C'edric Allier, Magdalena C. Schneider, Michael Innerberger, Larissa Heinrich, John A. Bogovic, Stephan Saalfeld
Natural physical, chemical, and biological dynamical systems are often complex, with heterogeneous components interacting in diverse ways. We show that graph neural networks can be designed to jointly learn the interaction rules and the structure of the heterogeneity from data alone. The learned latent structure and dynamics can be used to virtually decompose the complex system which is necessary to parameterize and infer the underlying governing equations. We tested the approach with simulation experiments of moving particles and vector fields that interact with each other. While our current aim is to better understand and validate the approach with simulated data, we anticipate it to become a generally applicable tool to uncover the governing rules underlying complex dynamics observed in nature.
Read more7/30/2024
0
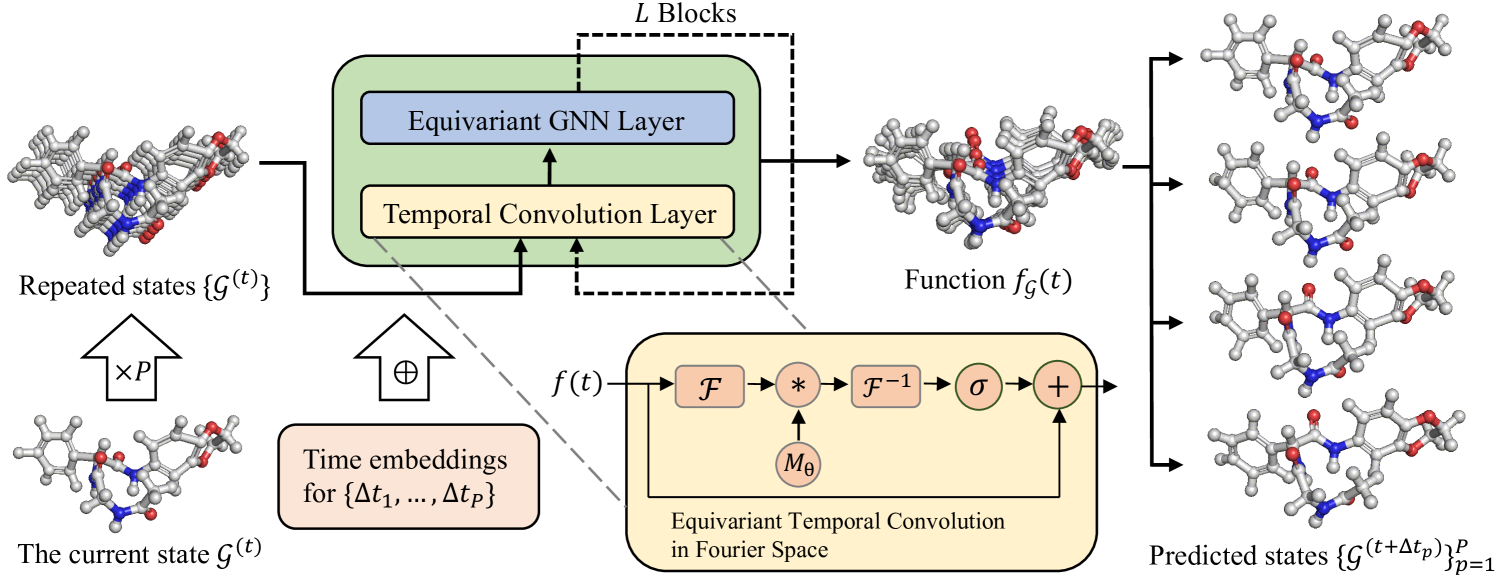
Equivariant Graph Neural Operator for Modeling 3D Dynamics
Minkai Xu, Jiaqi Han, Aaron Lou, Jean Kossaifi, Arvind Ramanathan, Kamyar Azizzadenesheli, Jure Leskovec, Stefano Ermon, Anima Anandkumar
Modeling the complex three-dimensional (3D) dynamics of relational systems is an important problem in the natural sciences, with applications ranging from molecular simulations to particle mechanics. Machine learning methods have achieved good success by learning graph neural networks to model spatial interactions. However, these approaches do not faithfully capture temporal correlations since they only model next-step predictions. In this work, we propose Equivariant Graph Neural Operator (EGNO), a novel and principled method that directly models dynamics as trajectories instead of just next-step prediction. Different from existing methods, EGNO explicitly learns the temporal evolution of 3D dynamics where we formulate the dynamics as a function over time and learn neural operators to approximate it. To capture the temporal correlations while keeping the intrinsic SE(3)-equivariance, we develop equivariant temporal convolutions parameterized in the Fourier space and build EGNO by stacking the Fourier layers over equivariant networks. EGNO is the first operator learning framework that is capable of modeling solution dynamics functions over time while retaining 3D equivariance. Comprehensive experiments in multiple domains, including particle simulations, human motion capture, and molecular dynamics, demonstrate the significantly superior performance of EGNO against existing methods, thanks to the equivariant temporal modeling. Our code is available at https://github.com/MinkaiXu/egno.
Read more6/4/2024