Replay Consolidation with Label Propagation for Continual Object Detection

0
Sign in to get full access
Overview
- This paper proposes a novel continual object detection framework called Replay Consolidation with Label Propagation (RCLP).
- RCLP addresses the problem of learning new object classes while preserving performance on previously learned classes in a continual learning setting.
- The key ideas are to consolidate a replay buffer of exemplars and propagate labels to unlabeled samples to improve model performance.
Plain English Explanation
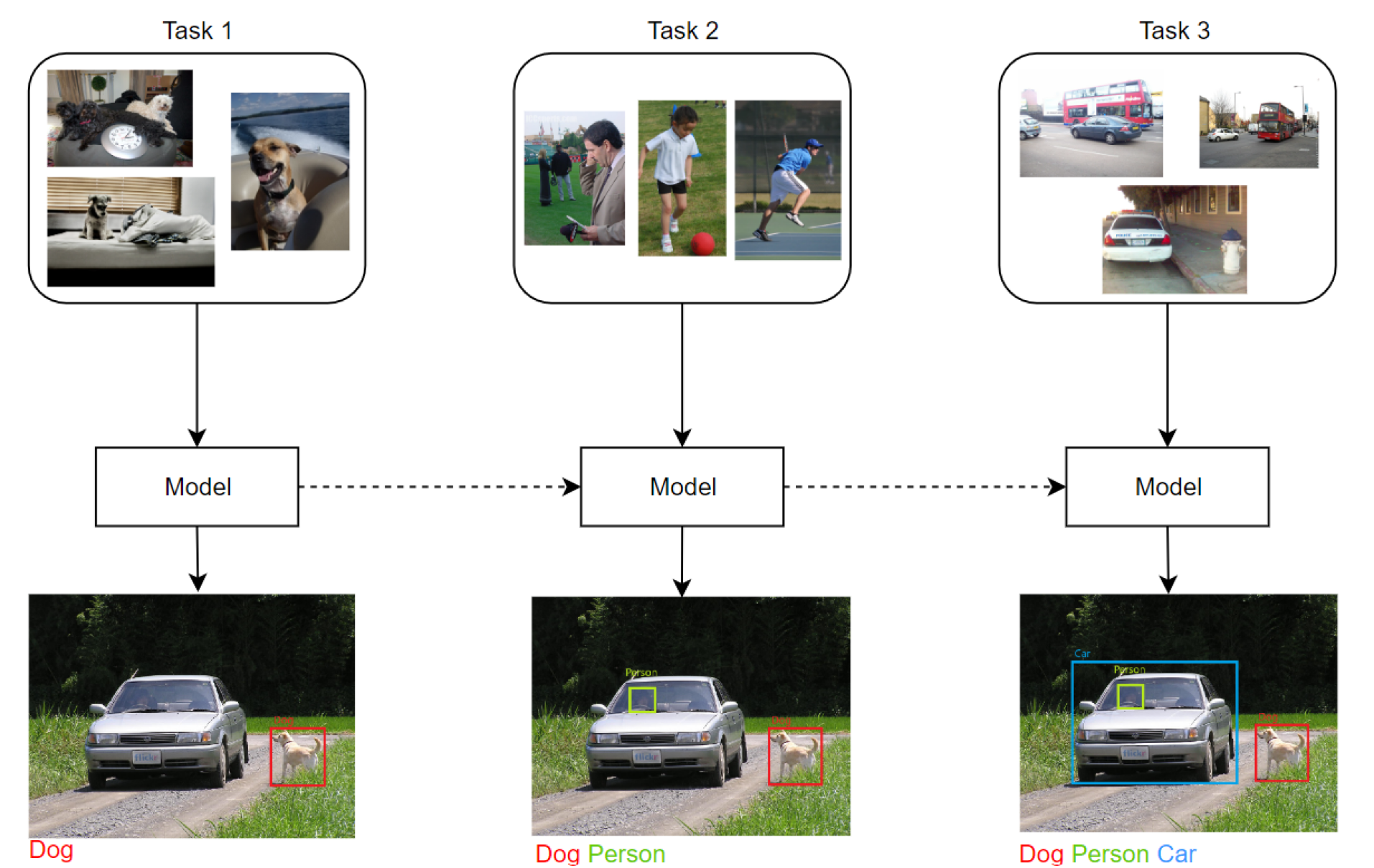
Continual learning is the ability of AI models to continuously learn new information without forgetting what they've learned before. This is an important capability for real-world applications like object detection, where the model needs to recognize new objects that are introduced over time.
The Replay Consolidation with Label Propagation (RCLP) framework proposed in this paper aims to address this challenge for object detection models. The key ideas are:
-
Replay Buffer Consolidation: The model maintains a "replay buffer" - a small set of exemplar images from past tasks. As the model learns new tasks, it consolidates the replay buffer to retain the most informative examples.
-
Label Propagation: The model uses the labeled examples in the replay buffer to automatically label additional unlabeled images. This helps the model learn more efficiently from the limited labeled data available in each new task.
By consolidating the replay buffer and propagating labels, the RCLP framework allows the object detection model to continuously learn new classes while preserving its performance on previously learned classes. This makes the model more robust and adaptable to real-world scenarios where the set of objects it needs to detect is constantly evolving.
Technical Explanation
The Replay Consolidation with Label Propagation (RCLP) framework consists of three key components:
-
Replay Buffer Consolidation: The model maintains a replay buffer of exemplar images from past tasks. As new tasks are learned, the buffer is consolidated to retain the most informative examples using a differentiable clustering-based approach.
-
Label Propagation: The model uses the labeled examples in the replay buffer to automatically label additional unlabeled images from the current task. This is done by training a separate label propagation network that learns to propagate labels from the exemplars to the unlabeled samples.
-
Continual Object Detection: The object detection model is trained in a continual learning setting, where it learns new tasks sequentially. The consolidated replay buffer and propagated labels are used to regularize the model and prevent catastrophic forgetting of previously learned classes.
The authors evaluate RCLP on several continual learning benchmarks for object detection, including MS-COCO and Pascal-VOC. The results demonstrate that RCLP outperforms state-of-the-art continual learning methods for object detection, achieving higher overall performance and better preservation of performance on past tasks.
Critical Analysis
The Replay Consolidation with Label Propagation (RCLP) framework presents a promising approach to continual object detection, but there are a few potential limitations and areas for further research:
-
Computational Complexity: The label propagation network adds additional computational overhead, which may be a concern for real-time applications or resource-constrained environments like edge devices. Further optimizations may be needed to reduce the model's complexity.
-
Generalization to Novel Classes: The paper focuses on continually learning new classes that are related to the initial set of classes. It's unclear how well the approach would generalize to learning completely novel and unrelated classes, which is a common challenge in real-world scenarios.
-
Scalability to Larger Datasets: The experiments were conducted on relatively small-scale object detection datasets like MS-COCO and Pascal-VOC. Evaluating the approach on larger and more diverse datasets would provide further insights into its scalability and robustness.
-
Interpretability: The paper does not delve into the interpretability of the learned models, which is an important consideration for real-world deployment and user trust. Incorporating interpretability mechanisms could enhance the RCLP framework's transparency and usability.
Overall, the Replay Consolidation with Label Propagation (RCLP) framework represents a valuable contribution to the field of continual learning for object detection. The ideas of replay buffer consolidation and label propagation are promising and could inspire further research into efficient and robust continual learning solutions.
Conclusion
The Replay Consolidation with Label Propagation (RCLP) framework proposed in this paper addresses the challenge of continual learning for object detection. By consolidating a replay buffer of exemplars and propagating labels to unlabeled samples, RCLP enables object detection models to continuously learn new classes while preserving performance on previously learned classes.
The results demonstrate the effectiveness of this approach, with RCLP outperforming state-of-the-art continual learning methods for object detection. While there are some potential limitations and areas for further research, the core ideas behind RCLP are a significant step forward in developing more adaptable and robust object detection systems for real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Replay Consolidation with Label Propagation for Continual Object Detection
Riccardo De Monte, Davide Dalle Pezze, Marina Ceccon, Francesco Pasti, Francesco Paissan, Elisabetta Farella, Gian Antonio Susto, Nicola Bellotto
Object Detection is a highly relevant computer vision problem with many applications such as robotics and autonomous driving. Continual Learning~(CL) considers a setting where a model incrementally learns new information while retaining previously acquired knowledge. This is particularly challenging since Deep Learning models tend to catastrophically forget old knowledge while training on new data. In particular, Continual Learning for Object Detection~(CLOD) poses additional difficulties compared to CL for Classification. In CLOD, images from previous tasks may contain unknown classes that could reappear labeled in future tasks. These missing annotations cause task interference issues for replay-based approaches. As a result, most works in the literature have focused on distillation-based approaches. However, these approaches are effective only when there is a strong overlap of classes across tasks. To address the issues of current methodologies, we propose a novel technique to solve CLOD called Replay Consolidation with Label Propagation for Object Detection (RCLPOD). Based on the replay method, our solution avoids task interference issues by enhancing the buffer memory samples. Our method is evaluated against existing techniques in CLOD literature, demonstrating its superior performance on established benchmarks like VOC and COCO.
Read more9/10/2024

0
Latent Distillation for Continual Object Detection at the Edge
Francesco Pasti, Marina Ceccon, Davide Dalle Pezze, Francesco Paissan, Elisabetta Farella, Gian Antonio Susto, Nicola Bellotto
While numerous methods achieving remarkable performance exist in the Object Detection literature, addressing data distribution shifts remains challenging. Continual Learning (CL) offers solutions to this issue, enabling models to adapt to new data while maintaining performance on previous data. This is particularly pertinent for edge devices, common in dynamic environments like automotive and robotics. In this work, we address the memory and computation constraints of edge devices in the Continual Learning for Object Detection (CLOD) scenario. Specifically, (i) we investigate the suitability of an open-source, lightweight, and fast detector, namely NanoDet, for CLOD on edge devices, improving upon larger architectures used in the literature. Moreover, (ii) we propose a novel CL method, called Latent Distillation~(LD), that reduces the number of operations and the memory required by state-of-the-art CL approaches without significantly compromising detection performance. Our approach is validated using the well-known VOC and COCO benchmarks, reducing the distillation parameter overhead by 74% and the Floating Points Operations~(FLOPs) by 56% per model update compared to other distillation methods.
Read more9/4/2024

0
Continual Learning in the Presence of Repetition
Hamed Hemati, Lorenzo Pellegrini, Xiaotian Duan, Zixuan Zhao, Fangfang Xia, Marc Masana, Benedikt Tscheschner, Eduardo Veas, Yuxiang Zheng, Shiji Zhao, Shao-Yuan Li, Sheng-Jun Huang, Vincenzo Lomonaco, Gido M. van de Ven
Continual learning (CL) provides a framework for training models in ever-evolving environments. Although re-occurrence of previously seen objects or tasks is common in real-world problems, the concept of repetition in the data stream is not often considered in standard benchmarks for CL. Unlike with the rehearsal mechanism in buffer-based strategies, where sample repetition is controlled by the strategy, repetition in the data stream naturally stems from the environment. This report provides a summary of the CLVision challenge at CVPR 2023, which focused on the topic of repetition in class-incremental learning. The report initially outlines the challenge objective and then describes three solutions proposed by finalist teams that aim to effectively exploit the repetition in the stream to learn continually. The experimental results from the challenge highlight the effectiveness of ensemble-based solutions that employ multiple versions of similar modules, each trained on different but overlapping subsets of classes. This report underscores the transformative potential of taking a different perspective in CL by employing repetition in the data stream to foster innovative strategy design.
Read more5/8/2024
🔎
0
Incremental Object Detection with CLIP
Ziyue Huang, Yupeng He, Qingjie Liu, Yunhong Wang
In contrast to the incremental classification task, the incremental detection task is characterized by the presence of data ambiguity, as an image may have differently labeled bounding boxes across multiple continuous learning stages. This phenomenon often impairs the model's ability to effectively learn new classes. However, existing research has paid less attention to the forward compatibility of the model, which limits its suitability for incremental learning. To overcome this obstacle, we propose leveraging a visual-language model such as CLIP to generate text feature embeddings for different class sets, which enhances the feature space globally. We then employ super-classes to replace the unavailable novel classes in the early learning stage to simulate the incremental scenario. Finally, we utilize the CLIP image encoder to accurately identify potential objects. We incorporate the finely recognized detection boxes as pseudo-annotations into the training process, thereby further improving the detection performance. We evaluate our approach on various incremental learning settings using the PASCAL VOC 2007 dataset, and our approach outperforms state-of-the-art methods, particularly for recognizing the new classes.
Read more7/10/2024