Rethinking the Key Factors for the Generalization of Remote Sensing Stereo Matching Networks

0
Sign in to get full access
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Rethinking the Key Factors for the Generalization of Remote Sensing Stereo Matching Networks
Liting Jiang, Feng Wang, Wenyi Zhang, Peifeng Li, Hongjian You, Yuming Xiang
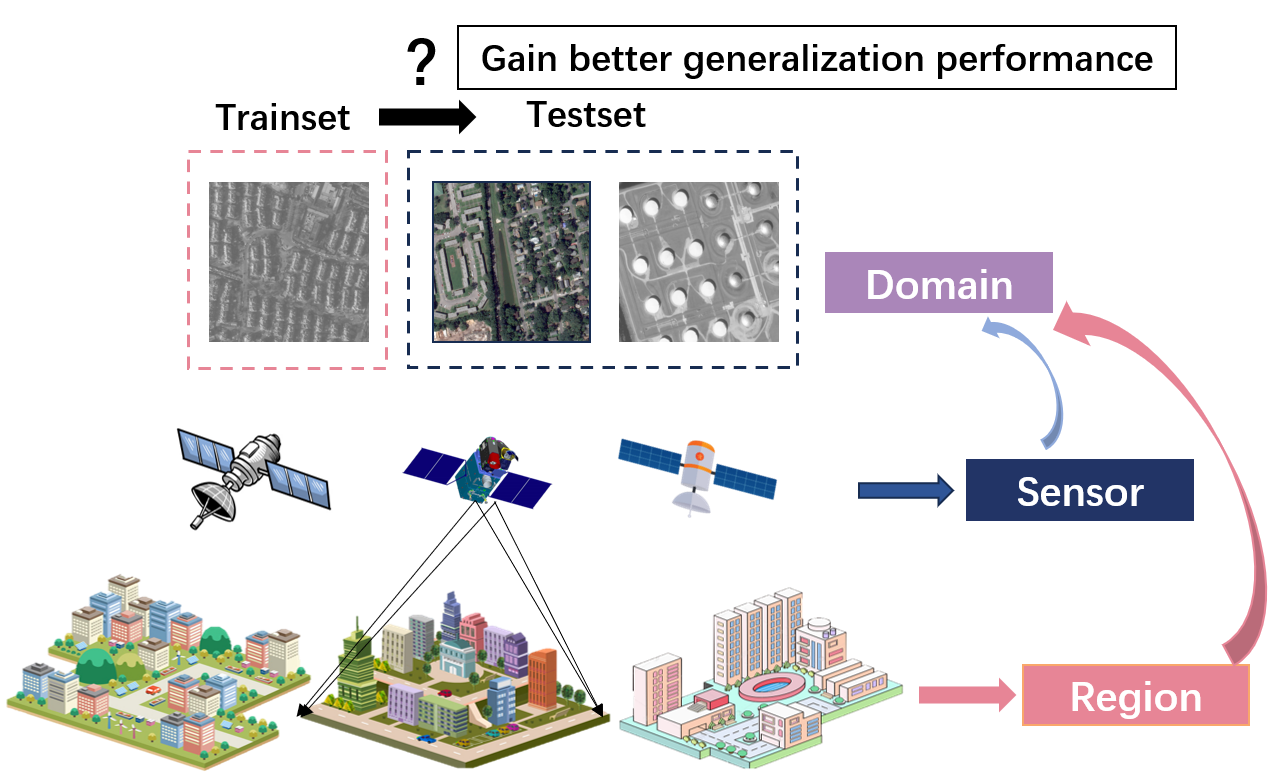
Stereo matching, a critical step of 3D reconstruction, has fully shifted towards deep learning due to its strong feature representation of remote sensing images. However, ground truth for stereo matching task relies on expensive airborne LiDAR data, thus making it difficult to obtain enough samples for supervised learning. To improve the generalization ability of stereo matching networks on cross-domain data from different sensors and scenarios, in this paper, we dedicate to study key training factors from three perspectives. (1) For the selection of training dataset, it is important to select data with similar regional target distribution as the test set instead of utilizing data from the same sensor. (2) For model structure, cascaded structure that flexibly adapts to different sizes of features is preferred. (3) For training manner, unsupervised methods generalize better than supervised methods, and we design an unsupervised early-stop strategy to help retain the best model with pre-trained weights as the basis. Extensive experiments are conducted to support the previous findings, on the basis of which we present an unsupervised stereo matching network with good generalization performance. We release the source code and the datasets at https://github.com/Elenairene/RKF_RSSM to reproduce the results and encourage future work.
Read more8/15/2024

0
Unsupervised Stereo Matching Network For VHR Remote Sensing Images Based On Error Prediction
Liting Jiang, Yuming Xiang, Feng Wang, Hongjian You
Stereo matching in remote sensing has recently garnered increased attention, primarily focusing on supervised learning. However, datasets with ground truth generated by expensive airbone Lidar exhibit limited quantity and diversity, constraining the effectiveness of supervised networks. In contrast, unsupervised learning methods can leverage the increasing availability of very-high-resolution (VHR) remote sensing images, offering considerable potential in the realm of stereo matching. Motivated by this intuition, we propose a novel unsupervised stereo matching network for VHR remote sensing images. A light-weight module to bridge confidence with predicted error is introduced to refine the core model. Robust unsupervised losses are formulated to enhance network convergence. The experimental results on US3D and WHU-Stereo datasets demonstrate that the proposed network achieves superior accuracy compared to other unsupervised networks and exhibits better generalization capabilities than supervised models. Our code will be available at https://github.com/Elenairene/CBEM.
Read more8/15/2024

0
Deep Learning Meets Satellite Images -- An Evaluation on Handcrafted and Learning-based Features for Multi-date Satellite Stereo Images
Shuang Song, Luca Morelli, Xinyi Wu, Rongjun Qin, Hessah Albanwan, Fabio Remondino
A critical step in the digital surface models(DSM) generation is feature matching. Off-track (or multi-date) satellite stereo images, in particular, can challenge the performance of feature matching due to spectral distortions between images, long baseline, and wide intersection angles. Feature matching methods have evolved over the years from handcrafted methods (e.g., SIFT) to learning-based methods (e.g., SuperPoint and SuperGlue). In this paper, we compare the performance of different features, also known as feature extraction and matching methods, applied to satellite imagery. A wide range of stereo pairs(~500) covering two separate study sites are used. SIFT, as a widely used classic feature extraction and matching algorithm, is compared with seven deep-learning matching methods: SuperGlue, LightGlue, LoFTR, ASpanFormer, DKM, GIM-LightGlue, and GIM-DKM. Results demonstrate that traditional matching methods are still competitive in this age of deep learning, although for particular scenarios learning-based methods are very promising.
Read more9/5/2024

0
A Light-weight Transformer-based Self-supervised Matching Network for Heterogeneous Images
Wang Zhang, Tingting Li, Yuntian Zhang, Gensheng Pei, Xiruo Jiang, Yazhou Yao
Matching visible and near-infrared (NIR) images remains a significant challenge in remote sensing image fusion. The nonlinear radiometric differences between heterogeneous remote sensing images make the image matching task even more difficult. Deep learning has gained substantial attention in computer vision tasks in recent years. However, many methods rely on supervised learning and necessitate large amounts of annotated data. Nevertheless, annotated data is frequently limited in the field of remote sensing image matching. To address this challenge, this paper proposes a novel keypoint descriptor approach that obtains robust feature descriptors via a self-supervised matching network. A light-weight transformer network, termed as LTFormer, is designed to generate deep-level feature descriptors. Furthermore, we implement an innovative triplet loss function, LT Loss, to enhance the matching performance further. Our approach outperforms conventional hand-crafted local feature descriptors and proves equally competitive compared to state-of-the-art deep learning-based methods, even amidst the shortage of annotated data.
Read more5/1/2024