Revisiting Constant Negative Rewards for Goal-Reaching Tasks in Robot Learning
2407.00324
0
0

Abstract
Many real-world robot learning problems, such as pick-and-place or arriving at a destination, can be seen as a problem of reaching a goal state as soon as possible. These problems, when formulated as episodic reinforcement learning tasks, can easily be specified to align well with our intended goal: -1 reward every time step with termination upon reaching the goal state, called minimum-time tasks. Despite this simplicity, such formulations are often overlooked in favor of dense rewards due to their perceived difficulty and lack of informativeness. Our studies contrast the two reward paradigms, revealing that the minimum-time task specification not only facilitates learning higher-quality policies but can also surpass dense-reward-based policies on their own performance metrics. Crucially, we also identify the goal-hit rate of the initial policy as a robust early indicator for learning success in such sparse feedback settings. Finally, using four distinct real-robotic platforms, we show that it is possible to learn pixel-based policies from scratch within two to three hours using constant negative rewards.
Create account to get full access
Overview
- This paper revisits the use of constant negative rewards for goal-reaching tasks in robot learning.
- The authors investigate the impact of using negative rewards when training robots to reach desired goals.
- They explore how this approach can affect the learning process and the eventual performance of the robots.
Plain English Explanation
The paper examines the use of negative rewards, or "punishments," when training robots to complete certain tasks. Typically, robots are trained using a system of rewards and punishments, where they are given positive rewards for actions that bring them closer to their goal, and negative rewards (or "punishments") for actions that move them further away.
The authors of this paper wanted to take a closer look at the use of constant negative rewards - meaning the robot is always given a small penalty, even when it is making progress towards its goal. They wanted to see how this approach affects the robot's learning process and its ultimate performance in reaching the desired goal.
Using negative rewards can be a way to encourage the robot to find more efficient pathways to the goal, rather than just maximizing short-term rewards. However, the authors hypothesize that too much negative reinforcement could actually hinder the robot's learning and make it more difficult to reach the goal.
Technical Explanation
The paper investigates the use of constant negative rewards in goal-reaching tasks for robot learning. The authors hypothesize that while negative rewards can encourage more efficient exploration, excessive negative reinforcement could actually impede the robot's ability to learn an effective policy for reaching the goal.
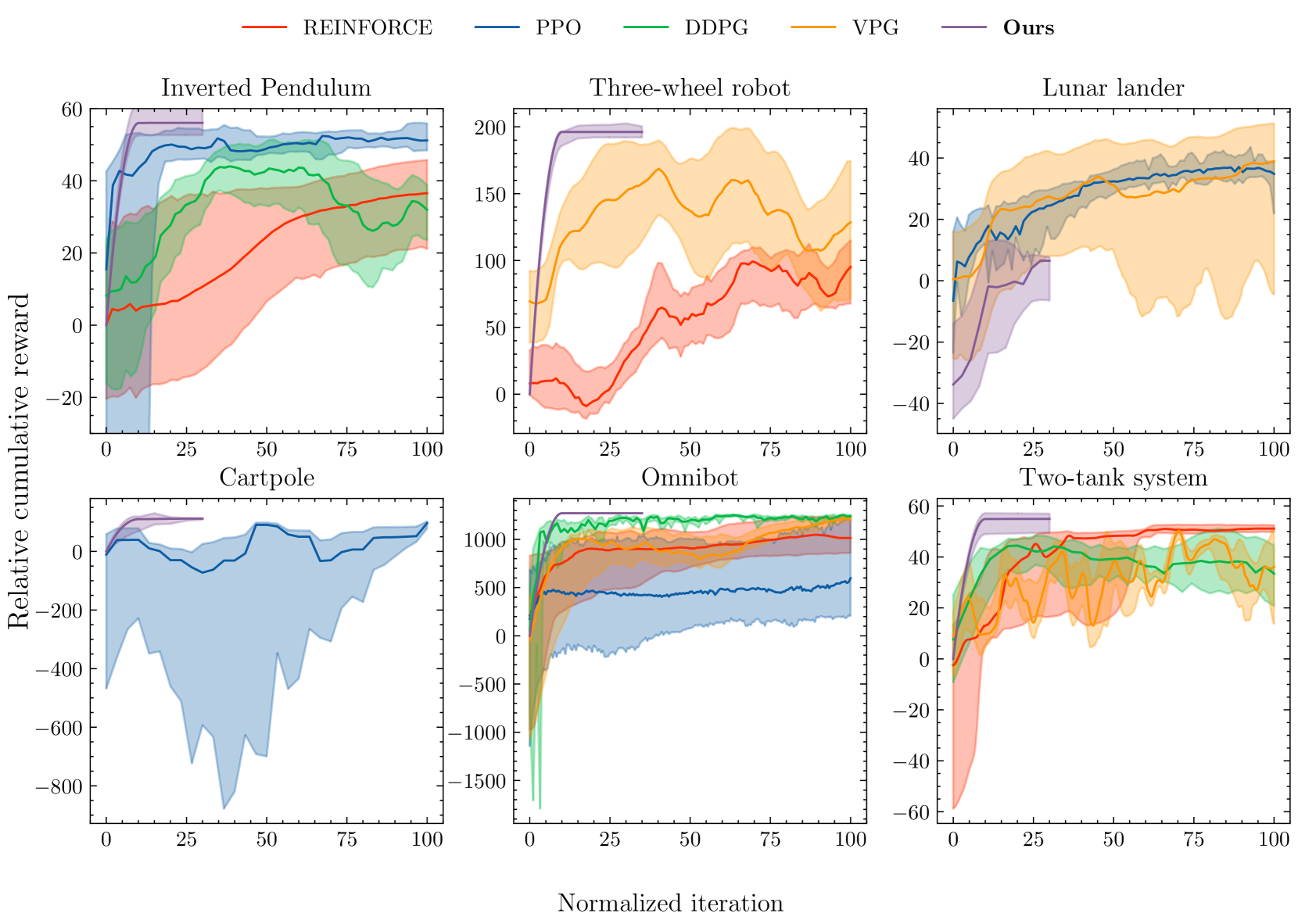
To test this, the authors design experiments using simulated robotic environments. They compare the performance of agents trained with varying levels of constant negative rewards, as well as agents trained without any negative rewards. The experiments evaluate factors like the time taken to reach the goal, the cumulative reward received, and the final distance to the goal.
The results suggest that moderate levels of constant negative rewards can indeed improve the efficiency of the learned policies, as the agents are incentivized to explore more broadly and find shorter paths to the goal. However, the authors also find that too much negative reinforcement can hamper the agent's ability to learn, leading to worse overall performance compared to agents trained without any negative rewards.
These findings have implications for the design of reward functions in robot learning, highlighting the need to carefully balance positive and negative reinforcement signals. The paper also discusses connections to related work on numeric reward machines and planning-aware reinforcement learning.
Critical Analysis
The paper provides a thoughtful investigation into the use of constant negative rewards in goal-reaching tasks for robot learning. The experimental design and analysis appear to be rigorous, and the authors do a good job of contextualizing their findings within the broader literature on reward shaping and exploration-exploitation trade-offs in reinforcement learning.
One potential limitation of the study is that it focuses on simulated environments, rather than real-world robotic systems. While simulations can provide valuable insights, it would be interesting to see how these findings translate to physical robot platforms and more complex real-world scenarios.
Additionally, the paper does not delve deeply into the theoretical underpinnings of why excessive negative rewards might hinder learning. [A more detailed analysis of the underlying mechanisms, perhaps drawing on concepts from numeric reward machines or planning-aware reinforcement learning, could further strengthen the theoretical foundation of the work.](https://aimodels.fyi/papers/arxiv/not-only-rewards-but-also-constraints-applications)
Overall, this paper makes a valuable contribution to the understanding of reward shaping in robot learning, highlighting the nuanced role that negative reinforcement can play. The findings could inform the design of more effective training algorithms and help researchers strike the right balance between positive and negative feedback signals.
Conclusion
This paper provides an important investigation into the use of constant negative rewards in goal-reaching tasks for robot learning. The authors demonstrate that while moderate levels of negative reinforcement can improve the efficiency of learned policies, excessive negative rewards can actually hinder the robot's ability to learn an effective strategy for reaching its goals.
These insights have significant implications for the design of reward functions in reinforcement learning systems, suggesting that researchers and engineers need to carefully consider the balance between positive and negative feedback signals. By building on this work, future studies could explore how these findings translate to real-world robotic applications and deepen our theoretical understanding of the underlying mechanisms at play.
Overall, this paper makes a valuable contribution to the field of robot learning, offering practical guidance and sparking new avenues for further research in this important area of study.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Backward Learning for Goal-Conditioned Policies
Marc Hoftmann, Jan Robine, Stefan Harmeling
0
0
Can we learn policies in reinforcement learning without rewards? Can we learn a policy just by trying to reach a goal state? We answer these questions positively by proposing a multi-step procedure that first learns a world model that goes backward in time, secondly generates goal-reaching backward trajectories, thirdly improves those sequences using shortest path finding algorithms, and finally trains a neural network policy by imitation learning. We evaluate our method on a deterministic maze environment where the observations are $64times 64$ pixel bird's eye images and can show that it consistently reaches several goals.
4/16/2024
An approach to improve agent learning via guaranteeing goal reaching in all episodes
Pavel Osinenko, Grigory Yaremenko, Georgiy Malaniya, Anton Bolychev
0
0
Reinforcement learning is commonly concerned with problems of maximizing accumulated rewards in Markov decision processes. Oftentimes, a certain goal state or a subset of the state space attain maximal reward. In such a case, the environment may be considered solved when the goal is reached. Whereas numerous techniques, learning or non-learning based, exist for solving environments, doing so optimally is the biggest challenge. Say, one may choose a reward rate which penalizes the action effort. Reinforcement learning is currently among the most actively developed frameworks for solving environments optimally by virtue of maximizing accumulated reward, in other words, returns. Yet, tuning agents is a notoriously hard task as reported in a series of works. Our aim here is to help the agent learn a near-optimal policy efficiently while ensuring a goal reaching property of some basis policy that merely solves the environment. We suggest an algorithm, which is fairly flexible, and can be used to augment practically any agent as long as it comprises of a critic. A formal proof of a goal reaching property is provided. Simulation experiments on six problems under five agents, including the benchmarked one, provided an empirical evidence that the learning can indeed be boosted while ensuring goal reaching property.
5/30/2024

Numeric Reward Machines
Kristina Levina, Nikolaos Pappas, Athanasios Karapantelakis, Aneta Vulgarakis Feljan, Jendrik Seipp
0
0
Reward machines inform reinforcement learning agents about the reward structure of the environment and often drastically speed up the learning process. However, reward machines only accept Boolean features such as robot-reached-gold. Consequently, many inherently numeric tasks cannot profit from the guidance offered by reward machines. To address this gap, we aim to extend reward machines with numeric features such as distance-to-gold. For this, we present two types of reward machines: numeric-Boolean and numeric. In a numeric-Boolean reward machine, distance-to-gold is emulated by two Boolean features distance-to-gold-decreased and robot-reached-gold. In a numeric reward machine, distance-to-gold is used directly alongside the Boolean feature robot-reached-gold. We compare our new approaches to a baseline reward machine in the Craft domain, where the numeric feature is the agent-to-target distance. We use cross-product Q-learning, Q-learning with counter-factual experiences, and the options framework for learning. Our experimental results show that our new approaches significantly outperform the baseline approach. Extending reward machines with numeric features opens up new possibilities of using reward machines in inherently numeric tasks.
5/1/2024
📉
PcLast: Discovering Plannable Continuous Latent States
Anurag Koul, Shivakanth Sujit, Shaoru Chen, Ben Evans, Lili Wu, Byron Xu, Rajan Chari, Riashat Islam, Raihan Seraj, Yonathan Efroni, Lekan Molu, Miro Dudik, John Langford, Alex Lamb
0
0
Goal-conditioned planning benefits from learned low-dimensional representations of rich observations. While compact latent representations typically learned from variational autoencoders or inverse dynamics enable goal-conditioned decision making, they ignore state reachability, hampering their performance. In this paper, we learn a representation that associates reachable states together for effective planning and goal-conditioned policy learning. We first learn a latent representation with multi-step inverse dynamics (to remove distracting information), and then transform this representation to associate reachable states together in $ell_2$ space. Our proposals are rigorously tested in various simulation testbeds. Numerical results in reward-based settings show significant improvements in sampling efficiency. Further, in reward-free settings this approach yields layered state abstractions that enable computationally efficient hierarchical planning for reaching ad hoc goals with zero additional samples.
6/12/2024