PcLast: Discovering Plannable Continuous Latent States
2311.03534
0
0
📉
Abstract
Goal-conditioned planning benefits from learned low-dimensional representations of rich observations. While compact latent representations typically learned from variational autoencoders or inverse dynamics enable goal-conditioned decision making, they ignore state reachability, hampering their performance. In this paper, we learn a representation that associates reachable states together for effective planning and goal-conditioned policy learning. We first learn a latent representation with multi-step inverse dynamics (to remove distracting information), and then transform this representation to associate reachable states together in $ell_2$ space. Our proposals are rigorously tested in various simulation testbeds. Numerical results in reward-based settings show significant improvements in sampling efficiency. Further, in reward-free settings this approach yields layered state abstractions that enable computationally efficient hierarchical planning for reaching ad hoc goals with zero additional samples.
Create account to get full access
Overview
- This paper explores how learned, low-dimensional representations of rich observations can benefit goal-conditioned planning.
- While compact latent representations from techniques like variational autoencoders or inverse dynamics enable goal-conditioned decision making, they can ignore state reachability, limiting their performance.
- The researchers propose learning a representation that associates reachable states together for more effective planning and goal-conditioned policy learning.
Plain English Explanation
The paper focuses on how computers can learn efficient ways to plan and make decisions when trying to reach certain goals. Often, these systems rely on compact, low-dimensional representations of the world, learned from techniques like variational autoencoders or inverse dynamics. While these representations can be useful for making decisions, they sometimes ignore whether certain states are actually reachable, which can hurt performance.
The researchers in this paper propose a new way to learn a representation that groups together states that are actually reachable. This allows the planning system to focus on the states it can actually get to, rather than wasting time on unreachable ones. The researchers test this approach rigorously in various simulations, and find that it leads to significant improvements in how efficiently the system can find rewards. They also show that this approach can enable efficient hierarchical planning in reward-free settings, where the system can figure out how to reach arbitrary goals without needing any additional training data.
Technical Explanation
The key innovation in this paper is the way the researchers learn a latent representation that associates reachable states together in the $\ell_2$ space. They first learn a latent representation using multi-step inverse dynamics, which helps remove distracting information from the representation. They then transform this representation to explicitly associate reachable states together.
This is in contrast to previous approaches that relied on compact latent representations from techniques like variational autoencoders or inverse dynamics, which could ignore state reachability and hinder goal-conditioned planning and policy learning.
The researchers thoroughly evaluate their approach in various simulated environments. In reward-based settings, they demonstrate significant improvements in sampling efficiency compared to baselines. In reward-free settings, their method yields layered state abstractions that enable computationally efficient hierarchical planning for reaching arbitrary goals without any additional training data.
Critical Analysis
The paper provides a well-designed and rigorous evaluation of the proposed approach, testing it across a variety of simulation environments. However, the authors acknowledge that their method relies on the availability of a simulator or model of the environment, which may not always be the case in real-world applications.
Additionally, the paper does not explore the generalization capabilities of the learned representations beyond the specific environments used in the experiments. It would be interesting to see how well the approach transfers to new, previously unseen tasks or environments.
The authors also mention that their method for associating reachable states in the latent space could be sensitive to the choice of hyperparameters and architectural details. Further research may be needed to better understand the robustness and stability of the proposed representation learning approach.
Conclusion
This paper presents an innovative approach to learning latent representations that explicitly associate reachable states together, which can significantly improve the performance of goal-conditioned planning and policy learning. The researchers demonstrate impressive results in both reward-based and reward-free settings, showcasing the potential of their method to enable more efficient and capable decision-making systems.
While the approach relies on the availability of a simulator or model, and its generalization capabilities remain to be fully explored, this work represents an important step forward in goal-conditioned policy learning and sample-efficient reinforcement learning. Continued research in this direction could lead to more capable and adaptable AI agents that can better navigate complex environments and achieve a wide range of objectives.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
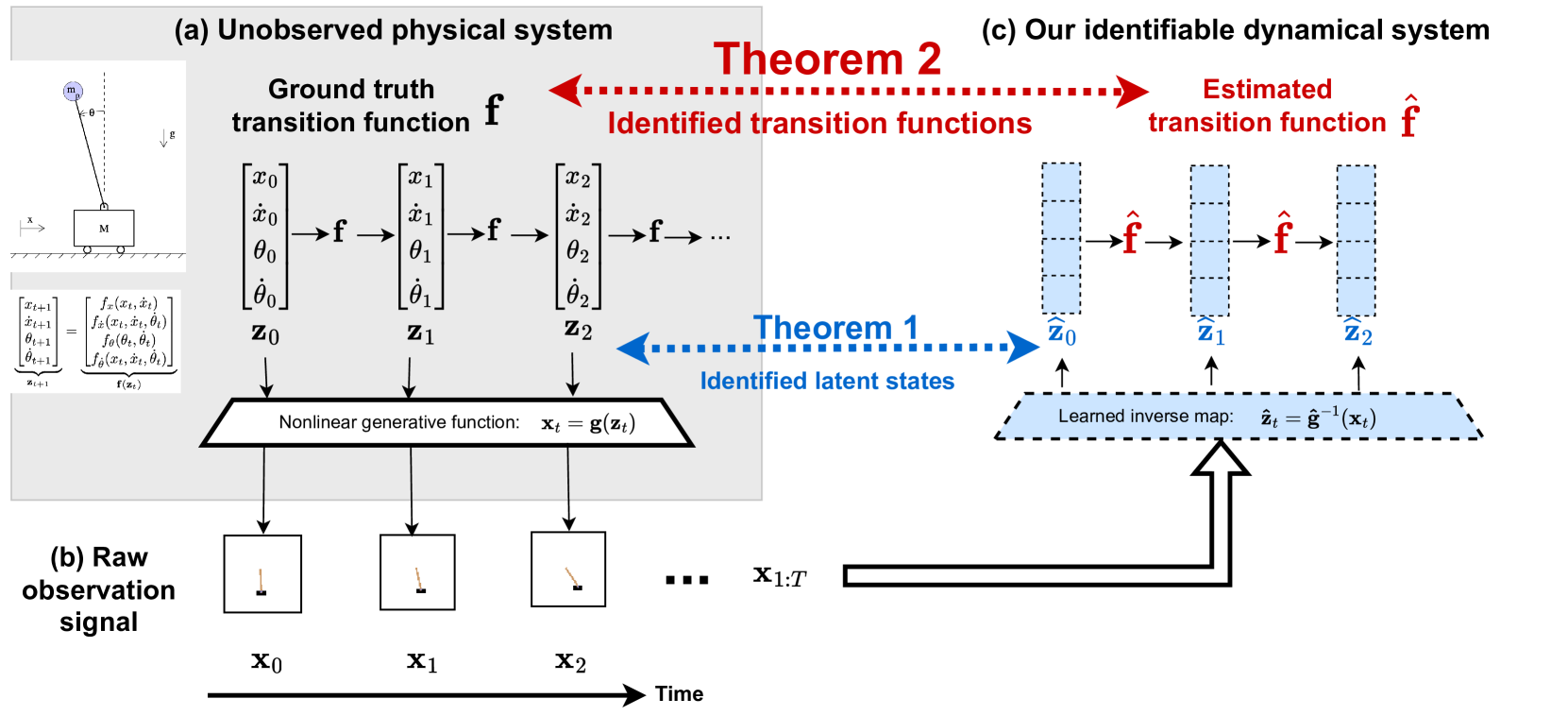
Identifying latent state transition in non-linear dynamical systems
c{C}au{g}lar H{i}zl{i}, c{C}au{g}atay Y{i}ld{i}z, Matthias Bethge, ST John, Pekka Marttinen
0
0
This work aims to improve generalization and interpretability of dynamical systems by recovering the underlying lower-dimensional latent states and their time evolutions. Previous work on disentangled representation learning within the realm of dynamical systems focused on the latent states, possibly with linear transition approximations. As such, they cannot identify nonlinear transition dynamics, and hence fail to reliably predict complex future behavior. Inspired by the advances in nonlinear ICA, we propose a state-space modeling framework in which we can identify not just the latent states but also the unknown transition function that maps the past states to the present. We introduce a practical algorithm based on variational auto-encoders and empirically demonstrate in realistic synthetic settings that we can (i) recover latent state dynamics with high accuracy, (ii) correspondingly achieve high future prediction accuracy, and (iii) adapt fast to new environments.
6/7/2024

Learning telic-controllable state representations
Nadav Amir, Stas Tiomkin, Angela Langdon
0
0
Computational accounts of purposeful behavior consist of descriptive and normative aspects. The former enable agents to ascertain the current (or future) state of affairs in the world and the latter to evaluate the desirability, or lack thereof, of these states with respect to the agent's goals. In Reinforcement Learning, the normative aspect (reward and value functions) is assumed to depend on a pre-defined and fixed descriptive one (state representation). Alternatively, these two aspects may emerge interdependently: goals can be, and indeed often are, expressed in terms of state representation features, but they may also serve to shape state representations themselves. Here, we illustrate a novel theoretical framing of state representation learning in bounded agents, coupling descriptive and normative aspects via the notion of goal-directed, or telic, states. We define a new controllability property of telic state representations to characterize the tradeoff between their granularity and the policy complexity capacity required to reach all telic states. We propose an algorithm for learning controllable state representations and demonstrate it using a simple navigation task with changing goals. Our framework highlights the crucial role of deliberate ignorance - knowing what to ignore - for learning state representations that are both goal-flexible and simple. More broadly, our work provides a concrete step towards a unified theoretical view of natural and artificial learning through the lens of goals.
6/21/2024
👨🏫
Generalizing Multi-Step Inverse Models for Representation Learning to Finite-Memory POMDPs
Lili Wu, Ben Evans, Riashat Islam, Raihan Seraj, Yonathan Efroni, Alex Lamb
0
0
Discovering an informative, or agent-centric, state representation that encodes only the relevant information while discarding the irrelevant is a key challenge towards scaling reinforcement learning algorithms and efficiently applying them to downstream tasks. Prior works studied this problem in high-dimensional Markovian environments, when the current observation may be a complex object but is sufficient to decode the informative state. In this work, we consider the problem of discovering the agent-centric state in the more challenging high-dimensional non-Markovian setting, when the state can be decoded from a sequence of past observations. We establish that generalized inverse models can be adapted for learning agent-centric state representation for this task. Our results include asymptotic theory in the deterministic dynamics setting as well as counter-examples for alternative intuitive algorithms. We complement these findings with a thorough empirical study on the agent-centric state discovery abilities of the different alternatives we put forward. Particularly notable is our analysis of past actions, where we show that these can be a double-edged sword: making the algorithms more successful when used correctly and causing dramatic failure when used incorrectly.
4/24/2024

Latent State Estimation Helps UI Agents to Reason
William E Bishop, Alice Li, Christopher Rawles, Oriana Riva
0
0
A common problem for agents operating in real-world environments is that the response of an environment to their actions may be non-deterministic and observed through noise. This renders environmental state and progress towards completing a task latent. Despite recent impressive demonstrations of LLM's reasoning abilities on various benchmarks, whether LLMs can build estimates of latent state and leverage them for reasoning has not been explicitly studied. We investigate this problem in the real-world domain of autonomous UI agents. We establish that appropriately prompting LLMs in a zero-shot manner can be formally understood as forming point estimates of latent state in a textual space. In the context of autonomous UI agents we then show that LLMs used in this manner are more than $76%$ accurate at inferring various aspects of latent state, such as performed (vs. commanded) actions and task progression. Using both public and internal benchmarks and three reasoning methods (zero-shot, CoT-SC & ReAct), we show that LLM-powered agents that explicitly estimate and reason about latent state are able to successfully complete up to 1.6x more tasks than those that do not.
5/21/2024