Risk-Aware Real-Time Task Allocation for Stochastic Multi-Agent Systems under STL Specifications
2404.02111
0
0
Abstract
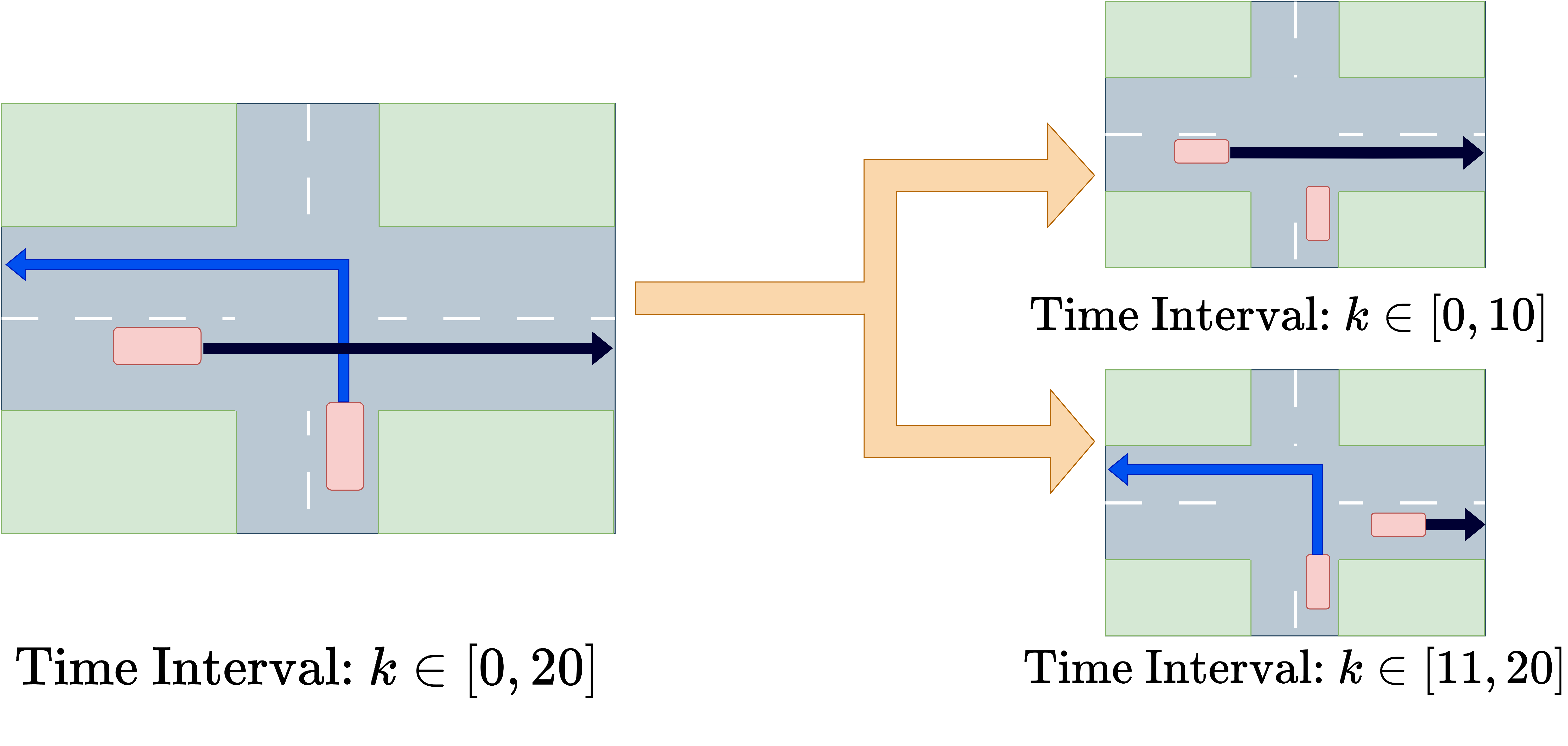
This paper addresses the control synthesis of heterogeneous stochastic linear multi-agent systems with real-time allocation of signal temporal logic (STL) specifications. Based on previous work, we decompose specifications into sub-specifications on the individual agent level. To leverage the efficiency of task allocation, a heuristic filter evaluates potential task allocation based on STL robustness. Subsequently, an auctioning algorithm determines the definite allocation of specifications. Finally, a control strategy is synthesized for each agent-specification pair using tube-based Model Predictive Control (MPC), ensuring provable probabilistic satisfaction. We demonstrate the efficacy of the proposed methods using a multi-bus scenario that highlights a promising extension to autonomous driving applications like crossing an intersection.
Create account to get full access
Overview
- This paper proposes a risk-aware real-time task allocation algorithm for multi-agent systems operating under uncertain conditions.
- The algorithm aims to assign tasks to agents while considering the risk of not meeting temporal logic specifications.
- The approach combines stochastic optimization with signal temporal logic (STL) to balance task completion and risk.
Plain English Explanation
Imagine you have a team of robotic assistants (the agents) that need to perform various tasks around a building. The tasks have deadlines and requirements, like "Deliver the package to the third floor by 2pm." The robots have to figure out the best way to divide up and complete all the tasks.
This is challenging because there's always some uncertainty - the robots may encounter obstacles, run out of battery, or get delayed. Simply trying to complete all the tasks as quickly as possible could lead to missed deadlines or other problems.
The researchers developed a new algorithm that helps the robots allocate tasks in a "risk-aware" way. It considers the probability that each robot will successfully complete its assigned tasks on time, and tries to balance efficiency with managing the overall risk. This allows the team to complete the necessary tasks while limiting the chances of missing a critical deadline or requirement.
The algorithm uses an approach called signal temporal logic (STL) to precisely specify the task requirements. It then uses optimization techniques to find the best task assignments, taking into account the uncertain factors that could affect each robot's performance. This helps the robot team operate reliably even in unpredictable environments.
Technical Explanation
The paper presents a risk-aware real-time task allocation algorithm for multi-agent systems subject to stochastic disturbances and required to satisfy signal temporal logic (STL) specifications.
The problem is formulated as a two-stage stochastic optimization problem. In the first stage, the algorithm decides on the initial task allocation. In the second stage, it re-optimizes the task allocation in real-time as the agents execute their assigned tasks and new information becomes available.
The risk-aware nature of the approach is captured by incorporating the probability of satisfying the STL specifications into the optimization objective. This allows the algorithm to balance task completion with managing the overall risk of constraint violations.
The authors develop a novel sampling-based method to efficiently estimate the probabilistic STL constraints. This avoids the need for computationally expensive Monte Carlo simulations.
The proposed algorithm is evaluated through numerical simulations of a multi-robot package delivery scenario. The results demonstrate improved task completion rates and reduced risk compared to baseline approaches that do not consider risk.
Critical Analysis
The paper presents a thorough and well-designed approach to the problem of risk-aware task allocation in stochastic multi-agent systems. The use of STL to precisely specify the task requirements is a key strength, as it allows the algorithm to reason about complex temporal and logical constraints.
One potential limitation is the reliance on accurate stochastic models of the agent dynamics and disturbances. In real-world scenarios, these models may be difficult to obtain or subject to their own uncertainties. The authors acknowledge this and suggest incorporating online learning or adaptive techniques to address model errors.
Additionally, the computational complexity of the proposed algorithm may limit its applicability to large-scale systems with many agents and tasks. While the sampling-based method helps improve efficiency, further research into scalable optimization techniques could expand the approach's practical utility.
Overall, this work makes a valuable contribution by incorporating risk awareness into real-time task allocation, which is an important consideration for the safe and reliable deployment of autonomous multi-agent systems in uncertain environments.
Conclusion
This paper presents a novel risk-aware real-time task allocation algorithm for stochastic multi-agent systems operating under signal temporal logic (STL) specifications. The approach combines stochastic optimization with a probabilistic interpretation of the STL constraints, allowing the system to balance task completion and risk management.
The key insights from this research include the use of STL to precisely capture task requirements, the development of an efficient sampling-based method for estimating probabilistic STL constraints, and the incorporation of risk awareness into the real-time task allocation process.
This work has implications for the deployment of autonomous multi-agent systems in a wide range of applications, from package delivery to search and rescue operations, where reliable task completion under uncertainty is crucial. Further research into scalable optimization techniques and adaptive modeling could help expand the practical applicability of this risk-aware approach.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔮
Decomposition-based Hierarchical Task Allocation and Planning for Multi-Robots under Hierarchical Temporal Logic Specifications
Xusheng Luo, Shaojun Xu, Ruixuan Liu, Changliu Liu
0
0
Past research into robotic planning with temporal logic specifications, notably Linear Temporal Logic (LTL), was largely based on a single formula for individual or groups of robots. But with increasing task complexity, LTL formulas unavoidably grow lengthy, complicating interpretation and specification generation, and straining the computational capacities of the planners. A recent development has been the hierarchical representation of LTL~cite{luo2024simultaneous} that contains multiple temporal logic specifications, providing a more interpretable framework. However, the proposed planning algorithm assumes the independence of robots within each specification, limiting their application to multi-robot coordination with complex temporal constraints. In this work, we formulated a decomposition-based hierarchical framework. At the high level, each specification is first decomposed into a set of atomic sub-tasks. We further infer the temporal relations among the sub-tasks of different specifications to construct a task network. Subsequently, a Mixed Integer Linear Program is used to assign sub-tasks to various robots. At the lower level, domain-specific controllers are employed to execute sub-tasks. Our approach was experimentally applied to domains of navigation and manipulation. The simulation demonstrated that our approach can find better solutions using less runtimes.
5/27/2024
➖
Reactive Temporal Logic-based Planning and Control for Interactive Robotic Tasks
Farhad Nawaz, Shaoting Peng, Lars Lindemann, Nadia Figueroa, Nikolai Matni
0
0
Robots interacting with humans must be safe, reactive and adapt online to unforeseen environmental and task changes. Achieving these requirements concurrently is a challenge as interactive planners lack formal safety guarantees, while safe motion planners lack flexibility to adapt. To tackle this, we propose a modular control architecture that generates both safe and reactive motion plans for human-robot interaction by integrating temporal logic-based discrete task level plans with continuous Dynamical System (DS)-based motion plans. We formulate a reactive temporal logic formula that enables users to define task specifications through structured language, and propose a planning algorithm at the task level that generates a sequence of desired robot behaviors while being adaptive to environmental changes. At the motion level, we incorporate control Lyapunov functions and control barrier functions to compute stable and safe continuous motion plans for two types of robot behaviors: (i) complex, possibly periodic motions given by autonomous DS and (ii) time-critical tasks specified by Signal Temporal Logic~(STL). Our methodology is demonstrated on the Franka robot arm performing wiping tasks on a whiteboard and a mannequin that is compliant to human interactions and adaptive to environmental changes.
5/1/2024
🏅
Logical Specifications-guided Dynamic Task Sampling for Reinforcement Learning Agents
Yash Shukla, Tanushree Burman, Abhishek Kulkarni, Robert Wright, Alvaro Velasquez, Jivko Sinapov
0
0
Reinforcement Learning (RL) has made significant strides in enabling artificial agents to learn diverse behaviors. However, learning an effective policy often requires a large number of environment interactions. To mitigate sample complexity issues, recent approaches have used high-level task specifications, such as Linear Temporal Logic (LTL$_f$) formulas or Reward Machines (RM), to guide the learning progress of the agent. In this work, we propose a novel approach, called Logical Specifications-guided Dynamic Task Sampling (LSTS), that learns a set of RL policies to guide an agent from an initial state to a goal state based on a high-level task specification, while minimizing the number of environmental interactions. Unlike previous work, LSTS does not assume information about the environment dynamics or the Reward Machine, and dynamically samples promising tasks that lead to successful goal policies. We evaluate LSTS on a gridworld and show that it achieves improved time-to-threshold performance on complex sequential decision-making problems compared to state-of-the-art RM and Automaton-guided RL baselines, such as Q-Learning for Reward Machines and Compositional RL from logical Specifications (DIRL). Moreover, we demonstrate that our method outperforms RM and Automaton-guided RL baselines in terms of sample-efficiency, both in a partially observable robotic task and in a continuous control robotic manipulation task.
4/4/2024
➖
Fast and Adaptive Multi-agent Planning under Collaborative Temporal Logic Tasks via Poset Products
Zesen Liu, Meng Guo, Weimin Bao, Zhongkui Li
0
0
Efficient coordination and planning is essential for large-scale multi-agent systems that collaborate in a shared dynamic environment. Heuristic search methods or learning-based approaches often lack the guarantee on correctness and performance. Moreover, when the collaborative tasks contain both spatial and temporal requirements, e.g., as Linear Temporal Logic (LTL) formulas, formal methods provide a verifiable framework for task planning. However, since the planning complexity grows exponentially with the number of agents and the length of the task formula, existing studies are mostly limited to small artificial cases. To address this issue, a new planning paradigm is proposed in this work for system-wide temporal task formulas that are released online and continually. It avoids two common bottlenecks in the traditional methods, i.e., (i) the direct translation of the complete task formula to the associated Buchi automaton; and (ii) the synchronized product between the Buchi automaton and the transition models of all agents. Instead, an adaptive planning algorithm is proposed that computes the product of relaxed partially-ordered sets (R-posets) on-the-fly, and assigns these subtasks to the agents subject to the ordering constraints. It is shown that the first valid plan can be derived with a polynomial time and memory complexity w.r.t. the system size and the formula length. Our method can take into account task formulas with a length of more than 400 and a fleet with more than $400$ agents, while most existing methods fail at the formula length of 25 within a reasonable duration. The proposed method is validated on large fleets of service robots in both simulation and hardware experiments.
4/10/2024