Fast and Adaptive Multi-agent Planning under Collaborative Temporal Logic Tasks via Poset Products
2308.11373
0
0
➖
Abstract
Efficient coordination and planning is essential for large-scale multi-agent systems that collaborate in a shared dynamic environment. Heuristic search methods or learning-based approaches often lack the guarantee on correctness and performance. Moreover, when the collaborative tasks contain both spatial and temporal requirements, e.g., as Linear Temporal Logic (LTL) formulas, formal methods provide a verifiable framework for task planning. However, since the planning complexity grows exponentially with the number of agents and the length of the task formula, existing studies are mostly limited to small artificial cases. To address this issue, a new planning paradigm is proposed in this work for system-wide temporal task formulas that are released online and continually. It avoids two common bottlenecks in the traditional methods, i.e., (i) the direct translation of the complete task formula to the associated Buchi automaton; and (ii) the synchronized product between the Buchi automaton and the transition models of all agents. Instead, an adaptive planning algorithm is proposed that computes the product of relaxed partially-ordered sets (R-posets) on-the-fly, and assigns these subtasks to the agents subject to the ordering constraints. It is shown that the first valid plan can be derived with a polynomial time and memory complexity w.r.t. the system size and the formula length. Our method can take into account task formulas with a length of more than 400 and a fleet with more than $400$ agents, while most existing methods fail at the formula length of 25 within a reasonable duration. The proposed method is validated on large fleets of service robots in both simulation and hardware experiments.
Create account to get full access
Overview
- Coordinating and planning is crucial for large-scale multi-agent systems that work together in dynamic environments.
- Existing approaches like heuristic search or learning-based methods often lack guarantees on correctness and performance.
- When tasks involve both spatial and temporal requirements (e.g., Linear Temporal Logic formulas), formal methods can provide a verifiable planning framework.
- However, planning complexity grows exponentially with the number of agents and the length of the task formula, limiting existing studies to small cases.
Plain English Explanation
When you have a large group of robots or other autonomous agents working together in a constantly changing environment, it's essential that they can coordinate their actions and plan effectively. Traditional methods like heuristic search or learning-based approaches often can't guarantee that the final plan will be correct and perform well.
This is especially challenging when the tasks involve both spatial and temporal requirements, like needing to visit certain locations in a specific order. Formal methods can help with this, but as the number of agents and the complexity of the tasks grow, the planning process becomes exponentially more difficult. Most existing studies have only been able to handle small, simplified scenarios.
Technical Explanation
To address these limitations, the researchers propose a new planning approach for large-scale multi-agent systems with complex, time-dependent tasks. Instead of directly translating the full task formula into a Büchi automaton and then synchronizing it with all the agents' transition models (a common bottleneck), their adaptive planning algorithm computes the product of relaxed partially-ordered sets (R-posets) on-the-fly.
This allows them to assign the resulting subtasks to the agents while respecting the ordering constraints, without the need to build the complete Büchi automaton upfront. They show that this approach can derive the first valid plan with a polynomial time and memory complexity, rather than the exponential complexity of traditional methods.
The researchers' method can handle task formulas with over 400 elements and fleets of more than 400 agents, vastly outperforming existing techniques that struggle with formulas as short as 25 elements. They validate their approach through both simulation and real-world experiments with large teams of service robots.
Critical Analysis
The proposed planning algorithm seems to be a significant advancement, allowing for the efficient coordination of large-scale multi-agent systems with complex, temporally-structured tasks. By avoiding the bottlenecks of previous methods, the researchers have developed a scalable approach that can handle much larger problem sizes than what has been possible before.
However, the paper does not discuss the potential limitations or edge cases of their method. For example, it's unclear how well the approach would handle highly dynamic environments with frequent changes, or scenarios where the agents have heterogeneous capabilities and constraints. Risk-aware task allocation could be an important consideration in some applications.
Additionally, the researchers focus solely on the planning aspect and do not address the challenge of adapting the plans as needed based on real-time feedback and changes in the environment. Integrating their planning approach with robust execution monitoring and replanning capabilities could further enhance its practical utility.
Conclusion
The researchers have developed a novel planning paradigm that enables efficient coordination and task allocation for large-scale multi-agent systems with complex temporal requirements. By avoiding the computational bottlenecks of traditional methods, their approach can handle problem sizes that were previously intractable, opening up new possibilities for the deployment of collaborative robotic systems in a wide range of real-world applications.
While the paper demonstrates the effectiveness of the proposed technique, further research is needed to address the potential limitations and expand the method's capabilities to handle more dynamic and uncertain environments. As the field of multi-agent systems continues to evolve, this work represents an important step forward in the quest for scalable, reliable, and verifiable coordination strategies.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
✨
Prioritize Team Actions: Multi-Agent Temporal Logic Task Planning with Ordering Constraints
Bowen Ye, Jianing Zhao, Shaoyuan Li, Xiang Yin
0
0
In this paper, we investigate the problem of linear temporal logic (LTL) path planning for multi-agent systems, introducing the new concept of emph{ordering constraints}. Specifically, we consider a generic objective function that is defined for the path of each individual agent. The primary objective is to find a global plan for the team of agents, ensuring they collectively meet the specified LTL requirements. Simultaneously, we aim to maintain a pre-determined order in the values of the objective function for each agent, which we refer to as the ordering constraints. This new requirement stems from scenarios like security-aware planning, where relative orders outweigh absolute values in importance. We present an efficient algorithm to solve this problem, supported by proofs of correctness that demonstrate the optimality of our solution. Additionally, we provide a case study in security-aware path planning to illustrate the practicality and effectiveness of our proposed approach.
4/9/2024
🔮
Decomposition-based Hierarchical Task Allocation and Planning for Multi-Robots under Hierarchical Temporal Logic Specifications
Xusheng Luo, Shaojun Xu, Ruixuan Liu, Changliu Liu
0
0
Past research into robotic planning with temporal logic specifications, notably Linear Temporal Logic (LTL), was largely based on a single formula for individual or groups of robots. But with increasing task complexity, LTL formulas unavoidably grow lengthy, complicating interpretation and specification generation, and straining the computational capacities of the planners. A recent development has been the hierarchical representation of LTL~cite{luo2024simultaneous} that contains multiple temporal logic specifications, providing a more interpretable framework. However, the proposed planning algorithm assumes the independence of robots within each specification, limiting their application to multi-robot coordination with complex temporal constraints. In this work, we formulated a decomposition-based hierarchical framework. At the high level, each specification is first decomposed into a set of atomic sub-tasks. We further infer the temporal relations among the sub-tasks of different specifications to construct a task network. Subsequently, a Mixed Integer Linear Program is used to assign sub-tasks to various robots. At the lower level, domain-specific controllers are employed to execute sub-tasks. Our approach was experimentally applied to domains of navigation and manipulation. The simulation demonstrated that our approach can find better solutions using less runtimes.
5/27/2024
➖
Reactive Temporal Logic-based Planning and Control for Interactive Robotic Tasks
Farhad Nawaz, Shaoting Peng, Lars Lindemann, Nadia Figueroa, Nikolai Matni
0
0
Robots interacting with humans must be safe, reactive and adapt online to unforeseen environmental and task changes. Achieving these requirements concurrently is a challenge as interactive planners lack formal safety guarantees, while safe motion planners lack flexibility to adapt. To tackle this, we propose a modular control architecture that generates both safe and reactive motion plans for human-robot interaction by integrating temporal logic-based discrete task level plans with continuous Dynamical System (DS)-based motion plans. We formulate a reactive temporal logic formula that enables users to define task specifications through structured language, and propose a planning algorithm at the task level that generates a sequence of desired robot behaviors while being adaptive to environmental changes. At the motion level, we incorporate control Lyapunov functions and control barrier functions to compute stable and safe continuous motion plans for two types of robot behaviors: (i) complex, possibly periodic motions given by autonomous DS and (ii) time-critical tasks specified by Signal Temporal Logic~(STL). Our methodology is demonstrated on the Franka robot arm performing wiping tasks on a whiteboard and a mannequin that is compliant to human interactions and adaptive to environmental changes.
5/1/2024
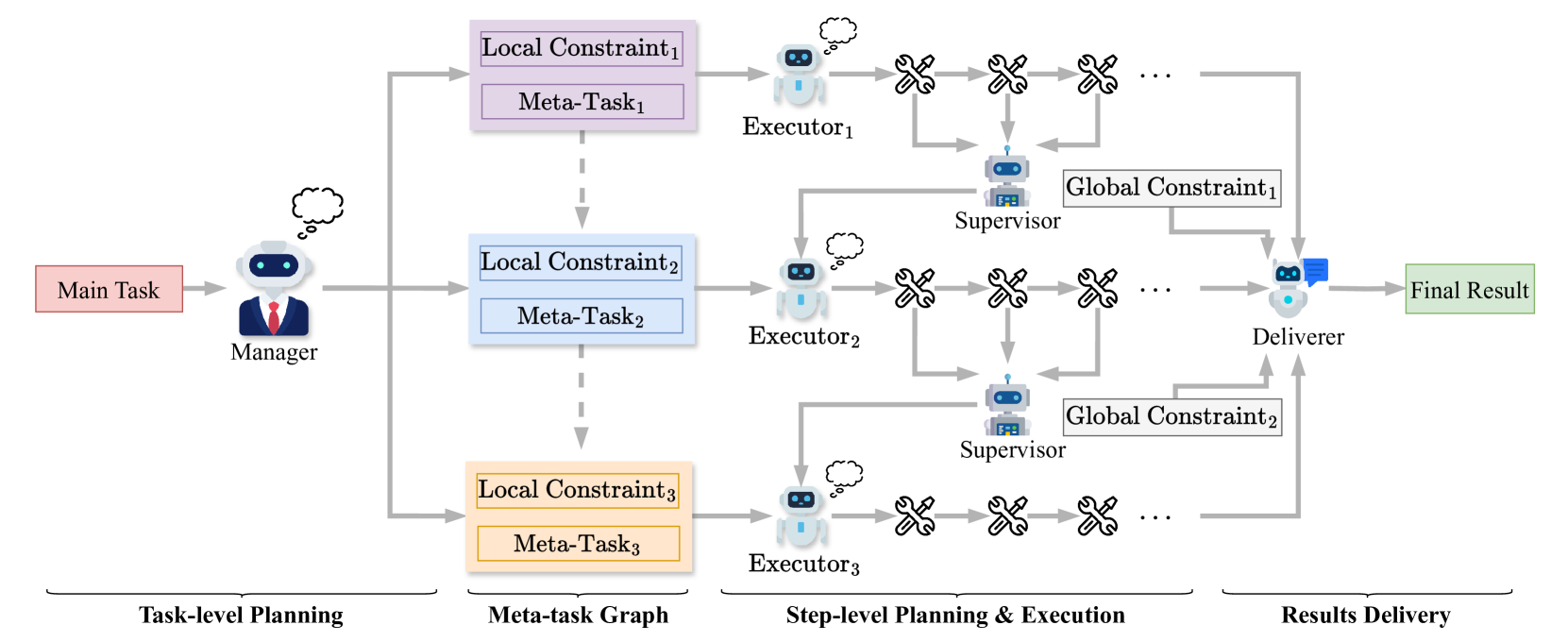
Meta-Task Planning for Language Agents
Cong Zhang, Derrick Goh Xin Deik, Dexun Li, Hao Zhang, Yong Liu
0
0
The rapid advancement of neural language models has sparked a new surge of intelligent agent research. Unlike traditional agents, large language model-based agents (LLM agents) have emerged as a promising paradigm for achieving artificial general intelligence (AGI) due to their superior reasoning and generalization capabilities. Effective planning is crucial for the success of LLM agents in real-world tasks, making it a highly pursued topic in the community. Current planning methods typically translate tasks into executable action sequences. However, determining a feasible or optimal sequence for complex tasks at fine granularity, which often requires compositing long chains of heterogeneous actions, remains challenging. This paper introduces Meta-Task Planning (MTP), a zero-shot methodology for collaborative LLM-based multi-agent systems that simplifies complex task planning by decomposing it into a hierarchy of subordinate tasks, or meta-tasks. Each meta-task is then mapped into executable actions. MTP was assessed on two rigorous benchmarks, TravelPlanner and API-Bank. Notably, MTP achieved an average $sim40%$ success rate on TravelPlanner, significantly higher than the state-of-the-art (SOTA) baseline ($2.92%$), and outperforming $LLM_{api}$-4 with ReAct on API-Bank by $sim14%$, showing the immense potential of integrating LLM with multi-agent systems.
5/31/2024