Robust Gaussian Splatting
2404.04211
0
1

Abstract
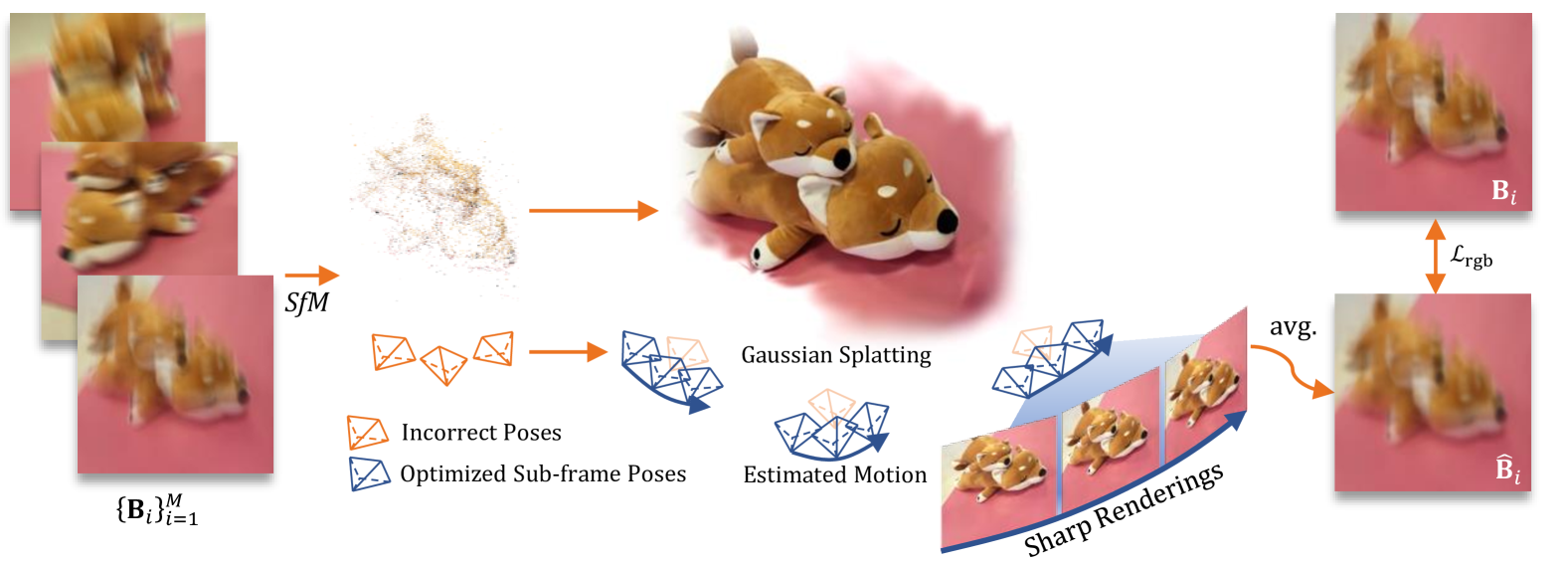
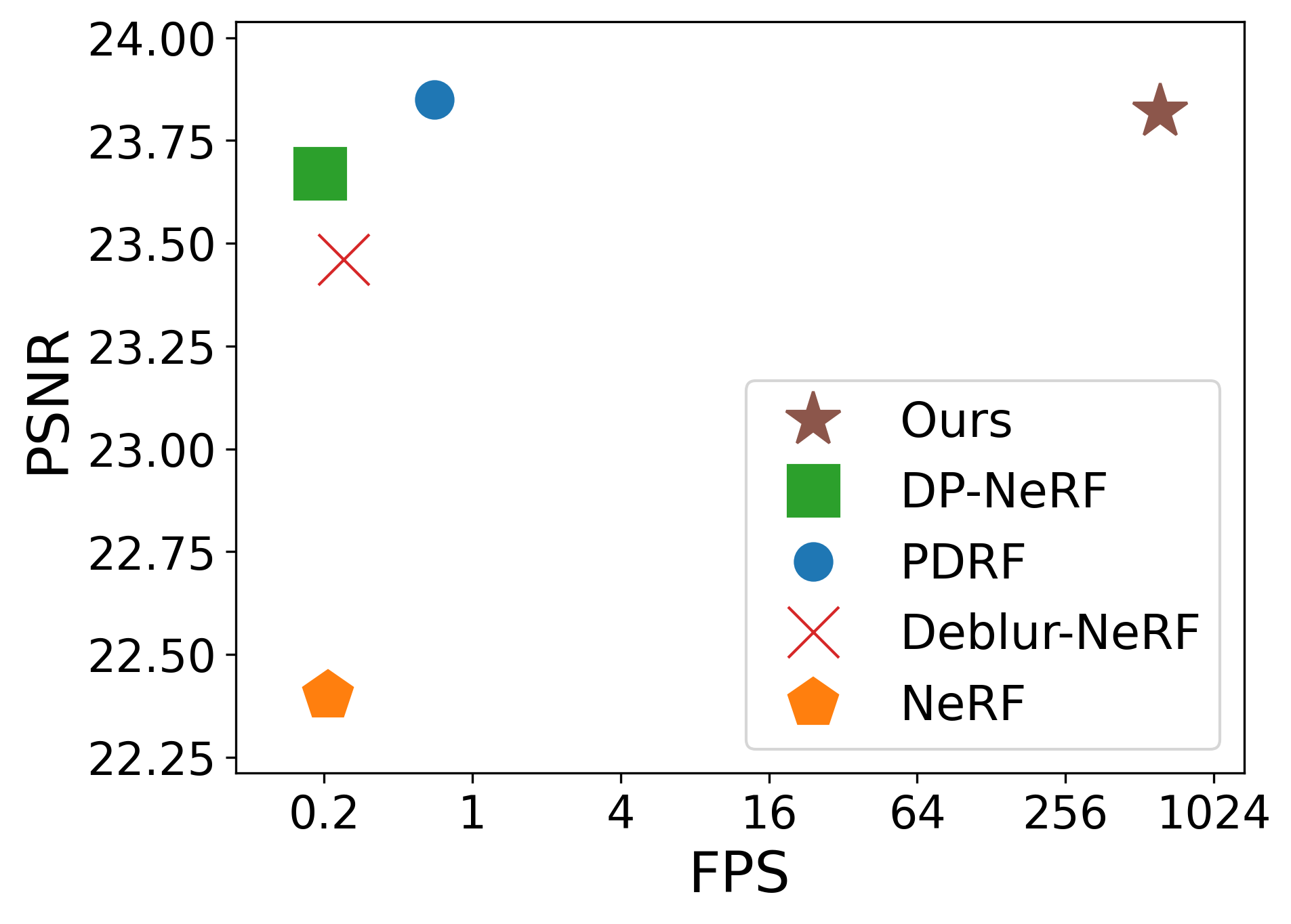
In this paper, we address common error sources for 3D Gaussian Splatting (3DGS) including blur, imperfect camera poses, and color inconsistencies, with the goal of improving its robustness for practical applications like reconstructions from handheld phone captures. Our main contribution involves modeling motion blur as a Gaussian distribution over camera poses, allowing us to address both camera pose refinement and motion blur correction in a unified way. Additionally, we propose mechanisms for defocus blur compensation and for addressing color in-consistencies caused by ambient light, shadows, or due to camera-related factors like varying white balancing settings. Our proposed solutions integrate in a seamless way with the 3DGS formulation while maintaining its benefits in terms of training efficiency and rendering speed. We experimentally validate our contributions on relevant benchmark datasets including Scannet++ and Deblur-NeRF, obtaining state-of-the-art results and thus consistent improvements over relevant baselines.
Create account to get full access
Overview
- This paper presents a novel technique called "Robust Gaussian Splatting" for optimizing 3D object poses and handling motion blur in computer vision tasks.
- The method builds upon the concept of Gaussian splatting, which has been used for surface reconstruction and structuring Gaussian splatting using optimal transport.
- The key innovation is the introduction of robustness to outliers and noise, which is achieved through a novel loss function and optimization approach.
Plain English Explanation
Robust Gaussian Splatting is a technique that helps computers understand 3D objects and how they move. It builds on an existing method called Gaussian splatting, which has been used to reconstruct 3D surfaces and organize Gaussian splatting data.
The main idea behind Robust Gaussian Splatting is to make the computer vision system more robust, or resistant, to outliers and noise in the data. Outliers are data points that don't fit the normal pattern, and noise is random interference that can distort the data.
By developing a new loss function (a way to measure how well the computer model is performing) and a new optimization approach (a way to improve the model), the researchers were able to create a system that can handle these challenges better than previous methods. This allows the computer to more accurately estimate the 3D poses (positions and orientations) of objects, even when there is motion blur or other distortions in the input data.
The improved robustness of this technique can be useful in a variety of computer vision applications, such as object tracking, augmented reality, and autonomous navigation, where accurately understanding 3D objects and their movements is crucial.
Technical Explanation
The Robust Gaussian Splatting technique builds on the concept of Gaussian splatting, which has been used for surface reconstruction and structuring Gaussian splatting using optimal transport. Gaussian splatting represents 3D points as Gaussian distributions, which can be efficiently rendered and integrated into downstream tasks.
The key innovation in Robust Gaussian Splatting is the introduction of a robust loss function and optimization approach to handle outliers and noise in the data. The researchers developed a novel loss function that combines a data term (measuring how well the model fits the observed data) and a regularization term (encouraging smooth and plausible 3D poses).
The optimization process involves alternating between estimating the 3D poses of objects and updating the Gaussian distributions that represent them. This iterative approach allows the system to gradually converge to a solution that is robust to outliers and noise in the input data.
The authors demonstrate the effectiveness of Robust Gaussian Splatting through experiments on 3D pose optimization and motion blur handling tasks. They show that their method outperforms previous Gaussian splatting approaches, particularly in the presence of challenging real-world conditions, such as occlusions, clutter, and motion blur.
Critical Analysis
The paper presents a well-designed and implemented approach to enhance the robustness of Gaussian splatting for 3D pose optimization and motion blur handling. The authors have clearly identified the limitations of previous Gaussian splatting methods and have proposed a thoughtful solution to address these issues.
One potential limitation of the Robust Gaussian Splatting approach is that it may be computationally more expensive than simpler, less robust methods, particularly in real-time applications. The iterative optimization process could be a bottleneck, and the authors may need to explore ways to improve the efficiency of the algorithm.
Additionally, the paper does not provide a thorough analysis of the failure cases or edge cases of the Robust Gaussian Splatting technique. It would be helpful to understand the specific conditions or types of data where the method may still struggle, so that future researchers can build upon this work and further improve the robustness and generalization capabilities of the approach.
Conclusion
The Robust Gaussian Splatting technique presented in this paper is a significant advancement in the field of 3D computer vision. By introducing robustness to outliers and noise, the method can more accurately estimate the 3D poses of objects, even in the presence of challenging real-world conditions, such as occlusions, clutter, and motion blur.
This improved robustness has the potential to enhance a wide range of computer vision applications, including object tracking, augmented reality, and autonomous navigation, where accurately understanding 3D objects and their movements is crucial. While the computational cost of the method may be a concern, the authors have demonstrated the effectiveness of their approach through thorough experimentation, and future research can explore ways to optimize the algorithm for real-time performance.
Overall, the Robust Gaussian Splatting technique represents an important step forward in the field of 3D computer vision, and the insights and innovations presented in this paper are likely to inspire further advancements in this area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
DeblurGS: Gaussian Splatting for Camera Motion Blur
Jeongtaek Oh, Jaeyoung Chung, Dongwoo Lee, Kyoung Mu Lee
0
0
Although significant progress has been made in reconstructing sharp 3D scenes from motion-blurred images, a transition to real-world applications remains challenging. The primary obstacle stems from the severe blur which leads to inaccuracies in the acquisition of initial camera poses through Structure-from-Motion, a critical aspect often overlooked by previous approaches. To address this challenge, we propose DeblurGS, a method to optimize sharp 3D Gaussian Splatting from motion-blurred images, even with the noisy camera pose initialization. We restore a fine-grained sharp scene by leveraging the remarkable reconstruction capability of 3D Gaussian Splatting. Our approach estimates the 6-Degree-of-Freedom camera motion for each blurry observation and synthesizes corresponding blurry renderings for the optimization process. Furthermore, we propose Gaussian Densification Annealing strategy to prevent the generation of inaccurate Gaussians at erroneous locations during the early training stages when camera motion is still imprecise. Comprehensive experiments demonstrate that our DeblurGS achieves state-of-the-art performance in deblurring and novel view synthesis for real-world and synthetic benchmark datasets, as well as field-captured blurry smartphone videos.
4/19/2024

Gaussian Splatting on the Move: Blur and Rolling Shutter Compensation for Natural Camera Motion
Otto Seiskari, Jerry Ylilammi, Valtteri Kaatrasalo, Pekka Rantalankila, Matias Turkulainen, Juho Kannala, Arno Solin
0
0
High-quality scene reconstruction and novel view synthesis based on Gaussian Splatting (3DGS) typically require steady, high-quality photographs, often impractical to capture with handheld cameras. We present a method that adapts to camera motion and allows high-quality scene reconstruction with handheld video data suffering from motion blur and rolling shutter distortion. Our approach is based on detailed modelling of the physical image formation process and utilizes velocities estimated using visual-inertial odometry (VIO). Camera poses are considered non-static during the exposure time of a single image frame and camera poses are further optimized in the reconstruction process. We formulate a differentiable rendering pipeline that leverages screen space approximation to efficiently incorporate rolling-shutter and motion blur effects into the 3DGS framework. Our results with both synthetic and real data demonstrate superior performance in mitigating camera motion over existing methods, thereby advancing 3DGS in naturalistic settings.
5/27/2024
Gaussian Splatting SLAM
Hidenobu Matsuki, Riku Murai, Paul H. J. Kelly, Andrew J. Davison
0
0
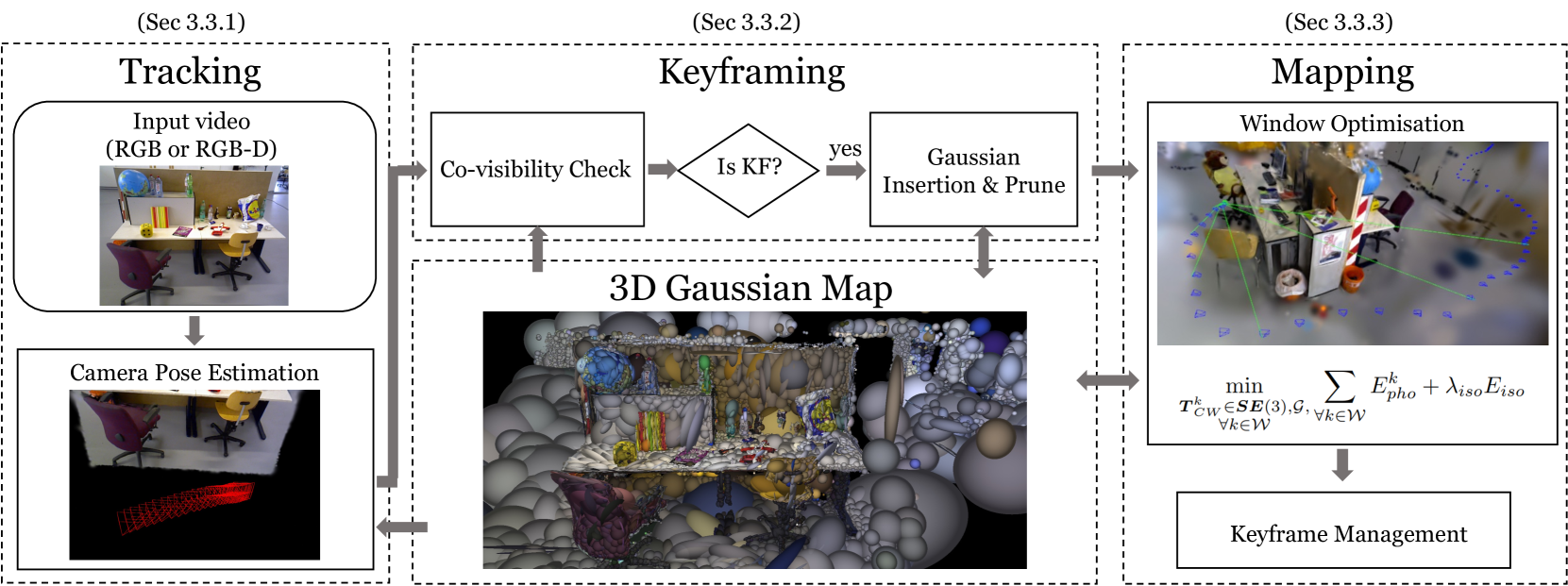
We present the first application of 3D Gaussian Splatting in monocular SLAM, the most fundamental but the hardest setup for Visual SLAM. Our method, which runs live at 3fps, utilises Gaussians as the only 3D representation, unifying the required representation for accurate, efficient tracking, mapping, and high-quality rendering. Designed for challenging monocular settings, our approach is seamlessly extendable to RGB-D SLAM when an external depth sensor is available. Several innovations are required to continuously reconstruct 3D scenes with high fidelity from a live camera. First, to move beyond the original 3DGS algorithm, which requires accurate poses from an offline Structure from Motion (SfM) system, we formulate camera tracking for 3DGS using direct optimisation against the 3D Gaussians, and show that this enables fast and robust tracking with a wide basin of convergence. Second, by utilising the explicit nature of the Gaussians, we introduce geometric verification and regularisation to handle the ambiguities occurring in incremental 3D dense reconstruction. Finally, we introduce a full SLAM system which not only achieves state-of-the-art results in novel view synthesis and trajectory estimation but also reconstruction of tiny and even transparent objects.
4/16/2024
Deblurring 3D Gaussian Splatting
Byeonghyeon Lee, Howoong Lee, Xiangyu Sun, Usman Ali, Eunbyung Park
0
0
Recent studies in Radiance Fields have paved the robust way for novel view synthesis with their photorealistic rendering quality. Nevertheless, they usually employ neural networks and volumetric rendering, which are costly to train and impede their broad use in various real-time applications due to the lengthy rendering time. Lately 3D Gaussians splatting-based approach has been proposed to model the 3D scene, and it achieves remarkable visual quality while rendering the images in real-time. However, it suffers from severe degradation in the rendering quality if the training images are blurry. Blurriness commonly occurs due to the lens defocusing, object motion, and camera shake, and it inevitably intervenes in clean image acquisition. Several previous studies have attempted to render clean and sharp images from blurry input images using neural fields. The majority of those works, however, are designed only for volumetric rendering-based neural radiance fields and are not straightforwardly applicable to rasterization-based 3D Gaussian splatting methods. Thus, we propose a novel real-time deblurring framework, Deblurring 3D Gaussian Splatting, using a small Multi-Layer Perceptron (MLP) that manipulates the covariance of each 3D Gaussian to model the scene blurriness. While Deblurring 3D Gaussian Splatting can still enjoy real-time rendering, it can reconstruct fine and sharp details from blurry images. A variety of experiments have been conducted on the benchmark, and the results have revealed the effectiveness of our approach for deblurring. Qualitative results are available at https://benhenryl.github.io/Deblurring-3D-Gaussian-Splatting/
5/28/2024