Robust Long-Range Perception Against Sensor Misalignment in Autonomous Vehicles

0
Sign in to get full access
Overview
- Autonomous vehicles rely on robust long-range perception to navigate safely
- Sensor misalignment can degrade performance of perception systems
- This paper proposes methods to make long-range perception more robust to sensor misalignment
Plain English Explanation
Self-driving cars use various sensors, like cameras and radars, to perceive the world around them. For these vehicles to navigate safely, they need reliable information about objects at long distances. However, the sensors can become misaligned over time, causing the perception system to make errors.
This research paper introduces techniques to make the long-range perception capabilities of self-driving cars more robust to sensor misalignment. The key ideas include:
- Adapting object detection models to be more resilient to sensor misalignment
- Developing recalibration methods to correct for sensor misalignment
- Fusing sensor data in an asynchronous way to improve robustness
By making perception systems more resilient to sensor issues, this work aims to improve the reliability and safety of autonomous vehicles operating in the real world.
Technical Explanation
The paper first discusses prior research on robust long-range perception and sensor fusion for autonomous vehicles. This includes work on object detection, sensor recalibration, and asynchronous sensor fusion.
The authors then propose several novel techniques to improve long-range perception robustness:
- An object detection model that is adapted to be more resilient to sensor misalignment through data augmentation and architectural changes.
- A sensor recalibration method that can correct for misalignment without requiring ground truth labels.
- An asynchronous sensor fusion approach that fuses camera and radar data in a way that is robust to timing offsets between the sensors.
The paper evaluates these methods on real-world autonomous driving datasets and shows significant improvements in long-range perception performance under sensor misalignment conditions compared to baseline approaches.
Critical Analysis
The paper provides a comprehensive set of techniques to address the important challenge of sensor misalignment in autonomous vehicle perception. The proposed methods are well-motivated and the experimental results demonstrate their effectiveness.
One potential limitation is that the paper does not extensively explore the tradeoffs and failure modes of the different techniques. For example, it's unclear how the recalibration method performs under extreme levels of sensor misalignment or how the asynchronous fusion approach handles very large timing offsets between sensors.
Additionally, the paper focuses on improving robustness to misalignment, but does not address other potential sources of perception errors, such as environmental conditions or occlusions. Combining these robustness approaches with other techniques for 3D object detection could lead to even more reliable long-range perception.
Overall, this work represents an important step forward in making autonomous vehicle perception systems more reliable and safe in the real world.
Conclusion
This research paper presents novel methods to improve the robustness of long-range perception in autonomous vehicles against sensor misalignment. By adapting object detection models, developing recalibration techniques, and using asynchronous sensor fusion, the authors demonstrate significant performance gains over baseline approaches.
These techniques could help make self-driving cars more reliable and safe as they navigate complex real-world environments. Further research is needed to explore the full scope of robustness challenges and integrate these solutions with other perception advancements.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Robust Long-Range Perception Against Sensor Misalignment in Autonomous Vehicles
Zi-Xiang Xia, Sudeep Fadadu, Yi Shi, Louis Foucard
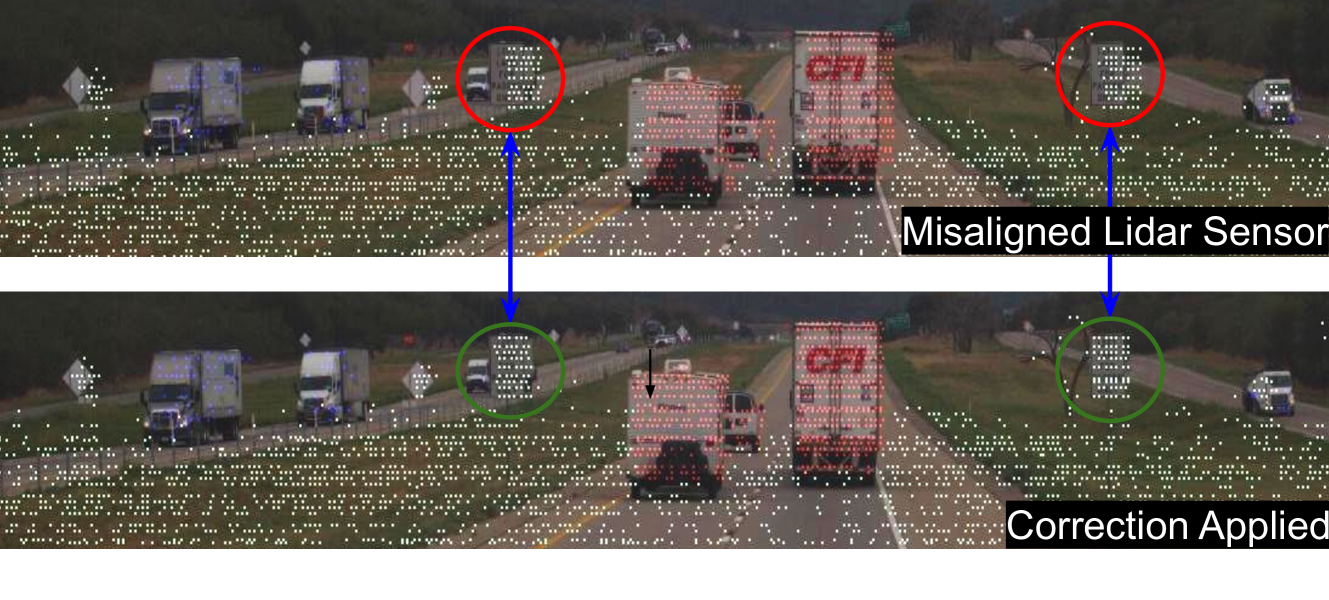
Advances in machine learning algorithms for sensor fusion have significantly improved the detection and prediction of other road users, thereby enhancing safety. However, even a small angular displacement in the sensor's placement can cause significant degradation in output, especially at long range. In this paper, we demonstrate a simple yet generic and efficient multi-task learning approach that not only detects misalignment between different sensor modalities but is also robust against them for long-range perception. Along with the amount of misalignment, our method also predicts calibrated uncertainty, which can be useful for filtering and fusing predicted misalignment values over time. In addition, we show that the predicted misalignment parameters can be used for self-correcting input sensor data, further improving the perception performance under sensor misalignment.
Read more9/12/2024
🔎
0
Towards Long-Range 3D Object Detection for Autonomous Vehicles
Ajinkya Khoche, Laura Pereira S'anchez, Nazre Batool, Sina Sharif Mansouri, Patric Jensfelt
3D object detection at long range is crucial for ensuring the safety and efficiency of self driving vehicles, allowing them to accurately perceive and react to objects, obstacles, and potential hazards from a distance. But most current state of the art LiDAR based methods are range limited due to sparsity at long range, which generates a form of domain gap between points closer to and farther away from the ego vehicle. Another related problem is the label imbalance for faraway objects, which inhibits the performance of Deep Neural Networks at long range. To address the above limitations, we investigate two ways to improve long range performance of current LiDAR based 3D detectors. First, we combine two 3D detection networks, referred to as range experts, one specializing at near to mid range objects, and one at long range 3D detection. To train a detector at long range under a scarce label regime, we further weigh the loss according to the labelled point's distance from ego vehicle. Second, we augment LiDAR scans with virtual points generated using Multimodal Virtual Points (MVP), a readily available image-based depth completion algorithm. Our experiments on the long range Argoverse2 (AV2) dataset indicate that MVP is more effective in improving long range performance, while maintaining a straightforward implementation. On the other hand, the range experts offer a computationally efficient and simpler alternative, avoiding dependency on image-based segmentation networks and perfect camera-LiDAR calibration.
Read more5/22/2024

0
A re-calibration method for object detection with multi-modal alignment bias in autonomous driving
Zhihang Song, Lihui Peng, Jianming Hu, Danya Yao, Yi Zhang
Multi-modal object detection in autonomous driving has achieved great breakthroughs due to the usage of fusing complementary information from different sensors. The calibration in fusion between sensors such as LiDAR and camera is always supposed to be precise in previous work. However, in reality, calibration matrices are fixed when the vehicles leave the factory, but vibration, bumps, and data lags may cause calibration bias. As the research on the calibration influence on fusion detection performance is relatively few, flexible calibration dependency multi-sensor detection method has always been attractive. In this paper, we conducted experiments on SOTA detection method EPNet++ and proved slight bias on calibration can reduce the performance seriously. We also proposed a re-calibration model based on semantic segmentation which can be combined with a detection algorithm to improve the performance and robustness of multi-modal calibration bias.
Read more5/28/2024

0
Velocity Driven Vision: Asynchronous Sensor Fusion Birds Eye View Models for Autonomous Vehicles
Seamie Hayes, Sushil Sharma, Ciar'an Eising
Fusing different sensor modalities can be a difficult task, particularly if they are asynchronous. Asynchronisation may arise due to long processing times or improper synchronisation during calibration, and there must exist a way to still utilise this previous information for the purpose of safe driving, and object detection in ego vehicle/ multi-agent trajectory prediction. Difficulties arise in the fact that the sensor modalities have captured information at different times and also at different positions in space. Therefore, they are not spatially nor temporally aligned. This paper will investigate the challenge of radar and LiDAR sensors being asynchronous relative to the camera sensors, for various time latencies. The spatial alignment will be resolved before lifting into BEV space via the transformation of the radar/LiDAR point clouds into the new ego frame coordinate system. Only after this can we concatenate the radar/LiDAR point cloud and lifted camera features. Temporal alignment will be remedied for radar data only, we will implement a novel method of inferring the future radar point positions using the velocity information. Our approach to resolving the issue of sensor asynchrony yields promising results. We demonstrate velocity information can drastically improve IoU for asynchronous datasets, as for a time latency of 360 milliseconds (ms), IoU improves from 49.54 to 53.63. Additionally, for a time latency of 550ms, the camera+radar (C+R) model outperforms the camera+LiDAR (C+L) model by 0.18 IoU. This is an advancement in utilising the often-neglected radar sensor modality, which is less favoured than LiDAR for autonomous driving purposes.
Read more7/25/2024