Robust Pivoting Manipulation using Contact Implicit Bilevel Optimization

0
🛠️
Sign in to get full access
Overview
- Robots must be able to interact with novel objects and environments to perform generalizable manipulation tasks.
- This is extremely challenging as robots need to reason about complex frictional interactions with uncertain physical properties.
- This paper studies robust optimization for planning pivoting manipulation under uncertainty.
- The authors present insights on how friction can compensate for inaccuracies in physical property estimates during manipulation.
- They derive analytical expressions for the stability margin provided by friction and use this in a Contact Implicit Bilevel Optimization (CIBO) framework to optimize trajectories that are robust to uncertainty.
Plain English Explanation
The key challenge in robot manipulation is that robots need to be able to interact with all kinds of new objects and environments, not just ones they've been specifically trained on. This is very difficult because the robot has to reason about complex frictional interactions and uncertain physical properties like the weight and texture of the object.
In this paper, the researchers look at how robots can use friction to their advantage during a specific type of manipulation called "pivoting." They've developed a way for the robot to calculate how much "stability margin" it has from the friction, and then use that to plan movements that are robust to uncertainties in the object's properties.
The researchers show that their approach works well for a 6-armed robot manipulating different objects, and they also designed a controller that can track and control the object's position during the manipulation.
Technical Explanation
The paper presents a framework for planning robust pivoting manipulation in the presence of uncertainty in the physical properties of the object and environment. The key technical contributions are:
-
Analytical Expressions for Friction Stability Margin: The authors derive analytical expressions to quantify the stability margin provided by friction during pivoting manipulation. This margin indicates how much uncertainty in the physical parameters the robot can tolerate while still maintaining stable manipulation.
-
Contact Implicit Bilevel Optimization (CIBO): The authors use the friction stability margin as an objective in a CIBO framework to optimize manipulation trajectories that are robust to parameter uncertainties. CIBO allows optimizing the trajectory while reasoning about the resulting contact forces and constraints.
-
Manipulation Experiments: The proposed method is validated on a 6 DoF robotic manipulator performing pivoting tasks with various objects. An MPC controller is also designed to track and regulate the object's position during manipulation.
The key insight is that by reasoning about and exploiting frictional effects, the robot can compensate for inaccuracies in its estimates of the object's physical properties, enabling more robust and generalizable manipulation capabilities.
Critical Analysis
The paper makes important theoretical and experimental contributions towards robust manipulation planning. However, a few limitations and potential areas for future work are:
-
The analytical friction stability margin expressions are derived under specific assumptions that may not always hold in practice, e.g. quasi-static motion, uniform friction. Relaxing these assumptions could enhance the model's applicability.
-
The experiments are limited to pivoting manipulation - extending the approach to a wider range of manipulation primitives would demonstrate its broader applicability.
-
The proposed method assumes the robot has accurate estimates of the object's initial state. Incorporating state estimation uncertainty could make the approach more robust.
-
While the MPC controller can regulate the object's position, incorporating feedback from tactile or vision sensors could further improve tracking performance.
Overall, this work provides valuable insights on leveraging frictional effects for robust manipulation, but continued research is needed to address the limitations and enhance the practicality of the approach.
Conclusion
This paper presents a novel framework for planning robust pivoting manipulation in the presence of uncertainty. By deriving analytical expressions for the stability margin provided by friction and using this in a bilevel optimization scheme, the approach can generate manipulation trajectories that are resilient to inaccuracies in the estimated physical properties of the object and environment.
The experimental validation on a 6 DoF robotic manipulator manipulating various objects demonstrates the effectiveness of the proposed method. This research represents an important step towards enabling generalizable manipulation capabilities in robots, which is a crucial requirement for their widespread adoption in real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🛠️
0
Robust Pivoting Manipulation using Contact Implicit Bilevel Optimization
Yuki Shirai, Devesh K. Jha, Arvind U. Raghunathan
Generalizable manipulation requires that robots be able to interact with novel objects and environment. This requirement makes manipulation extremely challenging as a robot has to reason about complex frictional interactions with uncertainty in physical properties of the object and the environment. In this paper, we study robust optimization for planning of pivoting manipulation in the presence of uncertainties. We present insights about how friction can be exploited to compensate for inaccuracies in the estimates of the physical properties during manipulation. Under certain assumptions, we derive analytical expressions for stability margin provided by friction during pivoting manipulation. This margin is then used in a Contact Implicit Bilevel Optimization (CIBO) framework to optimize a trajectory that maximizes this stability margin to provide robustness against uncertainty in several physical parameters of the object. We present analysis of the stability margin with respect to several parameters involved in the underlying bilevel optimization problem. We demonstrate our proposed method using a 6 DoF manipulator for manipulating several different objects. We also design and validate an MPC controller using the proposed algorithm which can track and regulate the position of the object during manipulation.
Read more7/8/2024
🔗
0
Manipulability maximization in constrained inverse kinematics of surgical robots
Jacinto Colan, Ana Davila, Yasuhisa Hasegawa
In robot-assisted minimally invasive surgery (RMIS), inverse kinematics (IK) must satisfy a remote center of motion (RCM) constraint to prevent tissue damage at the incision point. However, most of existing IK methods do not account for the trade-offs between the RCM constraint and other objectives such as joint limits, task performance and manipulability optimization. This paper presents a novel method for manipulability maximization in constrained IK of surgical robots, which optimizes the robot's dexterity while respecting the RCM constraint and joint limits. Our method uses a hierarchical quadratic programming (HQP) framework that solves a series of quadratic programs with different priority levels. We evaluate our method in simulation on a 6D path tracking task for constrained and unconstrained IK scenarios for redundant kinematic chains. Our results show that our method enhances the manipulability index for all cases, with an important increase of more than 100% when a large number of degrees of freedom are available. The average computation time for solving the IK problems was under 1ms, making it suitable for real-time robot control. Our method offers a novel and effective solution to the constrained IK problem in RMIS applications.
Read more6/17/2024

0
Planning for Robust Open-loop Pushing: Exploiting Quasi-static Belief Dynamics and Contact-informed Optimization
Julius Jankowski, Lara Brudermuller, Nick Hawes, Sylvain Calinon
Non-prehensile manipulation such as pushing is typically subject to uncertain, non-smooth dynamics. However, modeling the uncertainty of the dynamics typically results in intractable belief dynamics, making data-efficient planning under uncertainty difficult. This article focuses on the problem of efficiently generating robust open-loop pushing plans. First, we investigate how the belief over object configurations propagates through quasi-static contact dynamics. We exploit the simplified dynamics to predict the variance of the object configuration without sampling from a perturbation distribution. In a sampling-based trajectory optimization algorithm, the gain of the variance is constrained in order to enforce robustness of the plan. Second, we propose an informed trajectory sampling mechanism for drawing robot trajectories that are likely to make contact with the object. This sampling mechanism is shown to significantly improve chances of finding robust solutions, especially when making-and-breaking contacts is required. We demonstrate that the proposed approach is able to synthesize bi-manual pushing trajectories, resulting in successful long-horizon pushing maneuvers without exteroceptive feedback such as vision or tactile feedback. We furthermore deploy the proposed approach in a model-predictive control scheme, demonstrating additional robustness against unmodeled perturbations.
Read more6/28/2024
0
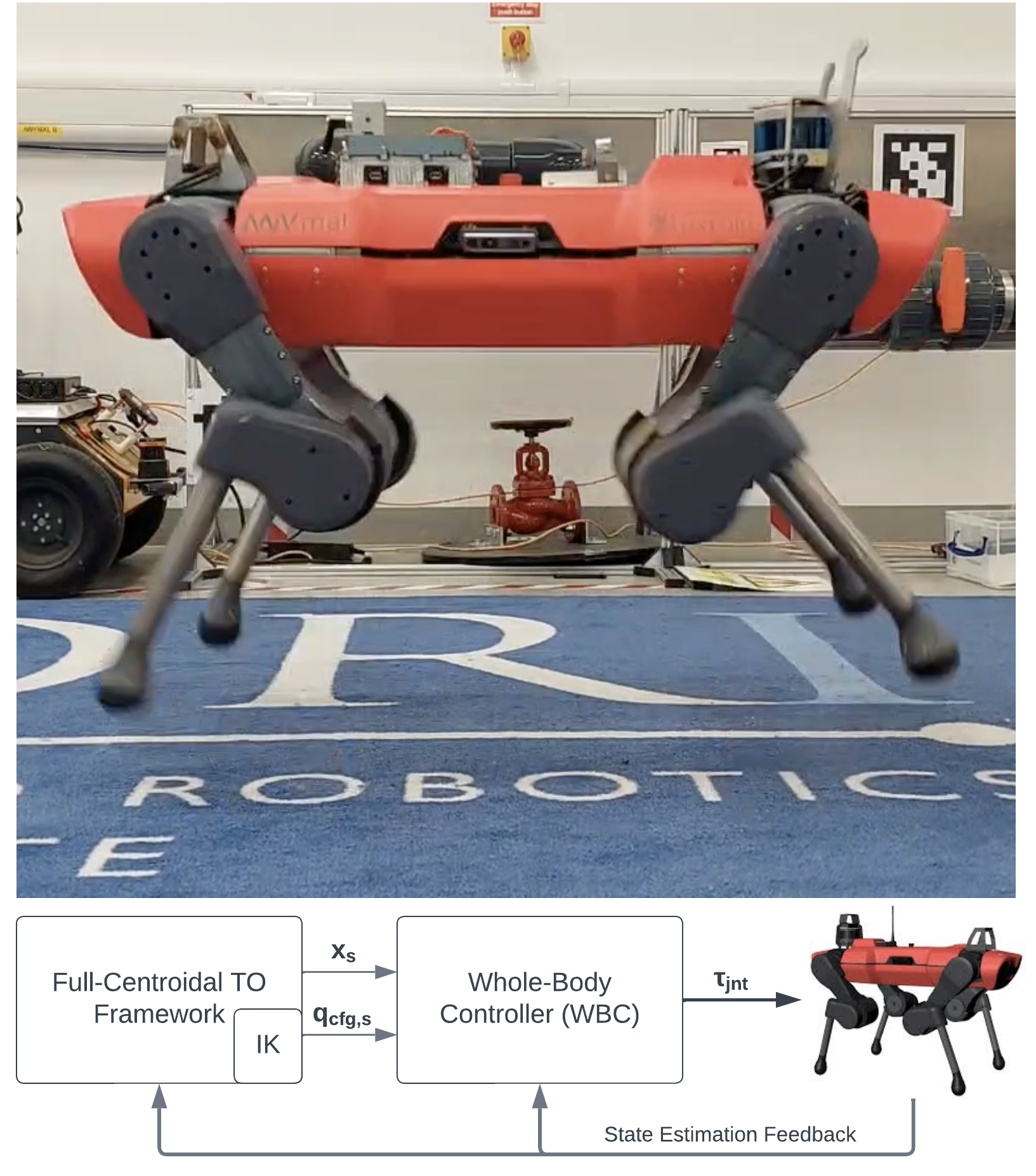
Momentum-Aware Trajectory Optimisation using Full-Centroidal Dynamics and Implicit Inverse Kinematics
Aristotelis Papatheodorou, Wolfgang Merkt, Alexander L. Mitchell, Ioannis Havoutis
The current state-of-the-art gradient-based optimisation frameworks are able to produce impressive dynamic manoeuvres such as linear and rotational jumps. However, these methods, which optimise over the full rigid-body dynamics of the robot, often require precise foothold locations apriori, while real-time performance is not guaranteed without elaborate regularisation and tuning of the cost function. In contrast, we investigate the advantages of a task-space optimisation framework, with special focus on acrobatic motions. Our proposed formulation exploits the system's high-order nonlinearities, such as the nonholonomy of the angular momentum, in order to produce feasible, high-acceleration manoeuvres. By leveraging the full-centroidal dynamics of the quadruped ANYmal C and directly optimising its footholds and contact forces, the framework is capable of producing efficient motion plans with low computational overhead. Finally, we deploy our proposed framework on the ANYmal C platform, and demonstrate its true capabilities through real-world experiments, with the successful execution of high-acceleration motions, such as linear and rotational jumps. Extensive analysis of these shows that the robot's dynamics can be exploited to surpass its hardware limitations of having a high mass and low-torque limits.
Read more9/14/2024