Safe by Design Autonomous Driving Systems
2405.11995
0
0
✅
Abstract
Developing safe autonomous driving systems is a major scientific and technical challenge. Existing AI-based end-to-end solutions do not offer the necessary safety guarantees, while traditional systems engineering approaches are defeated by the complexity of the problem. Currently, there is an increasing interest in hybrid design solutions, integrating machine learning components, when necessary, while using model-based components for goal management and planning. We study a method for building safe by design autonomous driving systems, based on the assumption that the capability to drive boils down to the coordinated execution of a given set of driving operations. The assumption is substantiated by a compositionality result considering that autopilots are dynamic systems receiving a small number of types of vistas as input, each vista defining a free space in its neighborhood. It is shown that safe driving for each type of vista in the corresponding free space, implies safe driving for any possible scenario under some easy-to-check conditions concerning the transition between vistas. The designed autopilot comprises distinct control policies one per type of vista, articulated in two consecutive phases. The first phase consists of carefully managing a potentially risky situation by virtually reducing speed, while the second phase consists of exiting the situation by accelerating. The autopilots designed use for their predictions simple functions characterizing the acceleration and deceleration capabilities of the vehicles. They cover the main driving operations, including entering a main road, overtaking, crossing intersections protected by traffic lights or signals, and driving on freeways. The results presented reinforce the case for hybrid solutions that incorporate mathematically elegant and robust decision methods that are safe by design.
Create account to get full access
Overview
- The paper discusses the challenge of developing safe autonomous driving systems, as existing AI-based solutions do not offer the necessary safety guarantees, while traditional engineering approaches are hindered by the problem's complexity.
- The authors propose a method for building safe-by-design autonomous driving systems, based on the assumption that the capability to drive can be broken down into a set of coordinated driving operations.
- The autopilot system they design uses simple functions to characterize the acceleration and deceleration capabilities of vehicles, and includes distinct control policies for different types of driving situations.
Plain English Explanation
The paper focuses on the challenge of creating autonomous driving systems that are truly safe. Existing AI-based solutions, where the car is trained to drive entirely through machine learning, don't provide enough guarantees of safety. On the other hand, traditional engineering approaches, where the system is built piece-by-piece, struggle to handle the sheer complexity of driving.
The researchers propose a new approach that combines the best of both worlds. They start from the idea that driving can be broken down into a set of basic maneuvers, like entering a main road, overtaking, or crossing an intersection. For each of these maneuvers, they design a specific control policy that the car can use.
These control policies use simple functions to model the car's acceleration and braking capabilities, rather than relying on complex machine learning models. The key is that by designing the system this way, the researchers can prove that as long as each individual maneuver is safe, the overall driving behavior will also be safe, under certain conditions.
This hybrid approach, integrating machine learning components where needed while using model-based methods for high-level decision making, is presented as a promising way to build autonomous driving systems that are both capable and safe by design.
Technical Explanation
The paper proposes a method for building safe-by-design autonomous driving systems, based on the assumption that the capability to drive can be broken down into the coordinated execution of a set of driving operations.
This assumption is supported by a compositionality result, which shows that as long as the system can safely execute each individual driving operation (e.g., entering a main road, overtaking, crossing an intersection) in the corresponding free space, then the overall driving behavior will be safe under some easy-to-check conditions regarding the transitions between these operations.
The designed autopilot system comprises distinct control policies, one for each type of driving situation. These policies are articulated in two phases: first, carefully managing potentially risky situations by virtually reducing the vehicle's speed, and then exiting the situation by accelerating.
The autopilot's predictions are based on simple functions that characterize the vehicle's acceleration and deceleration capabilities, rather than complex machine learning models. The system covers the main driving operations, including entering a main road, overtaking, crossing intersections, and driving on freeways.
The authors argue that this hybrid approach, which incorporates mathematically elegant and robust decision methods that are safe by design, is a promising way to address the challenges of building safe autonomous driving systems.
Critical Analysis
The paper presents a thoughtful approach to addressing the safety challenges of autonomous driving, but it also acknowledges some potential limitations and areas for further research.
One key caveat is that the compositionality result, which is central to the proposed method, relies on certain assumptions and conditions being met. The authors state that these conditions need to be "easy to check," but it's not entirely clear how straightforward this would be in practice, especially for more complex driving scenarios.
Additionally, the paper focuses primarily on the high-level decision-making and control aspects of the autonomous driving system, without delving into the details of how the perception, prediction, and planning components would be implemented. These lower-level aspects are also crucial for ensuring overall system safety.
While the hybrid approach proposed in the paper is promising, it's important to note that fully end-to-end autonomous driving systems may offer unique advantages, such as the ability to learn and adapt to complex, real-world driving situations in ways that are difficult to capture with model-based methods.
Overall, the paper presents a valuable contribution to the ongoing efforts to develop safe and reliable autonomous driving systems, but further research and validation will be necessary to fully assess the feasibility and scalability of the proposed approach.
Conclusion
This paper introduces a novel method for building safe-by-design autonomous driving systems, based on the assumption that driving can be broken down into a set of coordinated driving operations. The proposed hybrid approach, which integrates machine learning components with model-based control policies, aims to offer the necessary safety guarantees that are lacking in existing AI-based solutions, while overcoming the complexity issues of traditional engineering approaches.
The key innovation is the use of simple functions to characterize the vehicle's acceleration and deceleration capabilities, rather than relying on complex machine learning models. This allows the researchers to prove that as long as each individual driving maneuver is safe, the overall driving behavior will also be safe, under certain conditions.
While the paper presents a promising direction for autonomous driving research, it also acknowledges potential limitations and areas for further investigation, such as the practical feasibility of verifying the necessary conditions for compositionality and the integration of lower-level perception and planning components.
Overall, the proposed method represents an important step towards the development of safe and reliable autonomous driving systems that can navigate the complex realities of the real world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤿
Redefining Safety for Autonomous Vehicles
Philip Koopman, William Widen
0
0
Existing definitions and associated conceptual frameworks for computer-based system safety should be revisited in light of real-world experiences from deploying autonomous vehicles. Current terminology used by industry safety standards emphasizes mitigation of risk from specifically identified hazards, and carries assumptions based on human-supervised vehicle operation. Operation without a human driver dramatically increases the scope of safety concerns, especially due to operation in an open world environment, a requirement to self-enforce operational limits, participation in an ad hoc sociotechnical system of systems, and a requirement to conform to both legal and ethical constraints. Existing standards and terminology only partially address these new challenges. We propose updated definitions for core system safety concepts that encompass these additional considerations as a starting point for evolving safe-ty approaches to address these additional safety challenges. These results might additionally inform framing safety terminology for other autonomous system applications.
5/29/2024
🤖
New!Explainable AI for Safe and Trustworthy Autonomous Driving: A Systematic Review
Anton Kuznietsov, Balint Gyevnar, Cheng Wang, Steven Peters, Stefano V. Albrecht
0
0
Artificial Intelligence (AI) shows promising applications for the perception and planning tasks in autonomous driving (AD) due to its superior performance compared to conventional methods. However, inscrutable AI systems exacerbate the existing challenge of safety assurance of AD. One way to mitigate this challenge is to utilize explainable AI (XAI) techniques. To this end, we present the first comprehensive systematic literature review of explainable methods for safe and trustworthy AD. We begin by analyzing the requirements for AI in the context of AD, focusing on three key aspects: data, model, and agency. We find that XAI is fundamental to meeting these requirements. Based on this, we explain the sources of explanations in AI and describe a taxonomy of XAI. We then identify five key contributions of XAI for safe and trustworthy AI in AD, which are interpretable design, interpretable surrogate models, interpretable monitoring, auxiliary explanations, and interpretable validation. Finally, we propose a modular framework called SafeX to integrate these contributions, enabling explanation delivery to users while simultaneously ensuring the safety of AI models.
7/4/2024
Towards Guaranteed Safe AI: A Framework for Ensuring Robust and Reliable AI Systems
David davidad Dalrymple, Joar Skalse, Yoshua Bengio, Stuart Russell, Max Tegmark, Sanjit Seshia, Steve Omohundro, Christian Szegedy, Ben Goldhaber, Nora Ammann, Alessandro Abate, Joe Halpern, Clark Barrett, Ding Zhao, Tan Zhi-Xuan, Jeannette Wing, Joshua Tenenbaum
0
0
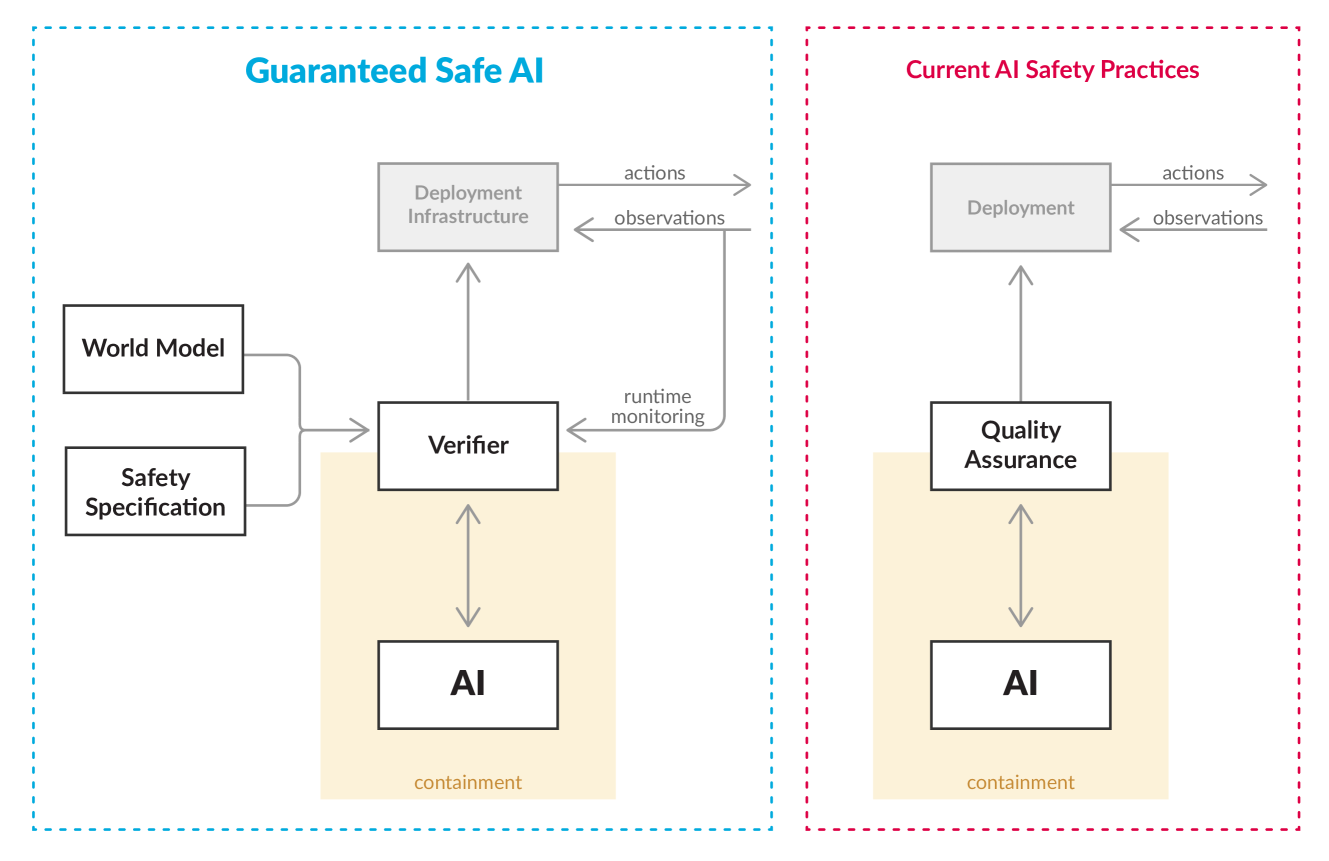
Ensuring that AI systems reliably and robustly avoid harmful or dangerous behaviours is a crucial challenge, especially for AI systems with a high degree of autonomy and general intelligence, or systems used in safety-critical contexts. In this paper, we will introduce and define a family of approaches to AI safety, which we will refer to as guaranteed safe (GS) AI. The core feature of these approaches is that they aim to produce AI systems which are equipped with high-assurance quantitative safety guarantees. This is achieved by the interplay of three core components: a world model (which provides a mathematical description of how the AI system affects the outside world), a safety specification (which is a mathematical description of what effects are acceptable), and a verifier (which provides an auditable proof certificate that the AI satisfies the safety specification relative to the world model). We outline a number of approaches for creating each of these three core components, describe the main technical challenges, and suggest a number of potential solutions to them. We also argue for the necessity of this approach to AI safety, and for the inadequacy of the main alternative approaches.
5/20/2024
📈
Explainable Artificial Intelligence for Autonomous Driving: A Comprehensive Overview and Field Guide for Future Research Directions
Shahin Atakishiyev, Mohammad Salameh, Hengshuai Yao, Randy Goebel
0
0
Autonomous driving has achieved significant milestones in research and development over the last two decades. There is increasing interest in the field as the deployment of autonomous vehicles (AVs) promises safer and more ecologically friendly transportation systems. With the rapid progress in computationally powerful artificial intelligence (AI) techniques, AVs can sense their environment with high precision, make safe real-time decisions, and operate reliably without human intervention. However, intelligent decision-making in such vehicles is not generally understandable by humans in the current state of the art, and such deficiency hinders this technology from being socially acceptable. Hence, aside from making safe real-time decisions, AVs must also explain their AI-guided decision-making process in order to be regulatory compliant across many jurisdictions. Our study sheds comprehensive light on the development of explainable artificial intelligence (XAI) approaches for AVs. In particular, we make the following contributions. First, we provide a thorough overview of the state-of-the-art and emerging approaches for XAI-based autonomous driving. We then propose a conceptual framework that considers the essential elements for explainable end-to-end autonomous driving. Finally, we present XAI-based prospective directions and emerging paradigms for future directions that hold promise for enhancing transparency, trustworthiness, and societal acceptance of AVs.
4/29/2024