Redefining Safety for Autonomous Vehicles
2404.16768
0
0
🤿
Abstract
Existing definitions and associated conceptual frameworks for computer-based system safety should be revisited in light of real-world experiences from deploying autonomous vehicles. Current terminology used by industry safety standards emphasizes mitigation of risk from specifically identified hazards, and carries assumptions based on human-supervised vehicle operation. Operation without a human driver dramatically increases the scope of safety concerns, especially due to operation in an open world environment, a requirement to self-enforce operational limits, participation in an ad hoc sociotechnical system of systems, and a requirement to conform to both legal and ethical constraints. Existing standards and terminology only partially address these new challenges. We propose updated definitions for core system safety concepts that encompass these additional considerations as a starting point for evolving safe-ty approaches to address these additional safety challenges. These results might additionally inform framing safety terminology for other autonomous system applications.
Create account to get full access
Overview
- Current industry safety standards for autonomous vehicles are based on assumptions about human-supervised operation, which may not fully address the new safety challenges posed by self-driving cars.
- Key issues include operation in an open-world environment, the need for self-enforcement of operational limits, integration into a complex sociotechnical system, and conformance to both legal and ethical constraints.
- Existing safety frameworks and terminology only partially address these challenges, necessitating updated definitions and approaches.
Plain English Explanation
Safety standards for traditional, human-driven vehicles are not sufficient for fully autonomous vehicles. Autonomous vehicles operate very differently from human-driven cars, and this creates new safety concerns that current industry practices don't fully address.
For example, autonomous vehicles have to make decisions and navigate on their own, without a human driver to intervene. They operate in the real world, which is unpredictable, rather than in a controlled environment. Autonomous vehicles also have to follow both legal and ethical rules, which can be complex and sometimes conflicting.
Additionally, autonomous vehicles are part of a larger "system of systems" - they interact with other vehicles, infrastructure, and even pedestrians in an ad-hoc way. This interconnected nature adds another layer of safety considerations.
The current safety frameworks and terminology used by the industry were designed with human-driven vehicles in mind. They focus on identifying specific hazards and mitigating the associated risks. But this approach doesn't fully capture the safety challenges of autonomous vehicles. We need updated definitions and concepts that better reflect the unique safety requirements of self-driving cars.
Technical Explanation
The paper argues that existing definitions and conceptual frameworks for computer-based system safety need to be re-examined in light of the real-world experiences from deploying autonomous vehicles. Current industry safety standards and terminology emphasize the mitigation of risks from specifically identified hazards, based on the assumption of human-supervised vehicle operation.
However, the transition to operation without a human driver dramatically increases the scope of safety concerns. Key issues include:
- Operation in an open-world environment, rather than a controlled setting.
- The need for the vehicle to self-enforce its own operational limits, without human oversight.
- Participation in an ad-hoc sociotechnical "system of systems," with complex interactions between the vehicle, infrastructure, and other road users.
- Conformance to both legal and ethical constraints, which can be ambiguous or conflicting.
Existing safety standards and terminology only partially address these new challenges. The paper proposes updated definitions for core system safety concepts that encompass these additional considerations, as a starting point for evolving safety approaches to address the unique safety requirements of autonomous vehicles.
Critical Analysis
The paper raises valid concerns about the limitations of current safety frameworks for autonomous vehicles. The authors rightly point out that the transition from human-supervised to fully self-driving operation introduces a significant increase in the scope and complexity of safety considerations.
One potential limitation of the paper is that it does not provide detailed proposals for the updated safety definitions and concepts. The authors acknowledge this, stating that their work is intended as a starting point for evolving safety approaches. Further research and industry collaboration would be needed to develop a comprehensive, practical framework.
Additionally, the paper does not delve into the specific challenges of ensuring the safety of vulnerable road users in the context of autonomous vehicles. This is an important consideration that should be addressed in any new safety framework.
Overall, the paper makes a compelling case for the need to revisit existing safety approaches in light of the unique challenges posed by autonomous vehicles. The authors' call for updated definitions and concepts is a valuable contribution to the ongoing efforts to ensure the safe deployment of self-driving technologies.
Conclusion
This paper highlights the need to re-evaluate current industry safety standards and terminology for autonomous vehicles. The transition from human-supervised to fully self-driving operation introduces a range of new safety challenges, including operation in unpredictable open-world environments, self-enforcement of operational limits, integration into complex sociotechnical systems, and conformance to legal and ethical constraints.
The authors propose that updating the core definitions and conceptual frameworks for system safety is a necessary first step in developing new approaches to address these challenges. While the paper does not provide detailed solutions, it sets the stage for further research and industry collaboration to ensure the safe deployment of autonomous vehicles and other autonomous systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
✅
Safe by Design Autonomous Driving Systems
Marius Bozga, Joseph Sifakis
0
0
Developing safe autonomous driving systems is a major scientific and technical challenge. Existing AI-based end-to-end solutions do not offer the necessary safety guarantees, while traditional systems engineering approaches are defeated by the complexity of the problem. Currently, there is an increasing interest in hybrid design solutions, integrating machine learning components, when necessary, while using model-based components for goal management and planning. We study a method for building safe by design autonomous driving systems, based on the assumption that the capability to drive boils down to the coordinated execution of a given set of driving operations. The assumption is substantiated by a compositionality result considering that autopilots are dynamic systems receiving a small number of types of vistas as input, each vista defining a free space in its neighborhood. It is shown that safe driving for each type of vista in the corresponding free space, implies safe driving for any possible scenario under some easy-to-check conditions concerning the transition between vistas. The designed autopilot comprises distinct control policies one per type of vista, articulated in two consecutive phases. The first phase consists of carefully managing a potentially risky situation by virtually reducing speed, while the second phase consists of exiting the situation by accelerating. The autopilots designed use for their predictions simple functions characterizing the acceleration and deceleration capabilities of the vehicles. They cover the main driving operations, including entering a main road, overtaking, crossing intersections protected by traffic lights or signals, and driving on freeways. The results presented reinforce the case for hybrid solutions that incorporate mathematically elegant and robust decision methods that are safe by design.
5/21/2024
📉
The Open Autonomy Safety Case Framework
Michael Wagner, Carmen Carlan
0
0
A system safety case is a compelling, comprehensible, and valid argument about the satisfaction of the safety goals of a given system operating in a given environment supported by convincing evidence. Since the publication of UL 4600 in 2020, safety cases have become a best practice for measuring, managing, and communicating the safety of autonomous vehicles (AVs). Although UL 4600 provides guidance on how to build the safety case for an AV, the complexity of AVs and their operating environments, the novelty of the used technology, the need for complying with various regulations and technical standards, and for addressing cybersecurity concerns and ethical considerations make the development of safety cases for AVs challenging. To this end, safety case frameworks have been proposed that bring strategies, argument templates, and other guidance together to support the development of a safety case. This paper introduces the Open Autonomy Safety Case Framework, developed over years of work with the autonomous vehicle industry, as a roadmap for how AVs can be deployed safely and responsibly.
4/9/2024
Towards Guaranteed Safe AI: A Framework for Ensuring Robust and Reliable AI Systems
David davidad Dalrymple, Joar Skalse, Yoshua Bengio, Stuart Russell, Max Tegmark, Sanjit Seshia, Steve Omohundro, Christian Szegedy, Ben Goldhaber, Nora Ammann, Alessandro Abate, Joe Halpern, Clark Barrett, Ding Zhao, Tan Zhi-Xuan, Jeannette Wing, Joshua Tenenbaum
0
0
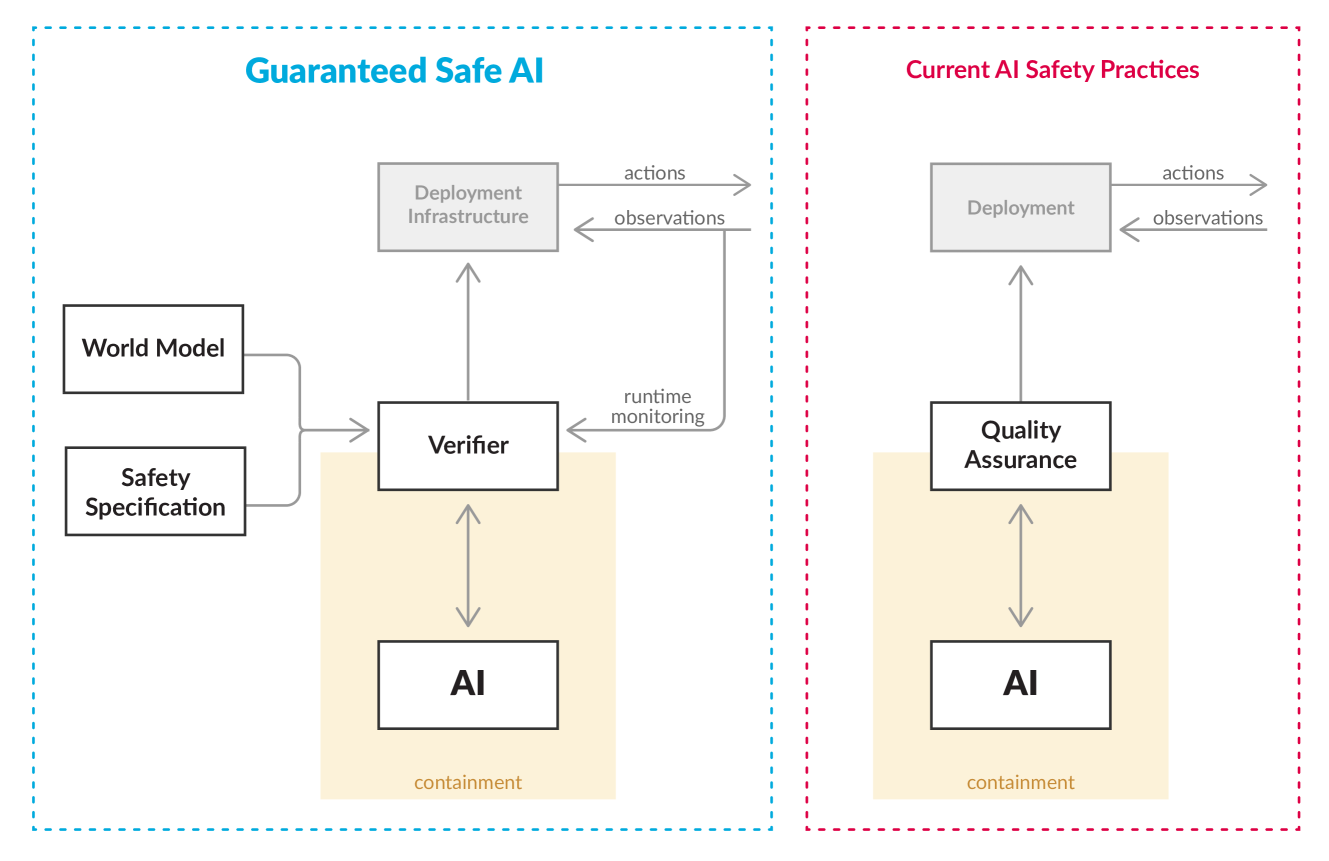
Ensuring that AI systems reliably and robustly avoid harmful or dangerous behaviours is a crucial challenge, especially for AI systems with a high degree of autonomy and general intelligence, or systems used in safety-critical contexts. In this paper, we will introduce and define a family of approaches to AI safety, which we will refer to as guaranteed safe (GS) AI. The core feature of these approaches is that they aim to produce AI systems which are equipped with high-assurance quantitative safety guarantees. This is achieved by the interplay of three core components: a world model (which provides a mathematical description of how the AI system affects the outside world), a safety specification (which is a mathematical description of what effects are acceptable), and a verifier (which provides an auditable proof certificate that the AI satisfies the safety specification relative to the world model). We outline a number of approaches for creating each of these three core components, describe the main technical challenges, and suggest a number of potential solutions to them. We also argue for the necessity of this approach to AI safety, and for the inadequacy of the main alternative approaches.
5/20/2024
🤖
SoK: On the Semantic AI Security in Autonomous Driving
Junjie Shen, Ningfei Wang, Ziwen Wan, Yunpeng Luo, Takami Sato, Zhisheng Hu, Xinyang Zhang, Shengjian Guo, Zhenyu Zhong, Kang Li, Ziming Zhao, Chunming Qiao, Qi Alfred Chen
0
0
Autonomous Driving (AD) systems rely on AI components to make safety and correct driving decisions. Unfortunately, today's AI algorithms are known to be generally vulnerable to adversarial attacks. However, for such AI component-level vulnerabilities to be semantically impactful at the system level, it needs to address non-trivial semantic gaps both (1) from the system-level attack input spaces to those at AI component level, and (2) from AI component-level attack impacts to those at the system level. In this paper, we define such research space as semantic AI security as opposed to generic AI security. Over the past 5 years, increasingly more research works are performed to tackle such semantic AI security challenges in AD context, which has started to show an exponential growth trend. In this paper, we perform the first systematization of knowledge of such growing semantic AD AI security research space. In total, we collect and analyze 53 such papers, and systematically taxonomize them based on research aspects critical for the security field. We summarize 6 most substantial scientific gaps observed based on quantitative comparisons both vertically among existing AD AI security works and horizontally with security works from closely-related domains. With these, we are able to provide insights and potential future directions not only at the design level, but also at the research goal, methodology, and community levels. To address the most critical scientific methodology-level gap, we take the initiative to develop an open-source, uniform, and extensible system-driven evaluation platform, named PASS, for the semantic AD AI security research community. We also use our implemented platform prototype to showcase the capabilities and benefits of such a platform using representative semantic AD AI attacks.
4/29/2024