Safe Control using Occupancy Grid Map-based Control Barrier Function (OGM-CBF)

0

Sign in to get full access
Overview
- This paper proposes a novel approach called the Occupancy Grid Map-based Control Barrier Function (OGM-CBF) for safe control and navigation of autonomous vehicles in dynamic environments.
- The method combines an occupancy grid map representation of the environment with a control barrier function (CBF) to ensure safe and collision-free navigation.
- The OGM-CBF approach is designed to address the challenge of navigating in complex, cluttered environments with moving obstacles.
Plain English Explanation
The paper introduces a new way for autonomous vehicles to safely navigate in dynamic environments with moving obstacles. The key idea is to combine two powerful techniques:
-
Occupancy Grid Maps: The vehicle builds a detailed map of its surroundings, representing the locations of obstacles as a grid. This gives the vehicle a comprehensive understanding of the environment.
-
Control Barrier Functions: These are mathematical functions that define a "safe" region around the vehicle, which it must stay within to avoid collisions. The vehicle can then plan its movements to keep within this safe region.
By using both of these techniques together in the "OGM-CBF" approach, the autonomous vehicle can plan a safe path through complex, cluttered environments with moving obstacles. The occupancy grid map allows the vehicle to be aware of its surroundings, while the control barrier function ensures it stays within a collision-free zone as it moves.
This combined approach is designed to improve the safety and reliability of autonomous vehicle navigation in real-world, dynamic settings - for example, navigating through a crowded city street with pedestrians and other vehicles moving around.
Technical Explanation
The paper presents the Occupancy Grid Map-based Control Barrier Function (OGM-CBF) method for safe control of autonomous vehicles in dynamic environments.
The approach first constructs an occupancy grid map (OGM) representation of the environment, which discretizes the surrounding space into a grid and tracks the occupancy state of each cell. This provides the vehicle with a comprehensive model of the static and dynamic obstacles in its vicinity.
The OGM is then used to define a control barrier function (CBF), which constrains the vehicle's motion to a safe region around its current position. The CBF is formulated such that it enforces collision avoidance by ensuring the vehicle always maintains a minimum distance from obstacles.
Finally, the vehicle's control inputs are optimized subject to the CBF constraint, allowing it to navigate through the environment while provably guaranteeing safety and collision avoidance. This is achieved by solving a quadratic program that minimizes a cost function (e.g., distance to goal) while satisfying the CBF condition.
The key advantages of the OGM-CBF method are its ability to handle complex, cluttered environments with dynamic obstacles, and its formal safety guarantees. By tightly integrating the OGM and CBF components, the approach can plan dynamically feasible and collision-free motions in real-time.
Critical Analysis
The paper presents a comprehensive and well-designed approach for safe autonomous navigation in dynamic environments. The integration of occupancy grid maps and control barrier functions is a novel and promising solution to the challenge of navigation in cluttered, unpredictable settings.
One potential limitation of the OGM-CBF method is its reliance on accurate and up-to-date sensor data to construct the occupancy grid map. In real-world scenarios, sensor data may be noisy or incomplete, which could lead to errors in the grid map and compromise the safety guarantees provided by the CBF. The authors acknowledge this issue and discuss the need for robust sensor fusion and mapping techniques to address it.
Additionally, the computational complexity of solving the quadratic program for control input optimization may limit the scalability of the approach, especially in highly dynamic environments with many obstacles. The authors mention that efficient optimization methods and hardware acceleration could help mitigate this concern, but further research may be needed to fully address the performance challenges.
Despite these potential limitations, the OGM-CBF method represents a significant advancement in the field of safe autonomous navigation. The integration of occupancy grid maps and control barrier functions is a promising direction, and the authors' rigorous approach to ensuring safety and collision avoidance is commendable. As the authors suggest, further research into robust sensor fusion, efficient optimization techniques, and extensions to more complex vehicle dynamics could further improve the practicality and applicability of the OGM-CBF method.
Conclusion
In summary, the Occupancy Grid Map-based Control Barrier Function (OGM-CBF) proposed in this paper is a novel and promising approach for safe control and navigation of autonomous vehicles in dynamic environments. By combining occupancy grid maps and control barrier functions, the method can plan collision-free motions while providing formal safety guarantees.
The key innovations of the OGM-CBF approach are its ability to handle complex, cluttered environments with moving obstacles, and its tight integration of the occupancy grid map and control barrier function components. While the method has some potential limitations, such as sensitivity to sensor noise and computational complexity, the authors' rigorous approach and the promising results suggest that the OGM-CBF could have significant impact on the field of autonomous navigation.
Further research into robust sensor fusion, efficient optimization techniques, and extensions to more complex vehicle dynamics could help address the current limitations and unlock the full potential of the OGM-CBF method. Overall, this paper represents an important contribution to the ongoing efforts to develop safe and reliable autonomous navigation systems for a wide range of real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Safe Control using Occupancy Grid Map-based Control Barrier Function (OGM-CBF)
Golnaz Raja, Teemu Mokkonen, Reza Ghabcheloo
Safe control in unknown environments is a significant challenge in robotics. While Control Barrier Functions (CBFs) are widely used to guarantee system safety, they often assume known environments with predefined obstacles. The proposed method constructs CBFs directly from perception sensor input and introduces a new first-order barrier function for a 3D kinematic robot motion model. The proposed CBF is constructed by combining Occupancy Grid Mapping (OGM) and Signed Distance Functions (SDF). The OGM framework abstracts sensor inputs, making the solution compatible with any sensor modality capable of generating occupancy maps. Moreover, the OGM enhances situational awareness along the robot's motion trajectory, by integrating both current and previously mapped data. The SDF encapsulates complex obstacle shapes defined by OGM into real-time computable values, enabling the method to handle obstacles of arbitrary shapes. This enables a single constraint in the CBF-QP optimization for each point on the robot, regardless of the number or shape of obstacles. The effectiveness of the proposed approach is demonstrated through simulations on autonomous driving in the CARLA simulator and real-world experiments with an industrial mobile robot, using a simplified 2D version of the method.
Read more9/16/2024

0
Neural Control Barrier Functions for Safe Navigation
Marvin Harms, Mihir Kulkarni, Nikhil Khedekar, Martin Jacquet, Kostas Alexis
Autonomous robot navigation can be particularly demanding, especially when the surrounding environment is not known and safety of the robot is crucial. This work relates to the synthesis of Control Barrier Functions (CBFs) through data for safe navigation in unknown environments. A novel methodology to jointly learn CBFs and corresponding safe controllers, in simulation, inspired by the State Dependent Riccati Equation (SDRE) is proposed. The CBF is used to obtain admissible commands from any nominal, possibly unsafe controller. An approach to apply the CBF inside a safety filter without the need for a consistent map or position estimate is developed. Subsequently, the resulting reactive safety filter is deployed on a multirotor platform integrating a LiDAR sensor both in simulation and real-world experiments.
Read more7/30/2024
0
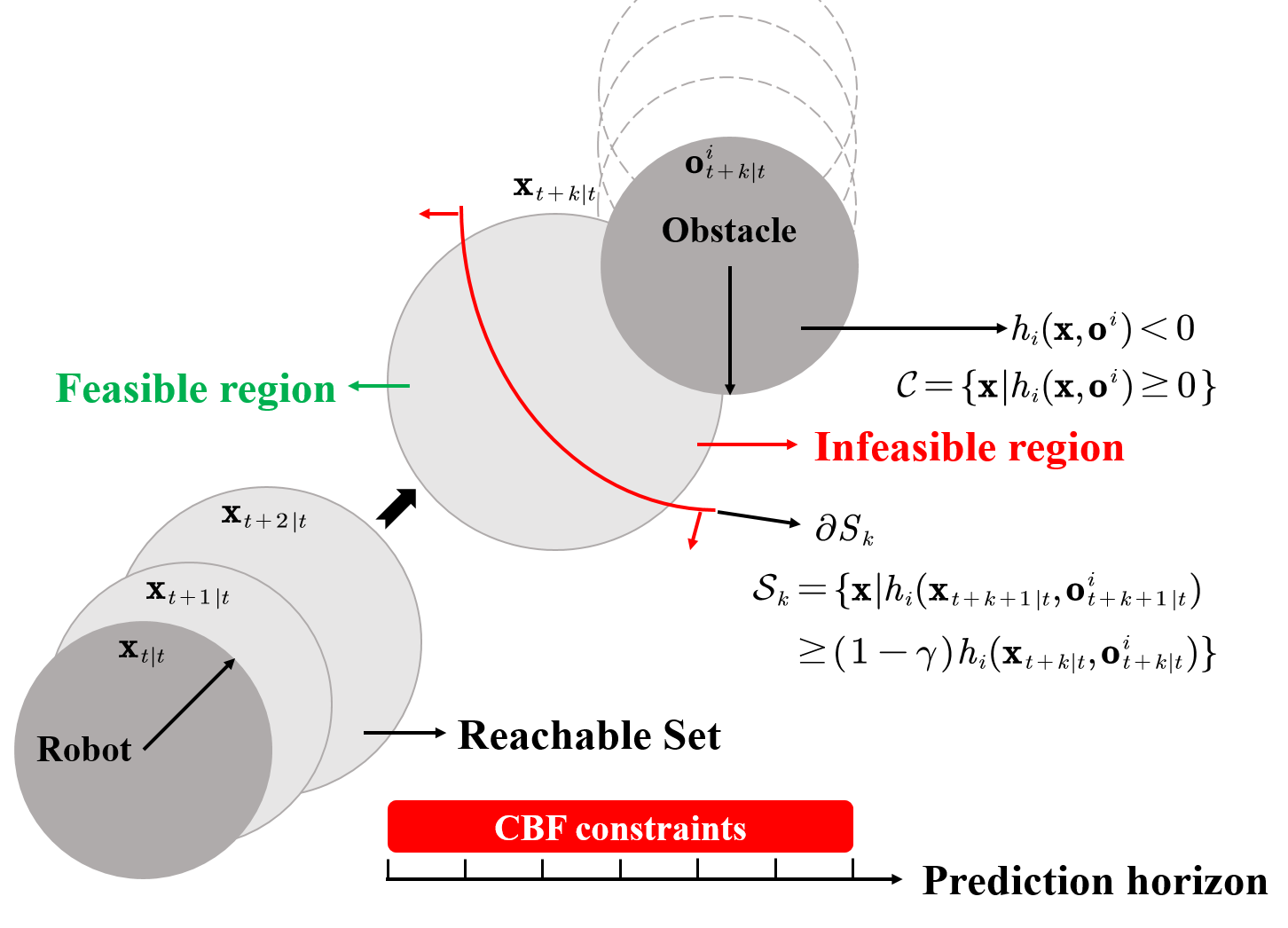
Robot Safe Planning In Dynamic Environments Based On Model Predictive Control Using Control Barrier Function
Zetao Lu, Kaijun Feng, Jun Xu, Haoyao Chen, Yunjiang Lou
Implementing obstacle avoidance in dynamic environments is a challenging problem for robots. Model predictive control (MPC) is a popular strategy for dealing with this type of problem, and recent work mainly uses control barrier function (CBF) as hard constraints to ensure that the system state remains in the safe set. However, in crowded scenarios, effective solutions may not be obtained due to infeasibility problems, resulting in degraded controller performance. We propose a new MPC framework that integrates CBF to tackle the issue of obstacle avoidance in dynamic environments, in which the infeasibility problem induced by hard constraints operating over the whole prediction horizon is solved by softening the constraints and introducing exact penalty, prompting the robot to actively seek out new paths. At the same time, generalized CBF is extended as a single-step safety constraint of the controller to enhance the safety of the robot during navigation. The efficacy of the proposed method is first shown through simulation experiments, in which a double-integrator system and a unicycle system are employed, and the proposed method outperforms other controllers in terms of safety, feasibility, and navigation efficiency. Furthermore, real-world experiment on an MR1000 robot is implemented to demonstrate the effectiveness of the proposed method.
Read more4/10/2024
🎲
0
Recursively Feasible Probabilistic Safe Online Learning with Control Barrier Functions
Fernando Casta~neda, Jason J. Choi, Wonsuhk Jung, Bike Zhang, Claire J. Tomlin, Koushil Sreenath
Learning-based control has recently shown great efficacy in performing complex tasks for various applications. However, to deploy it in real systems, it is of vital importance to guarantee the system will stay safe. Control Barrier Functions (CBFs) offer mathematical tools for designing safety-preserving controllers for systems with known dynamics. In this article, we first introduce a model-uncertainty-aware reformulation of CBF-based safety-critical controllers using Gaussian Process (GP) regression to close the gap between an approximate mathematical model and the real system, which results in a second-order cone program (SOCP)-based control design. We then present the pointwise feasibility conditions of the resulting safety controller, highlighting the level of richness that the available system information must meet to ensure safety. We use these conditions to devise an event-triggered online data collection strategy that ensures the recursive feasibility of the learned safety controller. Our method works by constantly reasoning about whether the current information is sufficient to ensure safety or if new measurements under active safe exploration are required to reduce the uncertainty. As a result, our proposed framework can guarantee the forward invariance of the safe set defined by the CBF with high probability, even if it contains a priori unexplored regions. We validate the proposed framework in two numerical simulation experiments.
Read more9/5/2024